



ИХЪі
- MCDCЯЕСаШЋЪ§зжжБСїЫХЗўЧ§ЖЏЦїВЩгУзюаТ32ЮЛDSPПижЦММЪѕЩшМЦЩњВњЕФЕЭГЩБОШЋБеЛЗШЋЪ§зжжБСїЫХЗўЧ§ЖЏЦїЁЃАќРЈШ§ИіЗДРЁЛиТЗ
- (ЮЛжУЛиТЗЁЂЫйЖШЛиТЗвдМАЕчСїЛиТЗ)ЁЃПЩвдЙЄзїдкЮЛжУЃЌЫйЖШКЭзЊОиФЃЪНЃЌЦфжИСюаХКХгыВННјЧ§ЖЏЦїМцШнЃЌгУЛЇВЛгУИќЛЛПижЦЦїЃЌОЭ
- ПЩНЋЫљгаВННјЧ§ЖЏЩ§МЖЮЊЫХЗўЧ§ЖЏЃЌПЩЙуЗКгУгкВННјВњЦЗЕФЩ§МЖИФдьЁЃ
- MCDCЯЕСаЬхЛ§аЁЧЩЁЂАВзАЗНБуЁЂПЩППадИпЁЂЕїЪдМђЕЅЁЃ
- ЪЪКЯЧ§ЖЏЕчбЙDC24-50VЙІТЪдк200WвдЯТЕФжБСїЫХЗўЕчЛњЁЃ
ЫХЗўЯЕЭГЕФВЮЪ§ЕїећКЭЩшжУ(ЕчЮЛЦїФцЪБеыЕїЪБжЕМѕаЁЃЌЫГЪБеыЕїЪБжЕдіДѓ)
AЃКЧ§ЖЏЦїЕчТЗАхЩЯгавЛИі4ЮЊКЭ9ЮЊВхеыЃЌзі2ЮЛФЃЪНЩшжУЁЃ
ШчЭМЫљЪОЃЌГіГЇЩшжУЮЊJ1гыJ1AЕФ4НХгУЬјЯпУБЖЬТЗЃЈМДЪЙПЩЕїЕчЮЛЦїгааЇЃЉ
B:ЕуЮЛЦїга11ИіПЬЖШЃЌФцЪБеыЬјЕНЭЗЮЊ0ЃЌЫГЪБеыЕїЕНЭЗЮЊ10ЃЌжаМфЮЊ5.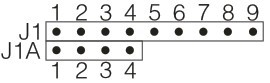
1ЃЉJ1гыОЭAЕФ1ЁЂ2ЁЂ3НХЖМВЛВхЪБЃЌЮЊЮЛжУФЃЪНМДТіГх/ЗНЯђЁЃ 2ЃЉJ1гыJ1AЕФ1НХгУЬјЯпУБЖЬТЗЪБЃЌЮЊЫйЖШФЃЪНЃЌPos.ffзіЫйЖШЪфШы 3ЃЉJ1гыJ1AЕФ2НХгУЬјЯпУБЖЬТЗЪБЃЌЮЊСІОиФЃЪНЃЌгЩPos.ffзізЊОиЪфШы 4ЃЉJ1гыJ1AЕФ1НХ ЭЌЪБгУЬјЯпУБЖЬТЗЪБЃЌЮЊЮЛжУФЃЪНе§ТіГх/ИКТіГхЪфШыЃЌМДЫЋТіГх J1гыJ1AЕФ2НХ 5ЃЉJ1гыJ1AЕФ3НХгУЬјЯпУБЖЬТЗЪБЃЌЮЊЮЛжУФЃЪНТіГх/ЗНЯђЪфШыЃЌЕЋзЊЖЏЗНЯђЯрЗД
ЫХЗўЯЕЭГАќРЈШ§ИіЗДРЁЛиТЗЁОЮЛжУЛиТЗЁЂЫйЖШЛиТЗвдМАзЊОиЃЈЕчСїЃЉЛиТЗЁПЁЃзюФкЛЗЕчСїЛиТЗЕФЗДгІЫйЖШзюПьЃЌжаМфЛЗНкЫйЖШЕФЗД
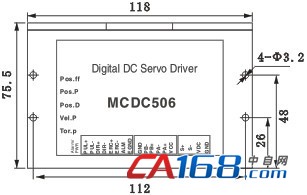
Poss.ff ЮЛжУЧАРЁЕїНк Poss.P ЮЛжУБШР§дівцЕїНк Poss.D ЮЛжУЮЂЗжЕїНк Vel.P ЫйЖШБШР§дівцЕїНк Tor.P ЕчСїБШР§дівцЕїНк
гІЫйЖШБиаыИпгкзюЭтЛЗЛиТЗЁЃМйЪЙЮЊзёЪиДЫЙцдђЃЌНЋЛсдьГЩеёЖЏЛђЗДгІВЛСМЁЃЫХЗўЧ§ЖЏЦїЕФЩшМЦПЩШЗБЃЕчСїЛиТЗОпБИСМКУЕФЗДгІаЇФмЁЃ
гУЛЇжЛашвЊЕїећЮЛжУЛиТЗгыЫйЖШЛиТЗВЮЪ§ЁЃЯЕЭГИїВЮЪ§здМьзмЪЧЯрЛЅжЦдМЕФЃЌШчЙћжЛгаЮЛжУЛиТЗдівцдіМгЃЌЮЛжУЛиТЗЪфГіЕФжИСюПЩФмБф
ЕУКмВЛЮШЖЈЃЌвджСећИіЫХЗўЯЕЭГЕФЗДгІПЩФмБфЕУВЛЮШЖЈЁЃЭЈГЃПЩВЮееЯТСаВНжшЖдЯЕЭГНјааЕїећЁЃ
дкећИіЯргІЮоГЌЕїЃЌЮоеёЖЏЕФЧАЬсЯТЃЌгІНЋЮЛжУдівцЩшЕНзюДѓЁЃЫцКѓЖдЫйЖШдівцМАЮЛжУЧАРЁЁЂЮЛжУЮЂЗжНјааЮЂЕїЃЌевЕНзюМбжЕЁЃ1ЃЉНЋЮЛжУЧАРЁКЭЮЛжУЮЂЗжЩшЮЊЕчЮЛЦїПЬЖШ3ЃЌЮЛжУдівцКЭЫйЖШдівцЯШЩшЖЈдкНЯЕЭжЕПЬЖШ3ЃЌШЛКѓдкВЛВњЩњвьГЃЯьЩљКЭеёЖЏЕФЧАЬсЯТЃЌж№НЅдіМгЫйЖШдівцжСЩйгаеёЖЏдђдйМѕЩйПЬЖШЃЈ0.5~1ИёЃЉ 2ЃЉдіМгЮЛжУдівцжСЩйгаеёЖЏЁЃдйдіМгЮЛжУЮЂЗжжСЩйУЛгаЩюЖЌЁЃ 3ЃЉдіМгЮЛжУЧАРЁЪЙжЭКѓКЭГЌЕїзюаЁЁЃ 4ЃЉШчЙћЕчЛњдЫааЪБгаеёЖЏЃЌЪЪЕБМѕЩйЫйЖШдівцЁЃ 5ЃЉШчЙћЕчЛњЭЃжЙЪБгаеёЖЏЃЌЪЪЕБМѕЩйЮЛжУдівцЃЌЛђдіМгЮЛжУЮЂЗжЁЃ
ЖЫПкЫЕУї
ЕфаЭНгЯпЗНЪНПижЦаХКХЪфШы/ЪфГіЖЫПкX1
ЖЫзгКХ ЗћКХ УћГЦ ЫЕУї 1 PUL+ ТіГхе§ЪфШы ИпгааЇ 2 PUL- ТіГхИКЪфШы ЕЭгааЇ 3 DIR+ ЗНЯђе§ЪфШы ИпгааЇ 4 DIR- ЗНЯђИКЪфШы ЕЭгааЇ 5 ERC+ ЫХЗўИДЮЛе§ЪфШы ИпгааЇ 6 ERC- ЫХЗўИДЮЛИКЪфШы ЕЭгааЇ 7 ALM БЈОЏЪфГіаХКХ МЏЕчМЋЪфГі 8 EGND БЈОЏЪфГіЕи МЏЕчМЋЪфГіЕи ЙІТЪЖЫПкX3
ЖЫзгКХ ЗћКХ УћГЦ ЫЕУї 1 S+ ЕчЛњS+ЖЫзг ЕчЛњЕчЪр 2 S- ЕчЛњS-ЖЫзг ЕчЛњЕчЪр 3 VDC ЪфШыжБСїЕчдД 4 GND ЪфШыЕчдДЕи
АВзАГпДч
БрТыЦїЗДРЁаХКХЪфШыЖЫПкX2
ЖЫзгКХ ЗћКХ УћГЦ ЫЕУї 1 GND ЪфГіЕчдДЕи 2
PB- БрТыЦїBЯрИКЪфШы 3 PB+ БрТыЦїBЯре§ЪфШы ЕЅЖЫСЌНг 4 PA- БрТыЦїAЯрИКЪфШы 5 PA+ БрТыЦїAЯре§ЪфШы ЕЅЖЫСЌНг 6 VCC ЪфГіЕчдД
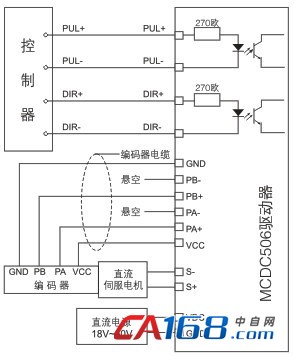
жБСїЫХЗўЯЕЭГЕФЕфаЭНгЯпЭМШчЯТЃК
Ч§ЖЏЦїПЩвдЯђБрТыЦїЬсЙЉ+5VЃЌзюДѓ80mAЕФЕчдДЁЃВЩгУЫФБЖЦЕЕФМЦЫуЗНЪНЃЌБрТыЦїЗжБцТЪГЫ4ОЭЪЧЫХЗўЕчЛњУПзЊЕФТіГхЪ§ЁЃA.ЕББрТыЦїЪЧВюЗжНгЯпЗНЪНЪБЃЌНгЯпЭМШчЯТЫљЪО B.ЕББрТыЦїЪЧЕЅЖЫНгЯпЗНЪНЪБЃЌНгЯпЭМШчЯТЭМЫљЪО 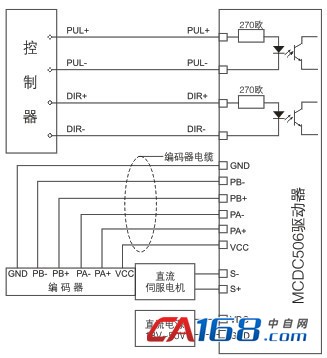




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл