


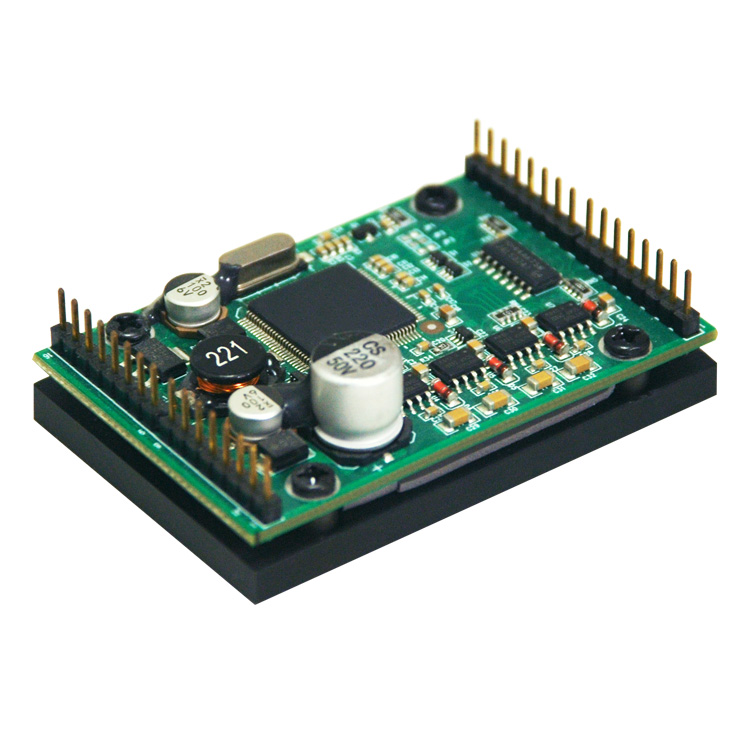
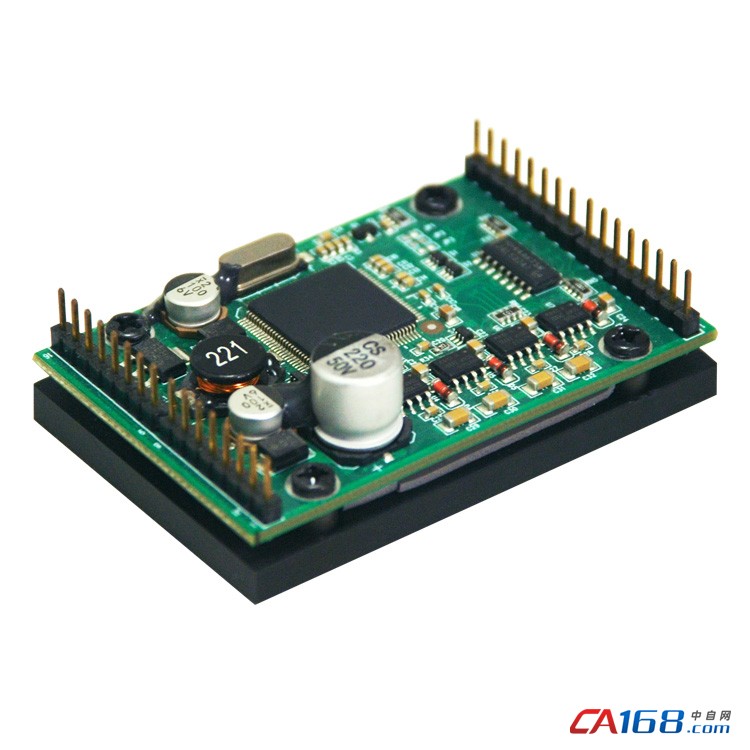
PIMЯЕСаЮЂаЭПЩБрГЬжБСїЫХЗўЧ§ЖЏЦїВЩгУВхШыЪННсЙЙЃЌвзгкПЭЛЇЯЕЭГгВМўвЛЬхЛЏЁЃ**ЙІТЪПЩДя180WЃЌЭЈЙ§IDMЯЕСаШэМўЙЄОпЃЌФмдкЭЌвЛШэМўЦНЬЈЩЯЮЊЭбРыжїЛњдЫааЃЈStand-aloneЃЉЛђЗжВМЪНЭјТчдЫЖЏПижЦгІгУЬсЙЉвЛИіИпЖШСщЛюЁЂЖрЙІФмЁЂМђЕЅХфжУЁЂЭМаЮЛЏдЫЖЏПижЦБрГЬЕФРэЯыНтОіЗНАИЁЃ
жївЊЬиадЃК
| ЫХЗўЧ§ЖЏЦїЯЕСа | PIMЯЕСаПЩБрГЬжБСїЫХЗўЧ§ЖЏЦї |
| Ч§ЖЏЕчЛњ | ЮЂаЭжБСїгаЫЂЁЂжБСїЮоЫЂЁЂгРДХЭЌВНЃЈЪИСППижЦ ) ЁЂЮоЫЂжБЯпЁЂ 2/3 ЯрВННјЕчЛњ |
| ЭтЙлНсЙЙ | ЮЂаЁЬхЛ§,ВхШыЪНЩшМЦ(64x42x11mm) |
| ПижЦФЃЪН | ЮЛжУЁЂЫйЖШЁЂСІОи |
| ВйзїФЃЪН | ЕЅжсЛђЖржсЃЈ Master/SlaveЃЌПЩДя256ИіЃЉЃЌЭбЛњдЫааЃЈ Standalone ЃЉ |
| дЫЖЏФЃЪН | ПЩБрГЬ T аЭЛђ S аЭЫйЖШЮЛжУЧњЯпЁЂЕчзгГнТжЁЂЕчзгЭЙТжЁЂ PT/PVT ЁЂЭтВППижЦЁЂЖрИіЪТМўДЅЗЂЕШ |
| ПижЦУќСю | RS232/CAN ЭЈаХУќСюЁЂТіГх+ЗНЯђЁЂ0-5V(±10VПЩбЁ)ФЃФтСПЪфШыЁЂI/O ЪфШы |
| ЭЈаХЭЈЕР | RS232,CAN2.0B(ЙтИєЃЌ ПЩДя 1MBit/s) |
| ПЩбЁЗДРЁ | ЛєЖћДЋИаЦї+діСПБрТыЦїЃЌЛђНігадіСПБрТыЦїЃЌЛђЯпадЛєЖћДЋИаЦї |
| ПЩБрГЬЪ§зж I/O гы ФЃФтСПЪфШы |
4ИізЈгУЪ§зжЪфШыЃЈЪЙФмЁЂТіГх+ЗНЯђЁЂзѓгвЯоЮЛЃЉ 2ИіПЩБрГЬИпЫйЪ§зжВюЗжЪфШыЃЌПЩХфжУЮЊТіГх&ЗНЯђЛђБрТыЦїИњЫцA,BаХКХЪфШы 2ИіЪ§зжЪфГі 2Иі0-5V(+-10VПЩбЁЃЉФЃФтСПЪфШыДјФкВПТЫВЈ |
| БЃЛЄ | Й§СїЁЂЖЬТЗЁЂНгЕиЁЂЙ§бЙЁЂЧЗбЙЁЂI2tЁЂПижЦДэЮѓ |
бЁаЭБэЃК
| жБСїЧ§ЖЏЦїаЭКХ | ЙЉЕчЕчбЙ VDC(V) |
СЌајЕчСї Ic(A) |
ЗхжЕЕчСї Ip(A) |
ЪфГіЙІТЪ (W) |
ЭтаЮГпДч (mm) |
ЭЈаХРраЭ | Ч§ЖЏЕчЛњ | ПЩбЁЗДРЁ |
| PIM3605A | 12-36 | 5 | 16 | 180 | 64x42x11 | RS232 CAN |
гаЫЂ,ЮоЫЂ жБЯп,ВННј |
ЛєЖћ,діСП |
| PIM2403A | 12-28 | 3 | 6 | 70 | 64x42x11 | RS232 CAN |
гаЫЂ,ЮоЫЂ жБЯп,ВННј |
ЛєЖћ,діСП |




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл