



1引言
步进电动机是工业控制中应用十分广泛的一种电动机。它的主要优点是,具有较高的定位精度,无位置积累误差,并且特有的开环运行机制,这大大减少系统成本,可以获得接近闭环控制的良好性能。但是,步进电动机运行工况存在许多不足之处,如低频振荡、噪声大、分辨率不高、驱动系统可靠性差等,又严重制约了步进电机的应用范围。为此,出现了各种旨在提高步进电机运行性能的驱动技术,如高低压驱动、调频调压驱动、斩波恒流驱动、细分驱动技术。根据混合式步进电动机的结构特点,将交流伺服控制方法引入混合式步进电机控制系统中,使其可以以任意步距角运行,显著改善步进电机的运行性能。本文正是借鉴了永磁交流伺服系统的控制方法,研制了基于DSP的三相混合式步进电机驱动器,运用空间矢量脉宽调制方法,使电机相电流的波形接近于正弦波,电流环闭环,极大的降低了步进电机的低频振荡和失步现象,获得接近于伺服电机的性能,具有很高的性价比[1]。
2脉冲细分驱动的原理
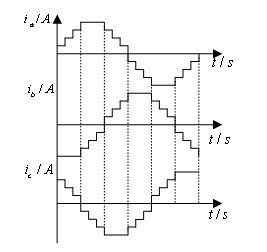
步进电机的驱动是通过轮流给步进电机的各相励磁绕组通以电流,实现步进电机内部磁场合成方向的变化来驱动步进电机,由于通过各相绕组的电流是个开关量,即绕组中的电流只有零和某一额定值两种状态,相应的各相绕组产生的磁场也是一个开关量,只能通过各相的通电组合来减小步距角,这样可达到的细分数很有限。因此,要使可达到的细分数较大,就必须能控制步进电机各相励磁绕组中的电流,使其按阶梯上升或下降,即在零到最大相电流之间能有多个稳定的中间电流状态,相应的磁场矢量幅值边就存在多个中间状态,这样相邻两相或多相的合成磁场的方向也将有多个稳定的中间状态,转子就沿着这些中间状态以微步距转动,这就是脉冲细分驱动的基本原理。图1为三相双六拍三细分的各相电流波形图[7]。由于各相电流是以1/3的幅度上升或下降的,原来一步所转过的角度将分三步完成,步距角等于不细分时的1/3。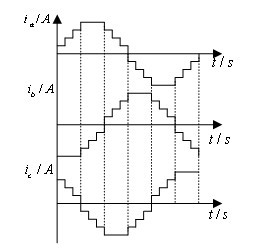
图1 三相双六拍三细分各相电流波形
当前步进电机脉冲细分有多种形式,最佳的控制方式是恒转矩等步距角细分[5][6]。对在空间上彼此相差2π/m的m相绕组分别通以相位上相差2π/m而幅值相等的正弦电流,则合成的电流矢量便在空间做均匀的旋转运动,且幅值保持基本不变,从而使输出转矩保持恒定,实现恒转矩输出。对于三相混合式步进电机,给其三相绕组分别通以幅值相等而空间位置上相差2π/3的正弦波电流,则合成的电流矢量将在空间做幅值恒定的旋转运动。
3三相混合式步进电机控制原理
3三相混合式步进电机控制原理
步进电机是一类高度非线性的电机,在满足实际工程要求的情况下可以建立比较理想的步进电机数学模型[2]。三相混合式步进电机坐标系示意图如图2所示。
图2 三相混合式步进电机坐标系示意图
图2中A、B、C为三相定子绕组的轴线,各相绕组的轴线在空间上相差120°。d轴表示转子磁场方向,q轴超前d轴90°,建立随转子同步旋转的坐标系。假设正电流产生正磁链,并采用电动机惯例选取电压与电流的正方向,则可得出电压方程:
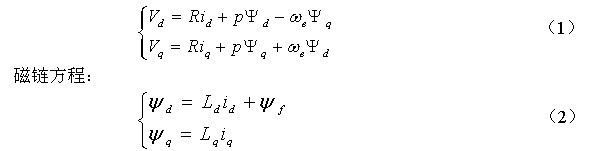
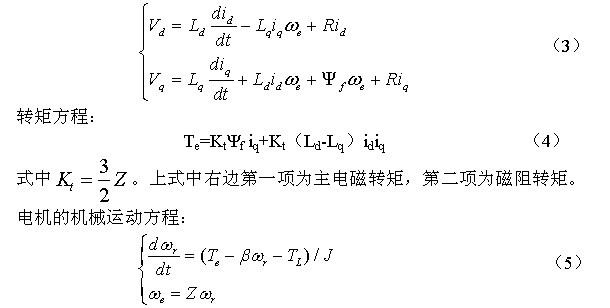
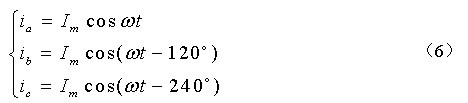
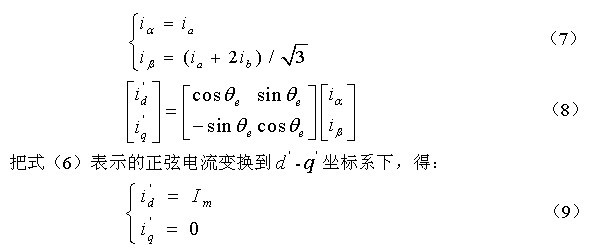

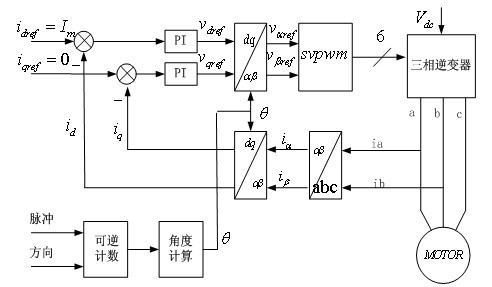
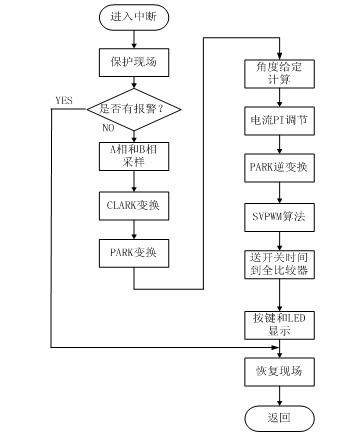
图5 中断程序流程图
5仿真与实验结果
5.1仿真结果
式中,Vd、Vq、id、iq、ψd、ψq分别为d-q轴上定子电压、电流和磁链分量;R为绕组电阻;Ld、Lq为d-q轴上的定子电感;ωe为转子旋转电角速度;ψf为永磁体对应的转子磁链;p=d/dt为微分算子。
式(2)代入式(1)得:
上式中,Te是电磁转矩,Z是步进电机的齿数,β是运动阻尼系数,TL是负载转矩,J是电机及负载的转动惯量,ωe为转子旋转的电角速度,ωr为电机转子的机械角速度。
步进电机一般运行在速度开环状态,没有速度传感器提供转子的位置信息,所以适用于永磁同步电机的转子磁场定向控制在步进电机中不易实现,本文把横轴定在三相定子电流合成矢量上,记为d′轴,纵轴以旋转方向超前d′轴90°,记为q′轴,建立一个与定子磁场同步旋转的d′- q′坐标系[3][4],且取初始时刻d′轴与A相轴线重合,则d′轴与A相夹角记为θe。当定子绕组通入三相正弦电流:
在(6)式中令ωt=θe,即初始时刻d′轴与A相绕组轴线重合。通过CLARK变换和PARK变换:
由已建立的三相混合式步进电机数学模型知道,在abc坐标系下按照式(6)或者在d′- q′坐标系下按照式(9)控制定子电流,则会产生匀速旋转磁场,带动转子旋转。为表示方便把式(9)中的i′d、i′q分别用id、iq替换则表示成下面的式(10),注意式(10)及本文后面出现的id、iq都是指定子磁场同步旋转d′- q′坐标系下的分量id、iq,与前面出现的id、iq(转子磁场定向坐标系下的分量)不同,另外本文后面出现的d-q坐标系,也是指定子磁场同步旋转坐标系d′- q′坐标系。
在d-q坐标系下控制id=常数、iq =0就能控制电机匀速旋转。三相混合式步进电机矢量控制的基本原理如图3所示。
图3 三相混合式步进电机控制框图
4三相混合式步进电机驱动系统的设计
4.1系统硬件
系统的硬件结构框图如图4所示,它由以IPM智能功率模块为核心的功率部分和以DSP(TMS320f28032)为核心的控制部分组成。功率部分主要由整流桥、滤波电容、三相逆变桥(IPM智能功率模块)和电源部分组成;控制部分主要由硬件过流检测电路、PWM驱动电路、控制信号接口电路、按键及数码管显示电路、保护电路组成。上位机发出的控制脉冲经过光耦隔离输出给步进电机驱动器,输入端和输出端实现了完全的电气隔离,输出信号对输入信号无影响,提高了系统的抗干扰能力,信号经过整形后送到DSP的EQEP(增强型正交编码脉冲),有控制程序进行处理,在断电时将控制矢量的角度θ写入EEPROM,以使再次上电时位置角度值不变。
按键及数码管显示电路用于设置步进电机的工作电流和控制过程中的细分数,及电流调节器的PI参数,以及监视电机工作状态和报警信息。
保护电路是在IPM发生故障(IPM过流、欠压)或硬件过流时,其故障信号输入到DSP的GPIO引脚,在定时器中断中检测该引脚电平状态,该引脚为高电平时,DSP将PWM输出引脚置为高阻态,使逆变器停止工作。
图4 三相混合式步进电机驱动系统硬件结构图
4.2系统软件
系统的软件由初始化程序、主程序和定时器下溢中断服务程序组成。初始化程序又包括系统初始化和变量初始化,系统初始化主要是对DSP各个外设进行初始化,包括初始化IO口、AD采样、定时器、串行外设接口SPI、EQEP、EPWM程序。变量初始化是指DSP读取EEPROM存储单元对转子位置角、电机工作电流、细分数、PI调节器参数进行的初始化。
主程序是个循环等待中断的过程,一旦中断发生,则转去执行中断程序。主程序包括EEPROM的读写控制程序,PI调节器参数刷新程序、掉电保护程序。
定时器下溢中断服务程序是软件设计的核心部分,中断程序流程图如图5所示,程序开始检测是否有报警信息,若发生报警则立即封锁PWM输出,使逆变器停止工作,然后对A、B两相电流进行采样,接着进行坐标变换、计算电流给定相位角、PI调节、坐标反变换、PWM调制输出PWM信号控制三相桥臂的通断,最后是按键操作和LED显示程序。
图5 中断程序流程图
5仿真与实验结果
5.1仿真结果
在前面理论分析基础上,应用MATLAB/SIMULINK仿真软件搭建三相混合式步进电机的仿真模型,对前面提出的控制方法进行仿真。仿真模型步进电机各参数取值如下:
Ld= Lq=45mH,Rs=2Ω,静态相电流I=3A,电机齿数Zr=50。逆变器上直流母线电压为310V。
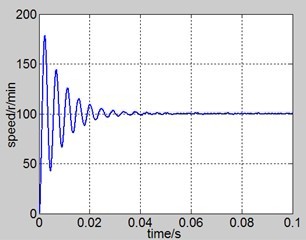
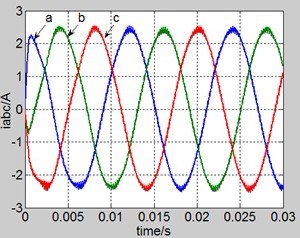
细分数为每转10000步,电机转速由所发的脉冲频率决定,这里以100r/min,空载为例进行仿真。由公式n=60f/Zr,得到电机相电流频率为f=83.3Hz,即周期T=12ms,仿真得到的转速波形(见图6)和一相相电流波形(见图7),由图可看出,在电机绕组中产生三相互差120°的正弦电流,电机转速稳定在100r/min。
细分数为每转10000步,电机转速由所发的脉冲频率决定,这里以100r/min,空载为例进行仿真。由公式n=60f/Zr,得到电机相电流频率为f=83.3Hz,即周期T=12ms,仿真得到的转速波形(见图6)和一相相电流波形(见图7),由图可看出,在电机绕组中产生三相互差120°的正弦电流,电机转速稳定在100r/min。
图6 仿真转速波形
图7 仿真三相电流波形
5.2实验结果
本系统实验采用的电机为华兴数控生产的三相混合式步进电机,电机参数如附表所示,细分数为10000,电机转速为100r/min,负载为0时,得到一相电流波形图如图8所示。由相电流波形可看出,电流周期T为12ms,与仿真结果相同,得到较为理想的正弦电流波形,实验过程中电机运行平稳,噪声较低,达到了良好的控制效果。附表三相混合式步进电机电机参数
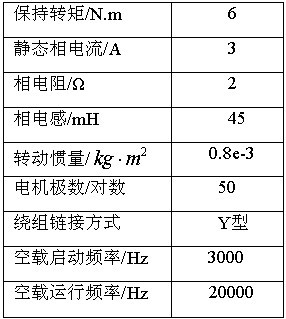
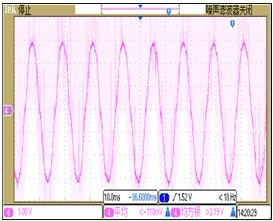
图8 100r/min一相电流波形图(横坐标每格代表10ms,纵坐标每格代表1A)
6结束语
本文参考永磁同步电机数学模型建立了三相混合式步进电机模型,采用矢量控制实现了步距角的高精度任意细分,根据控制方案研制了步进电机驱动器,设计了系统的硬件和软件,由于采用全数字式控制,软件实现了驱动器的绝大部分功能。通过仿真与实验结果可以看出,采用脉冲细分控制,可以有效的降低步进电机运行中的振动和噪声,改善步进电机的启动和运行性能。
作者简介
尹泉(1968-)男 副教授,研究方向为电力电子技术与传动控制、现代控制理论在电气传动控制中的应用。
涂敏(1986-)男 硕士研究生,就读于华中科技大学控制科学与工程系,研究方向为电力电子技术与传动控制、步进电机驱动系统。
参考文献
[1]付涛歧,吴玉国.基于DSP的三相混合式步进电机的SVPWM控制[J].机电产品开发与创新,2008, 21(4):142-144.
[2]钟宇明.全数字三相混合式步进电动机驱动系统[J].华中科技大学硕士学位论文,2004.
[3]Sheng-Ming Yang,Pei-Der Su.Active damping control of hybrid stepping motor.Power Electronics and Drive Systems,2001.Proceedings.,2001 4th IEEE International Conference on,Oct.2001:749-754.
[4]Mizutani.K,Hayashi.S,Matsui.N Modeling and Control of Hybrid Stepping Motors.Proc of 16thIEEE Industry Applications Society Conference.1993:289-294.
[5]王宗培,程智,任雷等.新型三相混合式步进电机系统[J].微电机,1998,31(2),3-5.
[6]史敬灼,徐殿国,王宗培等.两相混合式步进电机矢量控制伺服系统[J].电机与控制学报,2000,4(3):136-139.
[7]朱海民.基于DSP的三相混合式步进电机脉冲细分驱动系统[J].机电工程,2005,22(10):1-2.






共0条 [查看全部] 网友评论