



жївЊЬиадЃК
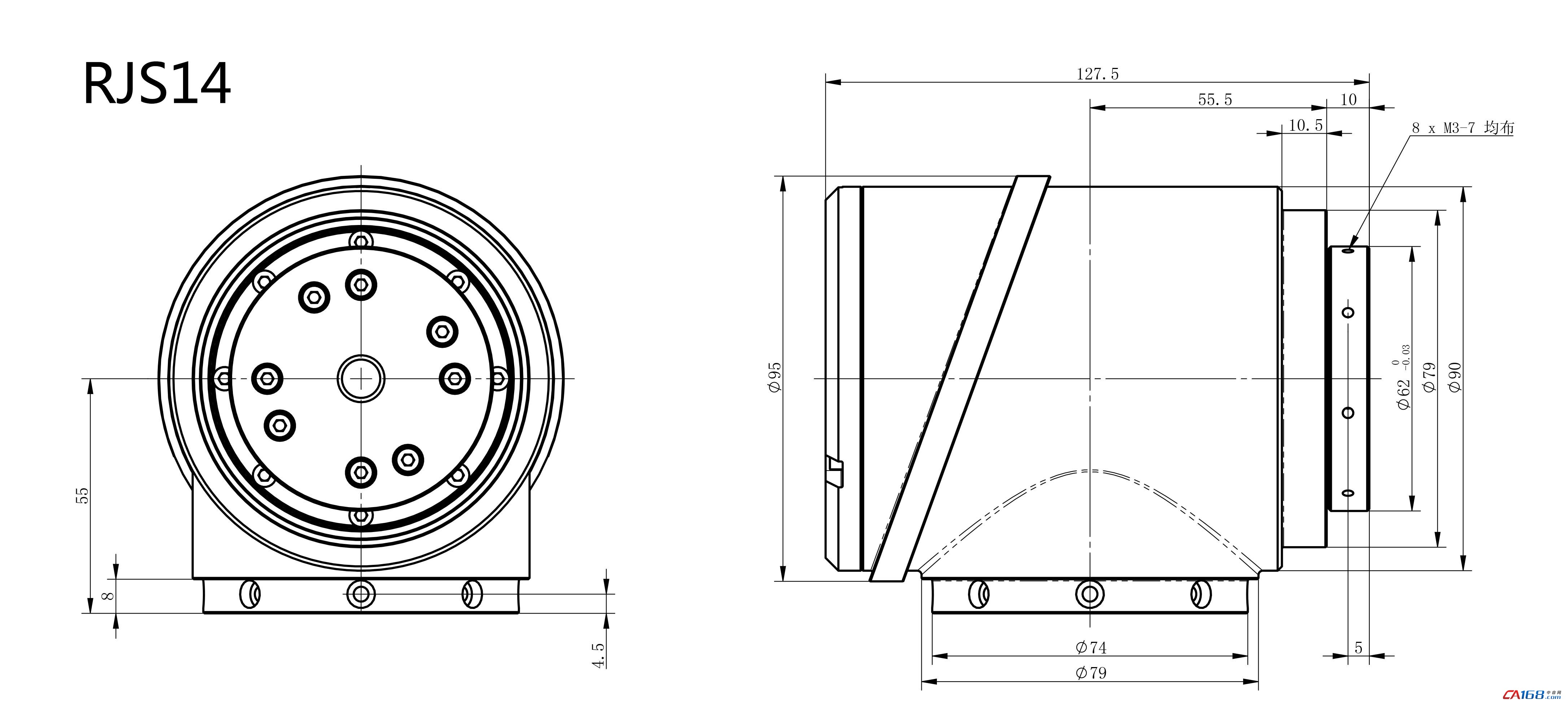
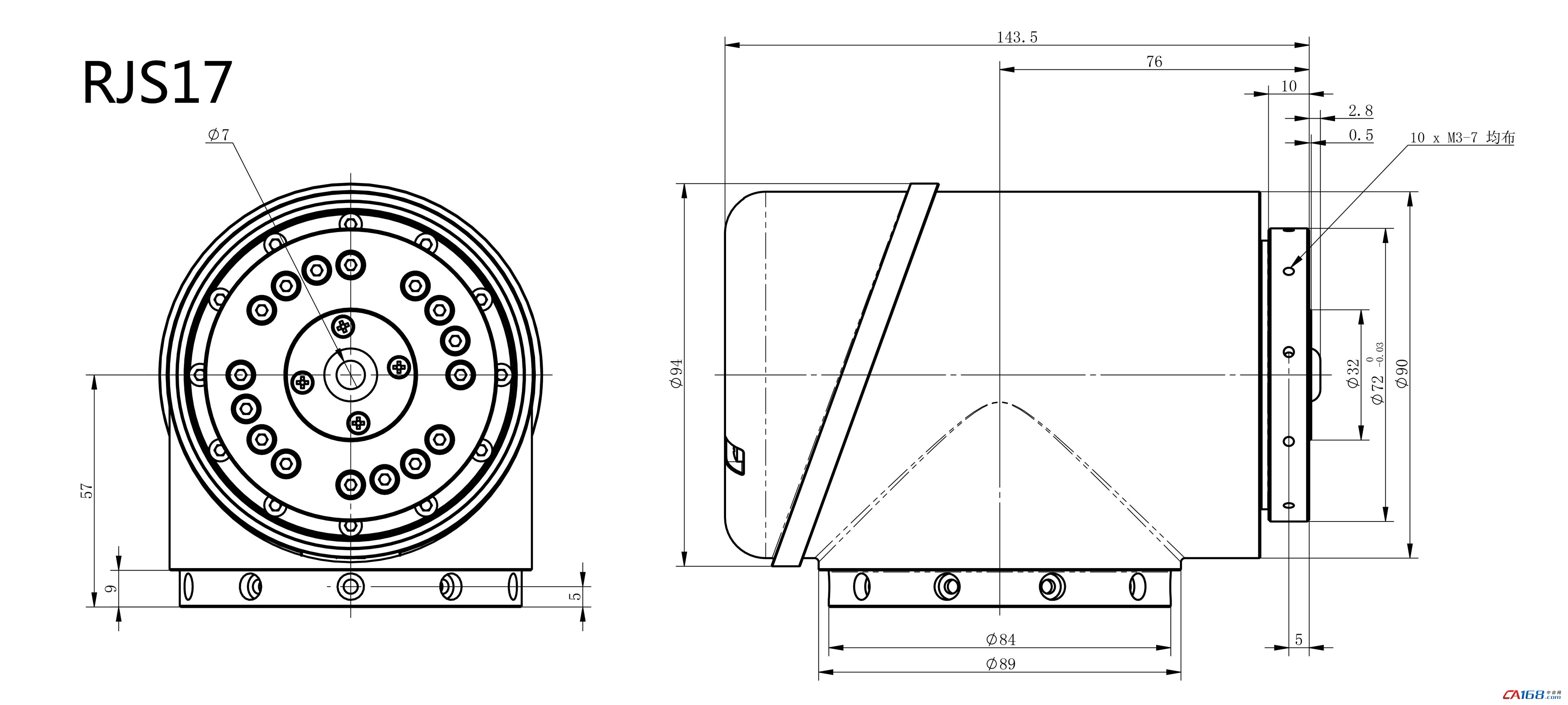
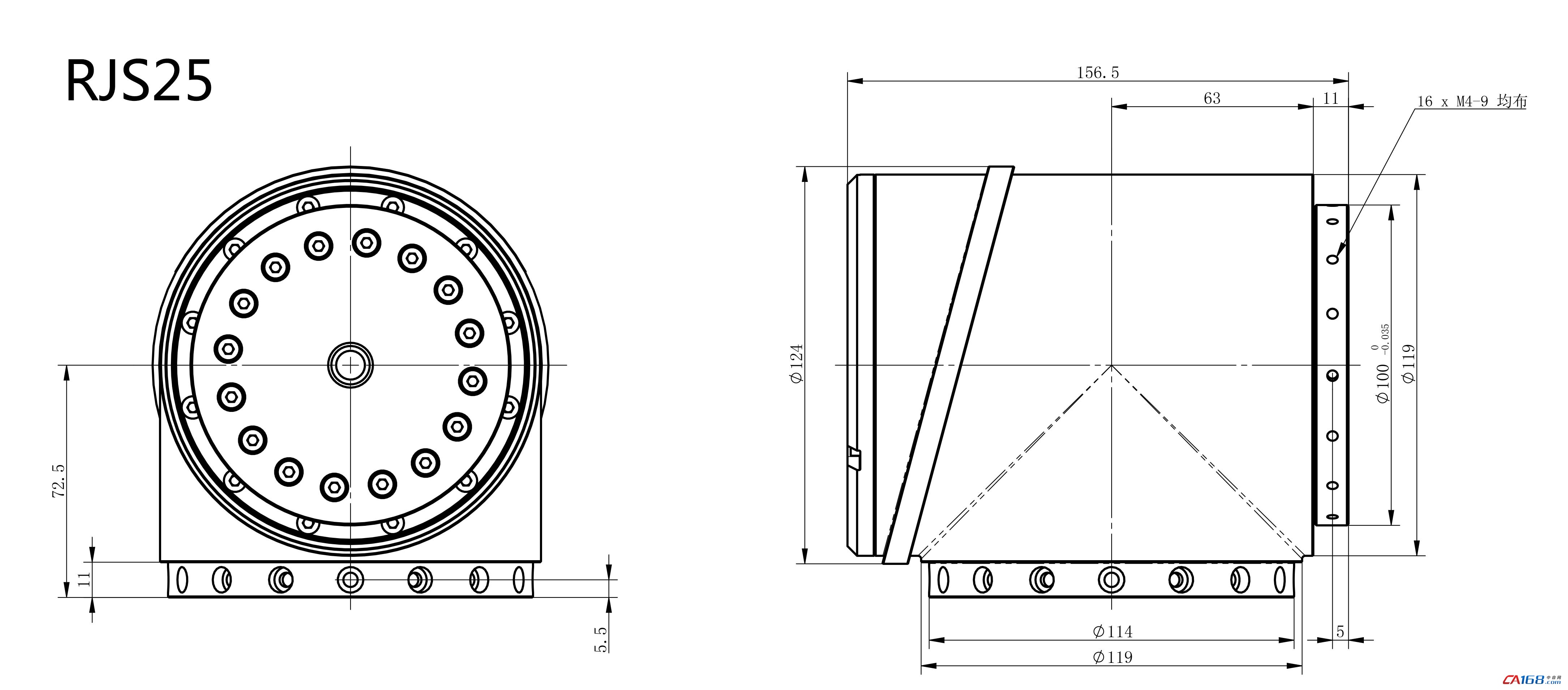
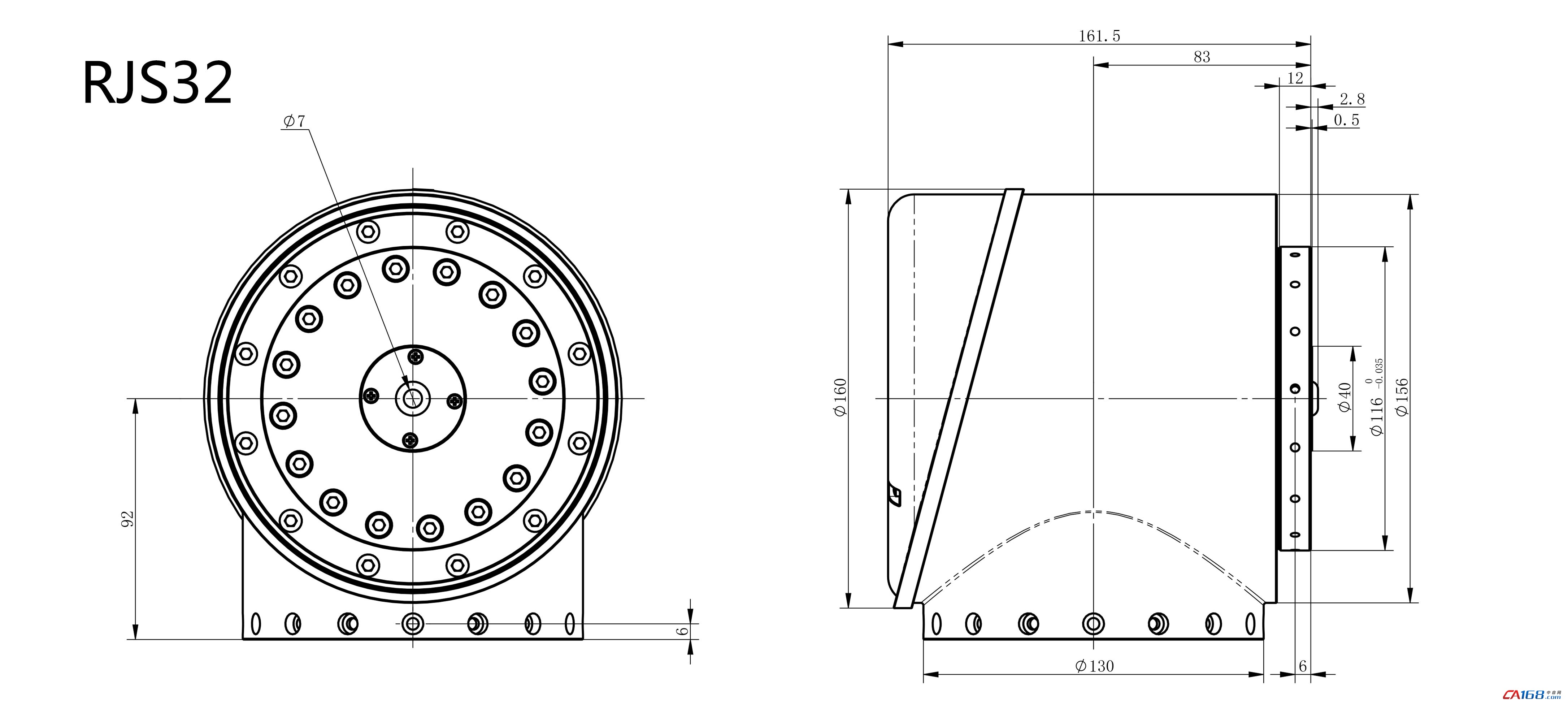
RJS14,17,20,25,32ЙиНкФЃзщПЩбЁ
ЪфГіСЌајХЄОиЮЊ10~200N.m
ЪЪгУгааЇИКдиаЁгк10ЙЋНявдЯТЕФазїЛњЦїШЫ
ЖюЖЈзЊЫйзюИпПЩДя40RPM,МгЫйЖШПЩДя10RPS/S
ЙиНкЪфГіЖЫжиИДЖЈЮЛОЋЖШИпДя0.001ЖШ
EtherCAT,CANopenЭЈаХПЩбЁЃЌжЇГжДѓВПЗжжїСїЛњЦїШЫПижЦЦї
ГЃЙцЮЊ48VDCЙЉЕчЃЌ24~60VDCжЎМфЙЉЕчПЩбЁ
НсЙЙМЋЦфНєДеЃЌзюаЁЙиНкНіЮЊ90x128mm,жиСП<2Kg
АВзАВ№аЖМђЕЅЁЂПьНн
вВЮЊПЭЛЇЬсЙЉOEMЖЈжЦЛЏЗўЮё
ЛњаЕДЋЖЏгыЕчЛњВЮЪ§ЙцИёЃК
| ВЮЪ§ | ЕЅЮЛ | RJS14 | RJS17 | RJS25 | RJS32 |
| МѕЫйЦїЫйБШ | -- | 100 | 100 | 100 | 100 |
| МѕЫйЦїГнЯЖ | arcsec | 18 | 10 | 9 | 7 |
| МѕЫйЦїБГЯЖ | arcmin | 1.5 | 1.5 | 1.5 | 1.5 |
| зЊЖЏОЋЖШ | arcmin | 2 | 2 | 1.5 | 1.5 |
| ЕчЛњМЋЖдЪ§ | -- | 6 | 6 | 8 | 8 |
| ЕчЛњЖюЖЈЙІТЪ | W | 117 | 146 | 380 | 430 |
| ЕчЛњЖюЖЈЕчбЙ | V | 48 | 48 | 48 | 48 |
| ЕчЛњЖюЖЈЕчСї | A | 4.5 | 4.7 | 11 | 16 |
| ЕчЛњЖюЖЈзЊЫй | rpm | 3500 | 3000 | 2500 | 2000 |
| ЕчЛњЖюЖЈзЊОи | Nm | 0.32 | 0.46 | 1.4 | 2.0 |
| ЕчЛњзЊОиГЃЪ§ | Nm/A | 0.069 | 0.115 | 0.13 | 0.13 |
| ЗДЕчЖЏЪЦЯЕЪ§ | V/krpm | 4.3 | 7.17 | 11.29 | 10 |
| ЙиНкжиСП | kg | 2 | 2.5 | 4.5 | 7.5 |
| ЙиНкжБОЖ | mm | 90 | 90 | 119 | 156 |
| ЙиНкИпЖШ | mm | 100 | 104 | 135 | 172 |
| ЙиНкГЄЖШ | mm | 128 | 144 | 157 | 162 |
| аэгУИКдизЊОи | Nm | 28 | 54 | 157 | 333 |
| ЦНОљИКдизЊОи | Nm | 11 | 39 | 108 | 216 |
| **ЫВЪБзЊОи | Nm | 54 | 86 | 284 | 647 |
| ЖюЖЈзЊЫй | rpm | 35 | 30 | 25 | 20 |
| **зЊЫй | rpm | 40 | 35 | 30 | 25 |
| діСПБрТыЦї | P/R | 2500 | 2500 | 2500 | 2500 |
| ОјЖджЕБрТыЦї | Bit | 17/19 | 17/19 | 17/19 | 17/19 |
АВзАГпДчЭтаЮЭМЃК




ЙВ0Ьѕ [ВщПДШЋВП] ЭјгбЦРТл