



ЙЄзїЕчбЙ18-50VDCЃЌЪфГіЕчСїжЕ6A(RSM),ЗхжЕ18A,ПЩЧ§ЖЏ32-200WЫХЗўЕчЛњЃЛ
ПЩНгЪеВюЗжКЭЕЅЖЫЪНТіГх/ЗНЯђжИСю,ПЩНгЪеЕЅТіГхЃЈТіГх+ЗНЯђЃЉЛђЫЋТіГхЃЈCM+CCWЃЉПижЦжИСюЃЛ
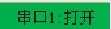
здЖЏЖСШЁЧ§ЖЏЦїЕФЕБЧАЕФдЫааВЮЪ§ЃЛ
ОпгаОпгаащЪОВЈЦїЃЌПЩвдЪЕЪБЯдЪОЕчЛњдЫааЕчСїЁЂдЫааЫйЖШЁЂЖЏЬЌИњзйЮѓВюЕШВЮЪ§ЕФЧњЯпЃЛ
ПЩЩшжУЮЛжУЛЗЁЂЫйЖШЛЗЁЂЕчСїЛЗЕШЕФPIDВЮЪ§ЃЛ
ПЩЩшжУЕчзгГнТжБШЃЌзюДѓжЕЮЊ1/255жС255,ПЩЩшжУЯЕЭГБрТыЦїЕФЯпЪ§,ПЩЩшжУЯЕЭГЕФзюДѓИњзйЮѓВюЃЛ
ПЩЩшжУФкжУЫйЖШЬнаЮВЈВтЪдФЃЪНЃЌАќРЈзюИпдЫааЫйЖШЁЂМгЫйЖШЁЂМфаЊЪБМфЁЂдЫааЕФааГЬЁЂжиИДДЮЪ§ЕШЃЌдкаЉВтЪдФЃЪНгУЛЇПЩЙлВтЯЕЭГдЫааЪЧЗёТњзувЊЧѓЃЛ
ПЩЖСШЁЧ§ЖЏЦїЕФзюаТРњЪЗЙЪеЯКЭЙЪеЯЕФЧхГ§ЃЛ
ВЩгУЙтИєММЪѕКЭЙ§бЙЁЂЙ§СїЁЂШБЯрЁЂГЌВюЁЂБрТыЦївьГЃЕШБЃЛЄЙІФмЁЃ
ШэМўЬиад
зЂвтЃКЕїЪдЙ§ГЬжаШчгіЕНЬиЪтЧщПіашвЊНєМБЭЃГЕАДF1Мќ
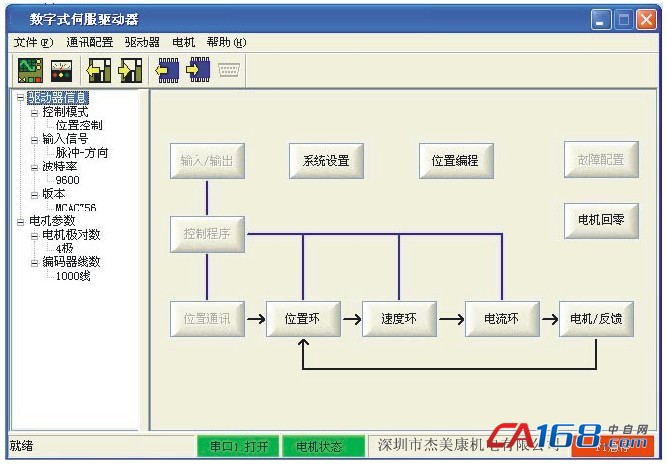
Prem TunerЪ§зжЫХЗўЧ§ЖЏЦїЕїНкШэМўОпгаЯЕЭГдХфЁЂPIDВЮЪ§ЕїНкЁЂВЈаЮВЩМЏЁЂдЫЖЏПижЦЕШЙІФмЃЌШэМўПижЦНчУцШчЯТЭМЃК
 |
ХфжУЭЈбЖЖЫПк 1ЃЌЯЕЭГФЌШЯЕФЖЫПкЮЊCOM2ЃЌВЈЬиТЪЮЊ9600 |
ЕчЛњХфжУ
 ЭЈбЖе§ГЃЃЌЕчЛњВЮЪ§ХфжУКУКѓЃЌЕчЛњБуПЩвде§ГЃЕФдЫзЊЁЃ |
|

 ЭМбљЃЌВЂЖСШЁЧ§ЖЏЦїЕФЩшжУЕННчУцЁЃ
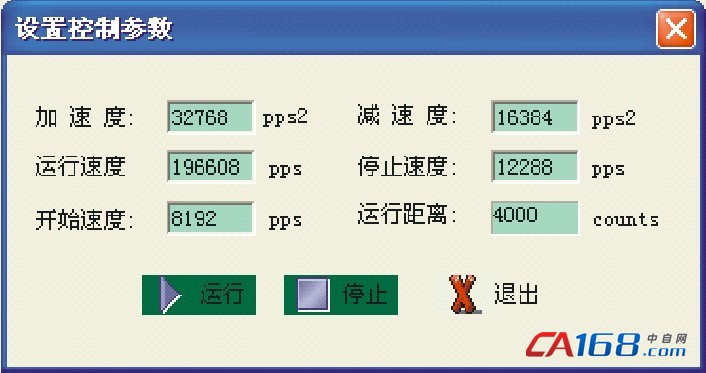
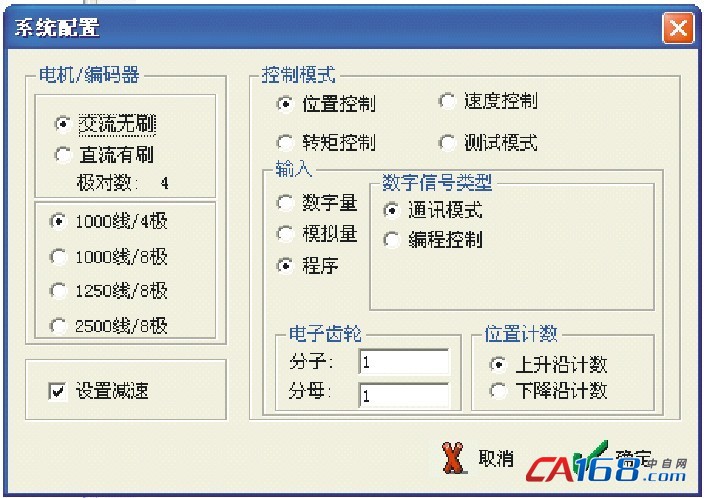
ЭМбљЃЌВЂЖСШЁЧ§ЖЏЦїЕФЩшжУЕННчУцЁЃ1ЃЌПижЦФЃЪНЕФРраЭгаЃКЮЛжУПижЦФЃЪНЃЌЫйЖШПижЦФЃЪНЃЌзЊОиПижЦФЃЪНЃЌВтЪдФЃЪНЁЃВЛЭЌЕФПижЦФЃЪНгаВЛЭЌЕФаХКХЪфШыРраЭЁЃ
2ЃЌИљОнЫљашвЊЕФПижЦЗНЪНКЭаХКХдДРраЭЃЌПЩвддк“ЯЕЭГХфжУ”ЖдЛАПђжаЩшжУКУЯргІЕФПижЦФЃЪНКЭаХКХРраЭЁЃЩшжУКУПижЦФЃЪНКЭЪфШыаХКХРраЭКѓЃЌЪфШыЯргІЕФаХКХЃЌЕчЛњОЭПЩвддЫзЊЦ№РДСЫЁЃ
3ЃЌЮЛжУПижЦФЃЪНЯТЃЌЛЙПЩвдЩшжУЕчзгГнТжЕФЗжзгЗжФИЃЌЮЛжУМЦЪ§ЗНЪНЁЃЫйЖШзЊОиПижЦЪБЃЌЛЙПЩЩшжУЯргІЕФЫРЧјЁЂЦЋвЦСПМАВЩбљТЪФЃЪНЁЃ
4ЃЌЖдгкЮЛжУЁЂЫйЖШЁЂзЊОиПижЦЕФЭЈбЖФЃЪНЃЌПЩвддкжїНчУцЩЯЕФЗжБ№ЕуЛї“ЮЛжУПижЦ”ЁЂ“ЫйЖШПижЦ”ЁЂ“зЊОиПижЦ”НјааЯргІЕФЖдЛАПђЁЃ
5ЃЌЖдгкЮЛжУПижЦФЃЪНЃЌПЩвдЩшжУдЫЖЏЕФЦ№ЪМЫйЖШЁЂМгЫйЖШЁЂдЫааЫйЖШЁЂМѕЫйЖШЁЂМѕЫйЖШЁЂдЫааОрРыЕШВЮЪ§ЁЃ
6ЃЌЖдгкЫйЖШПижЦФЃЪНЃЌПЩвдЩшжУдЫааЕФЫйЖШЃЌе§ИККХБэЪОдЫзЊЗНЯђЁЃ
7ЃЌЖдгкзЊОиПижЦФЃЪНЃЌПЩвдЩшжУдЫааЪБЕФзЊОиЕчСїЃЌе§ИККХБэЪОдЫзЊЗНЯђЁЃ
8ЃЌЩшжУКУЕФЭЈбЖВЮЪ§ЃЌЕчЛњВЮЪ§ЃЌЧ§ЖЏЦїВЮЪ§ЛсЯдЪОдкжїНчУцЕФзѓБпЕФЪїаЮЯдЪОРИжаЁЃ
дЫЖЏПижЦЙІФмМАПьЫйЕїЪд
|
|
 дЫааОрРыЪфШыПђжаЪфШые§Ъ§БэЪОе§зЊЃЌЪфШыИКЪ§БэЪОЗДзЊ PIDВЮЪ§ЕФЕїећЗНЗЈ |
|

| ПижЦаХКХЪфШы/ЪфГіЖЫПкX1 | БрТыЦїЗДРЁаХКХЪфШыЖЫПкX2 ЃЈD15ФИЭЗЃЉ | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ПижЦаХКХЪфШы/ЪфГіЖЫПкX11ЃЈ4еызљдкАхЩЯЃЉ | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ЙІТЪЖЫПкX3 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ЕфаЭНгЯпЭМ | АВзАГпДч |
БОЧ§ЖЏЦїПЩвдЯђБрТыЦїЬсЙЉ+5VЃЌзюДѓ80mAЕФЕчдДЃЌВЩгУЫФБЖЦЕЕФМЦЪ§ЗНЪНЃЌБрТыЦїЗжБцТЪГЫЫФОЭЪЧЫХЗўЕчЛњУЛзЊЕФТіГхЪ§ЁЃ 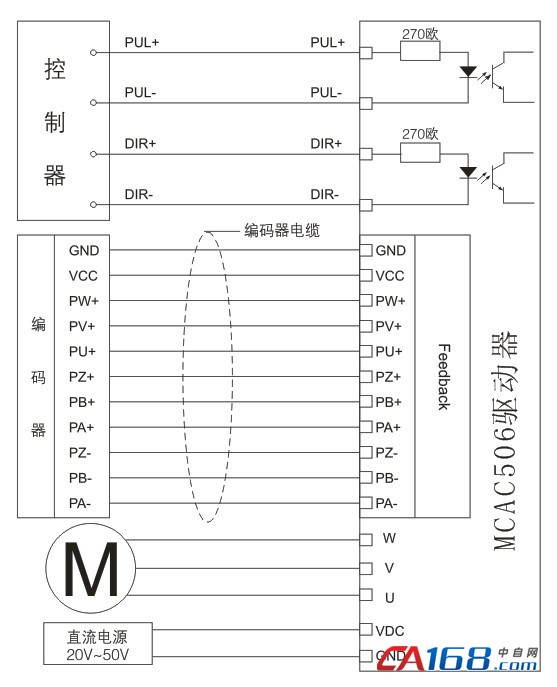 |
  |




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл