



- MCAC808ЯЕСаШЋЪ§зжНЛСїЫХЗўЧ§ЖЏЦїВЩгУзюаТ32ЮЛDSPПижЦММЪѕЩшМЦЩњВњЕФЕЭГЩБОШЋБеЛЗШЋЪ§зжНЛСїЫХЗўЧ§ЖЏЦїЁЃАќРЈШ§ИіЗДРЁЛиТЗ
- (ЮЛжУЛиТЗЁЂЫйЖШЛиТЗвдМАЕчСїЛиТЗ)ЁЃПЩвдЙЄзїдкЮЛжУЃЌЫйЖШКЭзЊОиФЃЪНЃЌПЩНтОіВННјЕчЛњМгЫйТ§ЁЂИпЫйСІОиаЁЁЂЗЂШШЁЂдывєЕШЮЪЬтЁЃ
- ЪЪКЯгкВННјЩ§МЖВњЦЗЕФИФдьЃЌШУгУЛЇвдНгНќВННјЯЕЭГЕФМлИёЯэЪмЕННЛСїЫХЗўМЖЕФадФм
- MCACЯЕСаЬхЛ§аЁЧЩЁЂАВзАЗНБуЁЂПЩППадИпЁЂЕїЪдМђЕЅЁЃ
- ЪЪКЯЧ§ЖЏЕчбЙDC24-80VЙІТЪдк400WвдЯТЕФНЛСїЫХЗўЕчЛњЁЃ
ЫХЗўЯЕЭГЕФВЮЪ§ЕїећКЭЩшжУЃЈЕуЮЛЦїФцЪБеыЕїЪБжЕМѕЩйЃЌЫГЪБеыЕїЪБжЕдіДѓЃЉ
AЃКЧ§ЖЏЦїЕчТЗАхЩЯвЛИі7ЮЛЕФDIPПЊЙиЃЌЦфжа1-3КХЮЛжУгУРДЩшЖЈзюДѓЕчСїЁЃЮЊЖюЖЈЕчСїЕФ2.5БЖЃЌ4-7КХЮЛжУзіЙЄзїФЃЪНЩшжУЁЃ
B:ЕчЮЛЦїЩЯга11ИіПЬЖШЃЌФцЪБеыЕїЕНЭЗЮЊ0ЃЌЫГЪБеыЕїЕНЭЗЮЊ10ЃЌжаМфЮЊ5.ЖюЖЈЕчСїRMS(A) SW1 SW2 SW3 ФЃЪНЩшжУ SW4 SW5 SW6 1.8 off off off ЮЛжУФЃЪНТіГх/ЗНЯђ off off off 2.6 on off off ЭЌЩЯЕЋЗНЯђЗДзЊ off off on 3.5 off on off ЫйЖШФЃЪН on off off 4.4 on on off СІОиФЃЪН off on off 5.3 off off on ЮЛжУФЃЪНе§ТіГх/ИКТіГх on on off 6.2 on off on 7.1 off on on 8.0 on on on
ЫХЗўЯЕЭГАќРЈШ§ИіЗДРЁЛиТЗЁОЮЛжУЛиТЗЁЂЫйЖШЛиТЗвдМАзЊОиЃЈЕчСїЃЉЛиТЗЁПЁЃзюФкЛЗЕчСїЛиТЗЕФЗДгІЫйЖШзюПьЃЌжаМфЛЗНкЫйЖШЕФЗДгІЫйЖШБиаыИпгкзюЭтЛЗЛиТЗЁЃМйЪЙЮЊзёЪиДЫЙцдђЃЌНЋЛсдьГЩеёЖЏЛђЗДгІВЛСМЁЃЫХЗўЧ§ЖЏЦїЕФЩшМЦПЩШЗБЃЕчСїЛиТЗОпБИСМКУЕФЗДгІаЇФмЁЃ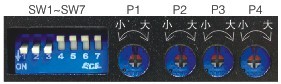
P1: ЮЛжУЧАРЁЕїНк P2: ЮЛжУБШР§дівцЕїНк P3: ЮЛжУЮЂЗжЕїНк P4: ЫйЖШБШР§дівцЕїНк
гУЛЇжЛашвЊЕїећЮЛжУЛиТЗгыЫйЖШЛиТЗВЮЪ§ЁЃЯЕЭГИїВЮЪ§здМьзмЪЧЯрЛЅжЦдМЕФЃЌШчЙћжЛгаЮЛжУЛиТЗдівцдіМгЃЌЮЛжУЛиТЗЪфГіЕФжИСюПЩФмБфЕУКмВЛЮШЖЈЃЌвджСећИіЫХЗўЯЕЭГЕФЗДгІПЩФмБфЕУВЛЮШЖЈЁЃЭЈГЃПЩВЮееЯТСаВНжшЖдЯЕЭГНјааЕїећЁЃ
дкећИіЯргІЮоГЌЕїЃЌЮоеёЖЏЕФЧАЬсЯТЃЌгІНЋЮЛжУдівцЩшЕНзюДѓЁЃЫцКѓЖдЫйЖШдівцМАЮЛжУЧАРЁЁЂЮЛжУЮЂЗжНјааЮЂЕїЃЌевЕНзюМбжЕЁЃ1ЃЉНЋЮЛжУЧАРЁКЭЮЛжУЮЂЗжЩшЮЊЕчЮЛЦїПЬЖШ3ЃЌЮЛжУдівцКЭЫйЖШдівцЯШЩшЖЈдкНЯЕЭжЕПЬЖШ3ЃЌШЛКѓдкВЛВњЩњвьГЃЯьЩљКЭеёЖЏЕФЧАЬсЯТЃЌж№НЅдіМгЫйЖШдівцжСЩйгаеёЖЏдђдйМѕЩйПЬЖШЃЈ0.5~1ИёЃЉ 2ЃЉдіМгЮЛжУдівцжСЩйгаеёЖЏЁЃдйдіМгЮЛжУЮЂЗжжСЩйУЛгаЩюЖЌЁЃ 3ЃЉдіМгЮЛжУЧАРЁЪЙжЭКѓКЭГЌЕїзюаЁЁЃ 4ЃЉШчЙћЕчЛњдЫааЪБгаеёЖЏЃЌЪЪЕБМѕЩйЫйЖШдівцЁЃ 5ЃЉШчЙћЕчЛњЭЃжЙЪБгаеёЖЏЃЌЪЪЕБМѕЩйЮЛжУдівцЃЌЛђдіМгЮЛжУЮЂЗжЁЃ
ЖЫПкЫЕУї
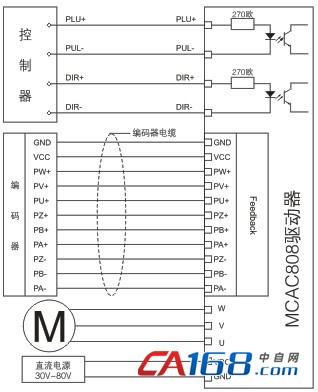
ПижЦаХКХЪфШы/ЪфГіЖЫПкX1 БрТыЦїЗДРЁаХКХЪфШыЖЫПкX2ЃЈD15ФИЭЗЃЉ ЖЫзгКХ ЗћКХ УћГЦ ЫЕУї 1 DIR+ ЗНЯђе§ЪфШы ИпгааЇ 6 DIR- ЗНЯђИКЪфШы ЕЭгааЇ 2 PUL+ ТіГхе§ЪфШы ИпгааЇ 7 PUL- ТіГхИКЪфШы ЕЭгааЇ 3 ERC+ ЫХЗўИДЮЛе§ЪфШы ИпгааЇ 8 ERC- ЫХЗўИДЮЛИКЪфШы ЕЭгааЇ 5 ALM БЈОЏЪфГіаХКХ МЏЕчМЋЪфГі 4 INPOS ЕНЮЛЪфГіаХКХ МЏЕчМЋЪфГі 9 EGND ЪфГіЕи МЏЕчМЋЪфГіЕи ЖЫзгКХ ЗћКХ УћГЦ ЫЕУї 1 GND ЪфГіЕчдДЕи 2 VCC ЪфГіЕчдД 50КСАВ 3 PW+ ДХМЋWЯре§ЪфШы ЕЅЖЫСЌНг 4 PV+ ДХМЋVЯре§ЪфШы ЕЅЖЫСЌНг 5 PU+ ДХМЋUЯре§ЪфШы ЕЅЖЫСЌНг 6 PZ+ БрТыЦїZЯре§ЪфШы 7 PB+ БрТыЦїBЯре§ЪфШы 8 PA+ БрТыЦїAЯре§ЪфШы 9 10 PW- БрТыЦїWЯрИКЪфШы 11 PV- БрТыЦїVЯрИКЪфШы 12 PU- БрТыЦїUЯрИКЪфШы 13 PZ- БрТыЦїZЯрИКЪфШы 14 PB- БрТыЦїBЯрИКЪфШы 15 PA- БрТыЦїAЯрИКЪфШы ЙІТЪЖЫПкX3 ЖЫзгКХ ЗћКХ УћГЦ 1 W ЕчЛњWЖЫзг 2 V ЕчЛњVЖЫзг 3 U ЕчЛњжБСїЕчдД 4 GND ЪфШыЕчдДЕи - ЕфаЭНгЯпЭМ АВзАГпДч




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл