


MV-VS210双目标物体自动跟踪识别系统
一、系统描述
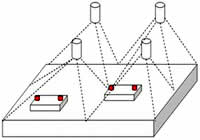
本系统是对平台上的两个互不相关的运动物体进行跟踪检测,通过识别每个运动物体上的两个标志点来识别运动物体的方位,并随时给出运动物体的标志点X、Y坐标值。系统平台示意图如下:
系统平台示意图
其中:总框表示平台区域,两个小矩形表示运动物体,红色原点表示运动物体的方位标志。
二、系统需求
1. 分辨率要求为:2mm
2. 物体运动速度:5mm-10mm/每秒钟
3. 标志点距离:20公分
4. 平台范围:3m*4m
三、系统方案
依据系统需求,拟采用4个彩色高分辨率摄像机分别监视平台的四个区域,并获取整个平台范围内的图像。4个区域图像传入计算机进行合并处理。系统结构示意图
根据系统需求指标,兼顾物体运行速度、分辨率指标和处理算法综合因素考虑,系统各单元分配指标如下:
摄像机:彩色
最大分辩率:1600×1200
总线接口标准:1494
计算机主频:3G
算法处理时间:0.2s
三、系统软件
1. 程序结构
程序结构框图
2.结构模块说明
线性滤波器处理方法、非线性滤波器处理、图像分割方法、
基于改进遗传算法的扭弯曲图像分割、图像边缘检测、图像梯度算子、图像细化、中轴变换、简化中轴变换算法
3.软件流程
软件流程图
4.某项目中的部分处理流程与效果图:
(a)采集的原始图像,(b)预处理图像,(c)分割图像, (d)边缘检测图像,(e)二次中值滤波图像,(f)细化图像, (g)特征图像。之后为配准、融合、坐标计算等
四、目标检测与跟踪
1.采用图像增强、目标运动预测、管道滤波、自适应阈值分割等算法,实现对目标的高精度跟踪,同时将漏警概率、虚警概率降到最低。
● 图像增强采用非线性均值滤波算法实现;
● 管道滤波器采用加权移动式管道滤波算法;
● 阈值分割采用基于目标边缘梯度特征的自适应阈值提取算法;
● 目标检测采用点聚类算法;
● 目标预测采用两点线性预测算法;
2.目标物体的特征识别模块
图像滤波,亚象素边缘及线提取,边缘位置测量,区域处理,图像分割,数学形态学,模式匹配
3.显示模块
显示模块完成图像与数据的直观显示。采用DIRECT SHOW技术实现图像快速显示,同时显示目标运动过程当中的X、Y位置、夹角信息。




共0条 [查看全部] 网友评论