



ШпгрЖШЛњЦїШЫдЫЖЏбЇ/ЖЏСІбЇЫуЗЈ
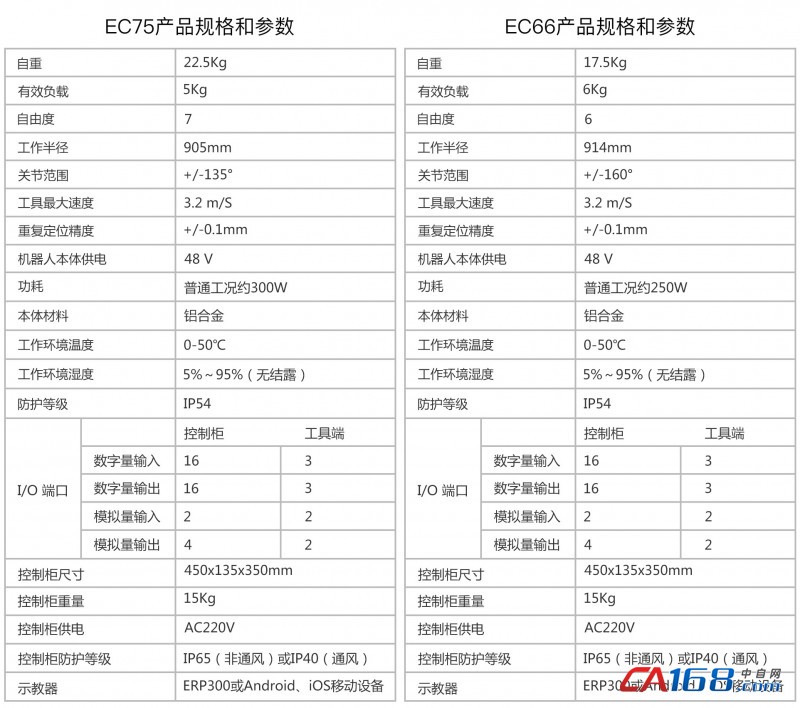
EC75ЪЧвЛПюШпгрЖШ7жсЛњЦїШЫЃЌгы6жсМАвдЯТЛњЦїШЫЯрБШПЩЪЕЯжИќСщЛюИДдгЕФЮЛзЫЁЂЮЛаЮПижЦЃЌгыШЫЕФЪжБлОпгаЯрЭЌСщЛюЖШЁЃАЌРћЬиЛљгкЫйЖШ/МгЫйЖШЕФбХПЫБШОиеѓ/ЗЖЪ§зюгХЗНЗЈЕФ7жсдЫЖЏбЇЫуЗЈЃЌЭЈЙ§жЦЖЈКЯРэЕФгХЛЏКЏЪ§/ШЈКЏЪ§РДЪЕЯжеыЖдаЇТЪЁЂФмСПЁЂАВШЋадЁЂШсЫГадЁЂБмеЯЕШИпНзашЧѓЕФЪЕЯжзлКЯЧѓНтЁЃ
0ПеМф/ЮЛзЫЮЛаЮЫЋФЃФцНтЫуЗЈ
0ПеМфжИБЃГжФЉЖЫЮЛзЫВЛБфЁЂжЛИФБфЛњЦїШЫЮЛаЮЃЌЪЧжЛгаШпгрЖШЛњЦїШЫВХОпгаЕФЬиЪтзјБъЯЕПеМфЃЌдкФтШЫЙцЛЎЕШгІгУжагаживЊвтвхЃЌЪЧЮЛзЫ/ЮЛаЮЫЋФЃФцНтЫуЗЈЕФЛљДЁЁЃЮЛзЫ/ЮЛаЮЫЋФЃФцНтЫуЗЈПЩвдЭЌЪБТњзуЮЛзЫКЭЮЛаЮЕФЛьКЯвЊЧѓЃЌЭЈЙ§ИУЫуЗЈПЩвдЭъШЋФЃФтШЫЪжБлЕФЖЏзїЃЌВЂЧвЯрБШШЫЪжБлПЩвдЪЕЯжИќзМШЗЁЂИќИпаЇЕФдЫЖЏЙьМЃЁЃ
АВШЋ/аЇТЪЫЋФЃЪН
EC75зїЮЊвЛПюазїЛњЦїШЫЃЌдкзЗЧѓАВШЋадЁЂжЧФмЛЏЕФЧАЬсЯТЃЌЮЊЪЪгІЪаГЁЕФашЧѓв§ШыАВШЋ/аЇТЪСНжждЫЖЏФЃЪНЃЌдкАВШЋФЃЪНжавдАВШЋгХЯШЃЌЖдећЛњЕФСІЁЂЫйЖШЁЂМгЫйЖШЁЂЖЏСПЁЂФмСПЕШЙиМќЮяРэСПНјааЯожЦЃЌДгЖјПижЦХізВЗЂЩњЪБЕФЮЃКІадЃЛЖјаЇТЪФЃЪННЋЭъШЋЗЂЛгERJЯЕСаЙиНкФЃПщХЄОиДѓЁЂЫйЖШИпЕФгХЕуЃЌПЩвдЬсЙЉДѓгк2.8m/SЕФзюДѓЙЄОпЯпЫйЖШЃЌНгНќДЋЭГЙЄвЕЛњЦїШЫЕФаЇТЪЃЌУїЯдгХгкЙњЭтВњЦЗЁЃ
APPЪОНЬЬхЯЕ
ЪЙгУЭЈгУЩЬвЕвЦЖЏЖЫЩшБИЃЌШчжЧФмЪжЛњЁЂPADЕШЃЌДњЬцДЋЭГЕФгаЯпзЈгУЪОНЬЦїЃЌЪЧЛњЦїШЫаавЕГЄОУвдРДЕФдИЭћЃЌвВЪЧЮДРДЕФЗЂеЙЧїЪЦЁЃЛљгкEC75ЕФжїЖЏ/БЛЖЏАВШЋЬиадЃЌвдМАЧБаФбаОПЕФЮоЯпВйзїАВШЋЬхЯЕЃЌАЌРћЬиНЋДЫММЪѕЪЕгУЛЏЁЃEC75ЕФЪОНЬAPPПЩдЫаагкAndroidКЭiOSЦНЬЈЃЌПЩЭъШЋЪЕЯжДЋЭГЪОНЬЦїЕФЫљгаЙІФмЃЌВЂЛЙНЋЬсЙЉдЖГЬвЃПиЁЂдкЯпЪгЦЕажњЕШЖрЯюИЈжњЙІФмЁЃ
ARЪОНЬЬхЯЕ
дкAPPЪОНЬЕФЛљДЁЩЯЃЌАЌРћЬигыARЩшБИГЇЩЬКЯзїЃЌТЪЯШдкЩЬвЕЛЏЛњЦїШЫВњЦЗжагІгУARЪОНЬММЪѕЁЃЭЈЙ§дЫаагкARЩшБИЩЯЕФAPPМАЩуЯёЭЗЁЂЪжЪЦЪЖБ№ЕШНгПкНјвЛВНЬсИпЪОНЬаЇТЪЁЃ




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл