



 ЫХЗўЧ§ЖЏЦї аЭКХЃКDSD23
ЫХЗўЧ§ЖЏЦї аЭКХЃКDSD23ЙІТЪЃКЪЪХфЙІТЪЮЊ1500W~2.3KWЕчЛњ
зджїбаЗЂЕФаТвЛДњШЋЪ§зжНЛСїЫХЗўЧ§ЖЏЦїЃЌжївЊВЩгУзюаТЪ§зжаХКХДІРэЦїDSPММЪѕКЭДѓЙцФЃПЩБрГЬFPGAММЪѕЮЊКЫаФЕФдЫЫуЕЅдЊЃЌМАжЧФмIPMЙІТЪФЃПщЃЌОпгаЯьгІЫйЖШПьЃЌБЃЛЄЭъЩЦЃЌПЩППадИпЕШвЛЯЕСагХЕуЁЃ
ЕїЫйБШЮЊ1ЃК5000ЃЌДгЕЭЫйЕНИпЫйЖМОпгаЮШЖЈЕФзЊОиЬиад
ПижЦЖЈЮЛОЋЖШ±0.01%,300%ЕФЙ§диФмСІ
ВЩгУПеМфЪИСППижЦЫуЗЈЃЌБШЦеЭЈЕФSPWM ВњЩњЕФСІОиИќДѓЃЌдывєИќаЁ
ЭъЩЦЕФБЃЛЄЙІФмЃКЙ§СїЃЌЙ§бЙЃЌЙ§ШШКЭБрТыЦїЙЪеЯ
ЖржжЯдЪОЙІФмЃКАќРЈЕчЛњзЊЫйЁЂЕчЛњЕчСїЁЂЕчЛњЮЛжУЁЂЮЛжУЦЋВюЁЂТіГхИіЪ§ЁЂТіГхЦЕТЪЁЂжБЯпЫйЖШЁЂЪфШыЪфГіНгПкеяЖЯЁЂРњЪЗБЈОЏМЧТМЕШ DSD23ЫХЗўЧ§ЖЏЦїЪЧЛљзљАВзАаЭЫХЗўЧ§ЖЏЦї
ДЂДцЬѕМў:дкЮДЭЈЕчЕФзДЬЌЯТДЂДцЫХЗўЧ§ЖЏЦїЪБЃЌЧыдкЯТЪіЮТЖШЗЖЮЇФкНјааДЂДцЃК-20 ЁЋ +85 ЁцАВзАГЁЫљ
ПижЦЙёФкЕФЛЗОГЬѕМў:
1.ЫХЗўЧ§ЖЏЦїЕФЛЗОГЮТЖШЃК0 ~ 55 Ёц
2.ЪЊЖШЃК90%RH(ЯрЖдЪЊЖШ)вдЯТ
3.еёЖЏЃК4.9m/s2
4.ВЛвЊГіЯжЖГНсЁЂНсТЖЕШЯжЯѓ
5.ЮЊСЫБЃжЄГЄЦкЪЙгУЕФПЩППадЃЌЧыдкЕЭгк45 ЁцЕФЛЗОГЮТЖШЬѕМўЯТЪЙгУ
гыФЃФтжИСюЪфШыЕчТЗЕФНгПк:ФЃФтаХКХЪЧЫйЖШжИСюаХКХКЭзЊОижИСюаХКХЃЌжИСюЪфШызшПЙдМ40kΩЃЌЪфШыаХКХЕФзюДѓдЪаэЕчбЙЮЊ±10VгыЪфШыЕчТЗЕФНгПк:ЪЙгУМЬЕчЦїЛђепМЏЕчМЋПЊТЗЕФОЇЬхЙмЕчТЗРДСЌНгЁЃЪЙгУМЬЕчЦїСЌНгЪБЃЌЧыбЁЖЈЮЂаЁЕчСїгУМЬЕчЦїЁЃШчЙћВЛЪЙгУЮЂаЁЕчСїгУМЬЕчЦїЃЌдђЛсдьГЩНгДЅВЛСМЁЃгызмЯпЧ§ЖЏЦїЪфГіЕчТЗЕФНгПк:НЋБрТыЦїЕФ2Яр(AЯрЃЌBЯр)ТіГхЕФЪфГіаХКХ(PAOЁЂ/PAOЁЂPBOЁЂ/PBO)КЭдЕуТіГхаХКХ(PCOЁЂ/PCO)ЭЈЙ§змЯпЧ§ЖЏЦїЪфГіЕчТЗНјааЪфГіЁЃЭЈГЃЕБдкЩЯЮЛзАжУВрЙЙГЩЮЛжУПижЦЯЕЭГЪБЪЙгУЁЃдкЩЯЮЛзАжУВрЃЌЧыЪЙгУЯпНгЪеЕчТЗНгЪеЁЃгыЪфГіЕчТЗЕФНгПк:ЫХЗўБЈОЏЁЂЫХЗўзМБИОЭаївдМАЦфЫќЕФЫГађгУЪфГіаХКХгЩЙтЕчёюКЯЦїЪфГіЕчТЗЙЙГЩЁЃЪЙгУМЬЕчЦїЁЂЯпНгЪеЕчТЗСЌНгЁЃ
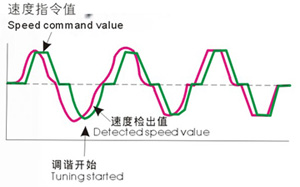
здЖЏЕїаГ
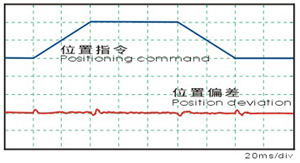
ЭЈЙ§ВЩгУСЫаТЕФЫуЗЈЕФЙпадКуЕШЙІФмКЭ5жжЕїаГЬиадбЁдёЁЂ30МЖЯьгІадЩшЖЈЛђРћгУВЮЪ§ЕФздЖЏБЃДцЙІФмЃЌПЩЪЕЯжЬсИпЯьгІадЕФздЖЏЕїаГЁЃ
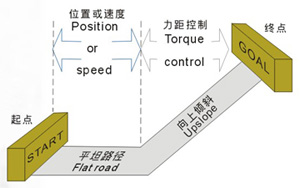
ПижЦЗНЪНЧаЛЛ
ЮЛжУПижЦЁЂЫйЖШПижЦЁЂСІОрПижЦетШ§жжПижЦаЮЪНБЛКЯЮЊвЛЬхЃЌПЩдкдЫЖЏжаЧаЛЛЁЃ
ЕчдДИпДЮаГВЈЖдВп
БъзМзАБИгаDCЖѓСїШІзгСЌНгЖЫзгзїЮЊЕчдДИпДЮаГВЈЕФЖдВпгУЁЃ
 6ЮЛЯдЪОLEDЁЂФкжУВйзїМќХЬ
6ЮЛЯдЪОLEDЁЂФкжУВйзїМќХЬФмдкЯжГЁЗНБуЕиНјааЩшЖЈЛђМрПиЁЃПЩвдгУФкжУВйзїМќХЬНјааВЮЪ§БфИќЁЂМрПизАжУКЭБЈОЏзЗМЃЕФЕїећЕШЁЃ

МѕеёПижЦ
РћгУЧАРЁМѕеёПижЦЃЌПЩЭЈЙ§МђЕЅЕФЕїећРДвжжЦЛњаЕЧАЖЫЕФеёЖЏКЭЛњМмЕФеёЖЏЁЃЭЌЪБЃЌФмЙЛЩшЖЈВЂбЁдёЪЙгУ4жжгУвдПижЦеёЖЏЕФЦЕТЪЁЃ
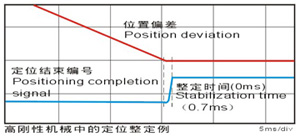
ЫѕЖЬСЫЖЈЮЛећЖЈЪБМф
ЭЈЙ§ВЩгУаТЫуЗЈЃЌПЩДѓЗљЖШЕиЫѕЖЬзАжУЕФЖЈЮЛећЖЈЪБМфЁЃ
жИСюзЗзйвжжЦ
ВЩгУаТЕФЮЛжУКЭЫуЗЈЃЌПЩЪЙЮЛжУвжжЦзЗзйФмСІЬсИпЕНЯжгаФЃаЭЕФСНБЖЃЌВЂЧвЃЌЛљБОПЩЪЕЯжСуЮЛжУЦЋВюЁЃ
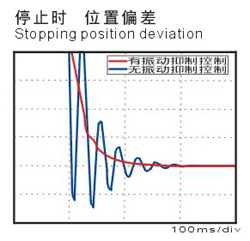
ЪддЫзЊЙІФм(ЮЂЖЏЙІФм)
ДюдигаФмЙЛШЗШЯТэДяКЭЗХДѓЦїСЌНгЕФЮЂЖЏЙІФмЃЌВЛБигыЩЯЮЛзАжУСЌНгЃЌБуФмНјааЪддЫзЊЁЃ
ЪфШыгыЪфГіаХКХУћГЦМАЦфЙІФм
ЪфШыаХКХ
аХКХУћ ЙІФм +24VIN ЫГађаХКХгУПижЦЕчдДЪфШыЃК+24V ЕчдДгЩгУЛЇзМБИЁЃ ПЩвдЖЏзїЕФЕчбЙЗЖЮЇЃК+11V ЁЋ +25V SON ЫХЗўONЪфШыЃЌгааЇКѓЃЌ50msНгЪеПижЦжИСю INH жИСюТіГхНћжЙЁЃ FSTP НћжЙе§зЊЧ§ЖЏ RSTP НћжЙЗДзЊЧ§ЖЏ ALR БЈОЏЧхГ§ЃКНтГ§ЫХЗўБЈОЏзДЬЌЁЃ CLR ЧхСуаХКХЪфШыЃКЮЛжУПижЦЪБЃЌЧхГ§ЦЋвЦМЦЪ§ЁЃ RIL е§зЊзЊОиЭтВПЯожЦЪфШы FIL ЗДзЊзЊОиЭтВПЯожЦЪфШы VIN ЫйЖШжИСюЪфШыЃК±10VЁЃ TIN зЊОижИСюЪфШы: ±10VЁЃ CZ+
CZ- ПЩБрГЬЪфГіЁЃ /PULS
PULS
/SIGN
SIGN жИСюТіГхЪфШыЃЌЙтёюИє ЪфШыФЃЪН
*ЗћКХ+ТіГхСа
*CCW/CWТіГх
ЪфГіаХКХ
аХКХУћ ЙІФм COIN-
COIN+ ЖЈЮЛНсЪјаХКХЪфГіЃЌЕБаХжУЦЋВюМЦЪ§ЦїЪ§жЕдкЩшЖЈЕФЖЈЮЛЗЖЮЇЪБЃЌЖЈЮЛЭъГЩЪфГіON ALM+
ALM- БЈОЏЪфГі RDY+
RDY- ЫХЗўзМБИКУЪфГі BRK+
BRK- жЦЖЏЦїЪфГі PAO+
PAO-
PBO+
PBO-
PCO+
PCO- AЯраХКХ BЯраХКХ CЯраХКХ 2ЯрТіГх(AЯрЁЂBЯр)зЊЛЛБрТыЦїЪфГіаХКХвдМАдЕуТіГх(CЯр)аХКХ FG ШчЙћНЋЪфШыЁЂЪфГіаХКХгУЕчРТЕФЦСБЮЯпСЌНгЕНСЌНгЦїЭтПЧЩЯЃЌдђПЩвдСЌНгЕНПђМмНгЕиЯпЁЃ(ЕиЯп)




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл