



ЁЁЁЁJMC-5400ЪЧвЛПюPCIНгПк4жсдЫЖЏПижЦПЈЃЛОпгаСНМЖЛКГхМФДцЦїЃЌПЩЪЕЯжСЌајВхВЙЁЂжЇГжгВМўжБЯпЁЂдВЛЁВхВЙЁЂВЮЪ§МЦЫуЁЂЪжТжЪфШыЁЂЗЩааМг/МѕЫйДІРэЁЂЖржсжБЯпВхВЙЁЂЖрПЈЖржсЭЌВНЁЂАхПЈIDЩшжУЁЂЖЏЬЌаоИФФПБъЮЛжУЁЂжЇГжЗЧЖдГЦМгМѕЫйЕШЙІФмЃЌПЩНгЪмБрТыЦїаХКХЃЌВЂЬсЙЉЮЛжУЫјДцКЏЪ§ЁЃВЖЛёЕБЧАЮЛжУаХКХЙ§ГЬгЩгВМўИпЫйЭъГЩЃЛжЇГжЮЛжУБШНЯЃЈДѓгкЁЂЕШгкЁЂаЁгкЃЉЙІФмЃЌБШНЯЬѕМўТњзуЪБПЩВњЩњБШНЯЪфГіаХ
КХЃЌВЂЧвПЩВњЩњжаЖЯЁЃ
| ЙцИё | гІгУЗЖЮЇ |
| 1ЃЌ32ЮЛ32MHz3.3/5.0 OV PCIБъзМавщ 2ЃЌЕЅПЈПЩПижЦ4жс 3ЃЌзюДѓТіГхЪфГіЦЕТЪ9.8M PPS 4ЃЌжЇГжTаЭЫйЖШЧњЯпЃЌSаЭЫйЖШЧњЯпМгЫй/МѕЫй 5ЃЌжЇГждЫаажаИФБфЫйЖШЃЈЗЩааМг/МѕЫйЃЉ 6ЃЌ28bitЮЛжУМЦЪ§ЦїЃЌ 7ЃЌжЇГжЮЛжУБШНЯЦїЃЌПЩВњЩњжаЖЯЃЌВЂжЇГжБШНЯЪфГі 8ЃЌжЇГжжаЖЯЙІФм 9ЃЌжЇГжЮЛжУЫјЗтЃЌПЩВњЩњжаЖЯ 10ЃЌжЇГжШЮвтСНжсдВЛЁВхВЙ 11ЃЌжЇГжБрТыЦїЪфШы 12ЃЌЖдЯоЮЛПЊЙиЃЌдЕуПЊЙиЃЌЫїв§аХКХЃЌINP,ERC,ALMгазЈ УХЕФI/OНгПк 13ЃЌжЇГжЪжвЁТжЪфШы 14ЃЌжЇГжАхКХЩшжУЃЌЭЌвЛЯЕЭГПЩжЇГж16еХJMC5400 15ЃЌ16ТЗПЊМЏЕчМЋЗЧИєРыЪ§зжЪфГіЃЈDOЃЉ 16ЃЌ16ТЗИєРыЪ§зжЪфШыЃЈDIЃЉ |
1ЃЌАыЕМЬхЯрЙиЩњВњЩшБИ
|
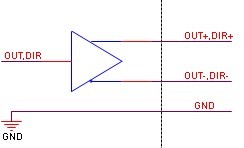
аХКХСЌНг
| ТіГхаХКХКЭЗНЯђаХКХЪфГі ИїжсЕФOUTКЭIRЪфГіПкЪЧгУгкЪфГіТіГхКЭЗНЯђаХКХЃЌЦфЪфГіИёЪН ПЩвдгаГЬађЩшЖЈГЩCW/CCWЫЋТіГхФЃЪНКѓТіГх+ЗНЯђФЃЪН ШчЙћТіГхЪфГіЮЊЕЅЖЫЪфШыФЃЪНЃЌдђOUT-КЭDIR-зїЮЊТіГхКЭЪфГіаХ КХЕФЪфГіЖЫЃЌЪЙгУCN1ЩЯЕФ5VРДзїЮЊПижЦаХКХЕФЕчдДЁЃ |
БрТыЦїЪфШыаХКХEAЃЌEBКЭEZ БрТыЦїЪфШыаХКХАќРЈEAЃЌEBКЭEZЃЌУПИіжсЖМгаШ§ЖдВюЗж AЯрЃЌBЯрЃЌZЫїв§аХКХ EAКЭEBгУРДНјааЮЛжУМЦЪ§ЃЌEZПЩгУзїдЕуаХКХЃЌУПЖдВю ЗжЪфШыаХКХНЋБЛзЊЛЏГЩEA,EB,EZЕФTTLЕчЦНаХКХЃЌЯТБэЮЊ БрТыЦїЪфШыаХКХв§НХКХКЭЫЕУїЃК |
 |
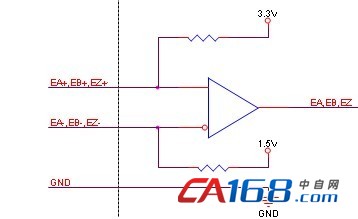 |
БрТыЦїЪфШыаХКХНгЯпЗНЗЈШчЯТЃК
|
ВюЗжЪфШыФЃЪН |
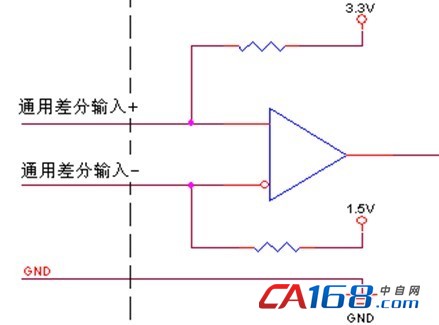
ЕЅЖЫЪфШыФЃЪН дкДЫФЃЪНЯТЃЌЪфШыаХКХНгЕНВюЗжЪфШыЕФEA+/EB+/EZ+ЖЫЁЃEA-/EB-/EZ-ЖЫ аќПеЁЃ |
 |
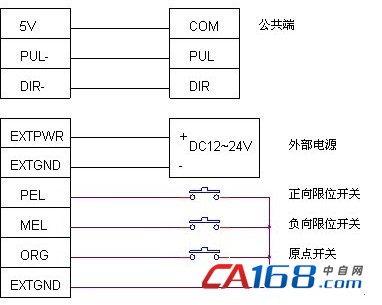 |
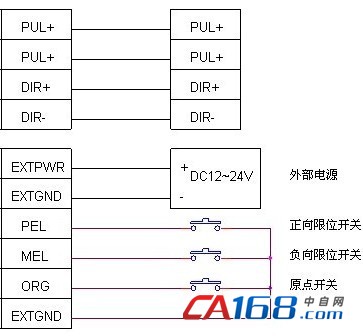
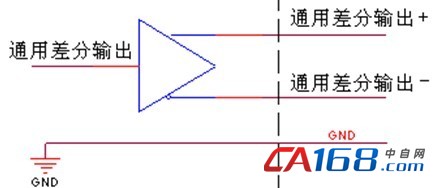
| дЕуПЊЙиаХКХ дЕуаХКХЪфШыгУгкМьВтИУжсЕФдЕуЃЌПЩЭЈЙ§гУЛЇШэМўЩшЖЈЛидЕуФЃЪНЃЌЦфФкВПгаТЫВЈЕчТЗЃЌПЩвдЙ§ТЫаЁгкдыЩљЃЌвдЬсИпЯЕЭГЕФПЩППадЁЃ дЕуаХКХЪфШыдРэЭМШчЯТЃК |
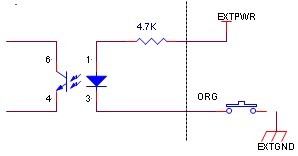
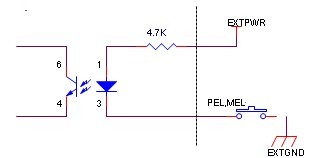
е§ЗДЗНЯђЯоЮЛаХКХPEL/MEL УПвЛжсЖМгаСНИіЯоЮЛаХКХЃЌPELЃЈе§ЯоЮЛЃЉКЭMELЃЈЯоЮЛЃЉгУЛЇПЩЭЈЙ§S1ВІТыПЊЙиЩшжУЯоЮЛаХКХЕФгааЇЕчЦНЮДбЁдёдЕуПЊЙиЮЊГЃБеЗНЛђепГЃПЊЗНЪНЁЃ ELаХКХЪфШыдРэЭМШчЯТЫљЪОЃК |
 |
 |
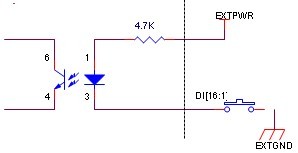
| ЭЈгУЪфШыаХКХDI JMC-5400ЬсЙЉСЫ16ТЗИєРыЪ§зжЪфШыНгПкЃЌЙЉгУЛЇЪЙгУЁЃ ЭЈгУЪ§зжЪфШыаХКХЪфШыдРэЭМШчЯТЭМЫљЪОЃК |
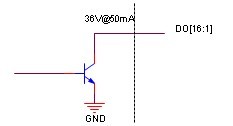
ЭЈгУЪфГіаХКХDO JMC-5400ЬсЙЉСЫ16ТЗЗЧИєРыЕФПЊМЏЕчМЋЃЈOCЃЉЪфГі ЭЈгУЪ§зжЪфГіаХКХдРэЭМШчЯТЫљЪОЃК |
 |
 |
|
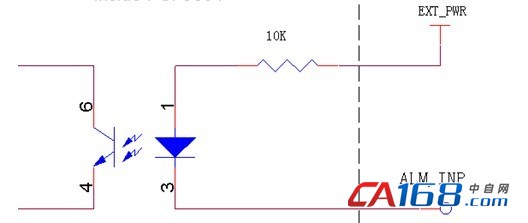
ALM,INPЪфШы |
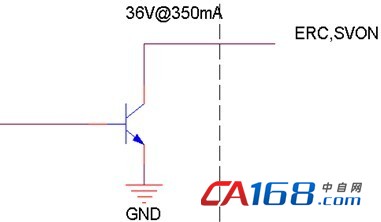
ERCКЭSVON ERCКЭSVONЮЊЗЧИєРыЕФМЏЕчМЋПЊТЗЃЈOCЃЉЪфГіЃЌдРэЭМШчЯТЃК |
 |
 |
| ЭЈгУВюЗжЪфГі JMC-5400ФкВПЕФЭЈгУВюЗжЪфГідРэЭМШчЯТЃК |
ЭЈгУВюЗжЪфШы ЭЈгУВюЗжЪфШыЪОвтЭМШчЯТЃК |
 |
 |
LTCКЭCLRаХКХ
LTCЃЈЫјДцаХКХЃЉКЭCLRЃЈМЦЪ§ЦїЧхСуЃЉаХКХЮЊTTLЪфШы
VЃЈIHЃЉзюаЁжЕЮЊ2VЃЌVЃЈILЃЉзюДѓжЕЮЊ0.8V




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл