


第一部分:实时库系统是为组态提供实时数据,实时数据为采集设备的原始数据,原始数据的类型决定采集数据的表现形式。实时数据库是按照双字节存储,每个寄存器存储一个数据,BOOL变量也是如此。实时数据库是一个海量内存区域,可同时接纳400万个点的区域,提供两个操作接口,一个是读接口,另一个是写接口,读写接口使用一个信号量保证操作同步进行。查询方式按照地址偏移量直接地址寻址。
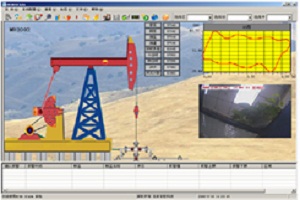
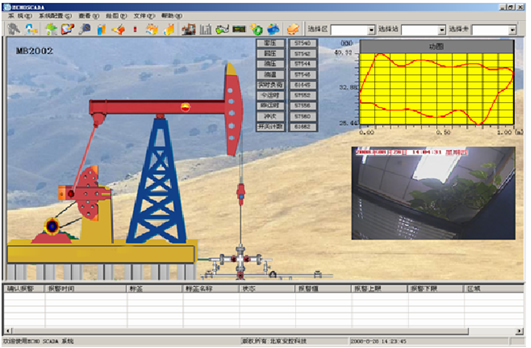
第二部分:视图系统提供两个层面的应用。一编辑视图;二应用视图。编辑视图是利用图形系统提供的图形元素构建一个工程应用视图。每种图形元素定义了各自的操作和属性,利用这些操作和属性可组合出不同的视图模板。视图模板指定好后就可以进入应用视图。应用视图按照模板的图形元素布局工程显示界面,其中应用的实时数据显示部分调用实时库。编辑视图部分和应用视图部分相同点是同时调用图形系统,不同点是应用视图还需要调用实时库。图形系统中每个控件可连接的数据点有点和点集两种形式,这两种形式可包含多种工程的应用,对于点可配置报警、工程值转换、存储等。对于点集可配置图形数据,不能配置报警和工程值转换。
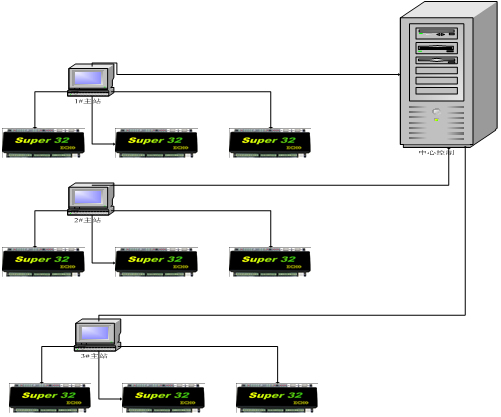
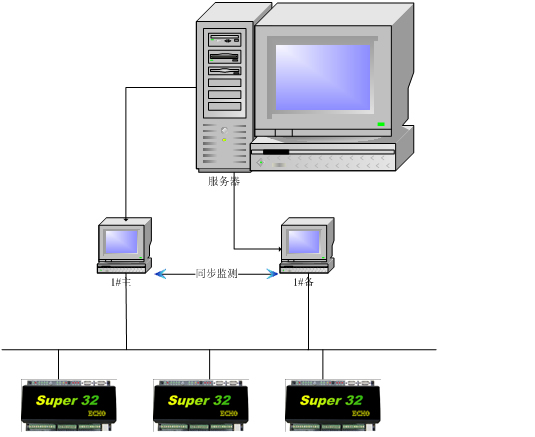
第三部分:驱动部分是设备数据到系统传递的中枢,即下位机数据到上位机的通道主体。在工程应用中是非常重要的部分,驱动的稳定性直接影响工程的质量,驱动是长时间运行的,要求压力测试运行不小于1年。驱动对应于不同的设备的不同接口,不同的接口的通讯协议可能不一致。目前设计的通讯协议在同时刻使用一种通讯协议,但是接口可以不相同,驱动适应串口、网络TCP/UDP、GPRS三种接口;采集协议有modbus、4300、DNP3; 可采集站点多达200个,采集实时点40000点,采集时间100毫秒到1天,可定时采集;驱动提供数出接口,别的组态软件要读取我们设备的途径是OPC或MODBUS协议;驱动可以分布运行和组网运行。对于大的站点,比如1024站点的应用时,可以采用分布运行,每个集群站可归并为一个主站点,将所有主站点集中到中心站;组网运行应用在作业区内数据的交叉应用和多级应用;采用DCOM技术实现驱动可提供多个组态客户端访问;在一个工程中实时数据的珍贵性决定数据不能丢,但是万一因硬件故障发生,驱动可执行热备。驱动热备是与组态相关联的,驱动可以实现数据相互同步,组态在发现连接的驱动失去联系,马上切换到备份驱动上面。
驱动组网结构图:
[A树形拓扑图]
[B网型拓扑图]
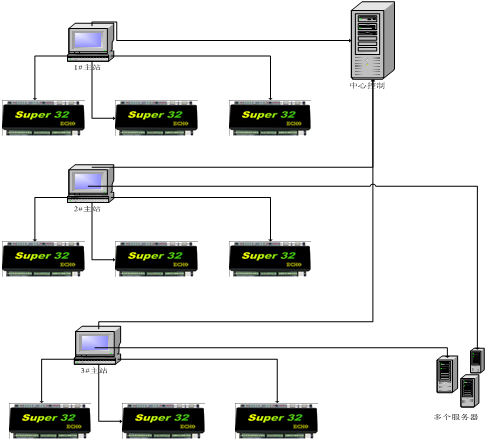
[C驱动热备拓扑图]
第四部分:报表系统是对数据的一种表现形式,报表没有定式,不同用户对报表的需求不同,报表系统的使用和设计风格可通过模板的制作完成,报表具有打印功能。
第五部分:历史数据存储是组态软件另一个亮点,实时采集的数据存储到数据库和本地文件,在回放系统中显示过去的信息。历史数据可设定存储间隔,最小为1分钟最大为1天。报表系统读取历史数据形成报表文件。
第六部分:操作日志用来记录操作人员操作的信息,操作用户、操作时间、操作对象、操作内容。
第七部分:报警系统在组态系统中是必不可少的部分,报警系统能够及时预报现场的运行情况,尽早避免灾害的发生。报警系统时时读取采集数据,根据采集点的报警标线来判断报警的类型,用不同颜色来区别报警的类型,发生报警即可存储,存储到数据库和本地文件。 报警数据作为一种报警记录可便于查询。
第八部分:用户管理主要将使用的用户分级管理,普通用户只能使用工程,不能编辑工程;工程师用户可以编辑和使用工程;用户管理员可以分配用户、编辑工程和使用工程,是权限最高的。
第九部分:设备管理是将现场使用的所有设备的实施管理职能,比如一个作业区可有抽油机、电机、控制器、仪表将这些设备的信息有机组织起来便于用户的查阅。
性能
1、精度
1、 实时库
实时点最大40000点,功图为1点处理
实时点存储最小1分钟
数据点集最大长度300
2、组态视图
最大组态控件1024个/页
组态页面没有控制
添加工程页面没有限制
3、驱动
采集最小时间间隔100毫秒
驱动通道最大数1024
每通道设备最大数1024
4、报表
无限制
5、历史数据存储
可浏览数据每次900条
显示时段=间隔*900
6、操作日志
无限制
7、报警
无限制
8、用户管理
最大用户数256
9、设备管理
根据实际需要设定,无限制。
2 时间特性
a. 响应时间:一次通信小于1秒
b. 更新处理时间:1秒
c. 数据的转换和传送时间:10毫秒




共0条 [查看全部] 网友评论