


1引言
无人机具有体积小、重量轻、操作灵活、隐身性能好、适宜在恶劣环境下执行危险任务等特点,具有很高的军事应用价值,成为世界各国研究的热点。无人机在整个飞行过程中,主要包括起飞、空中飞行、着落等阶段,每个阶段都必须达到相应的技术指标才能保证整个飞行任务的顺利完成。目前,无人机的空中自主飞行技术已经相对成熟,而起飞和着陆仍是无人机技术中的两大难点。据统计,飞行事故中60%以上都是在飞机起飞和着落过程中发生的,其中又以着落事故为甚。因此,无人机的自主着陆技术是提高无人机安全性的关键,是无人机技术发展的重中之重。
本文针对无人机自主着陆控制技术,首先给出了无人机自主着陆控制系统的结构图,在只考虑直线航迹的情况下,设计了纵向控制回路以及横侧向控制回路的控制律;接着设计了一种基于待飞距离的着陆轨迹,将着陆轨迹划分为四个阶段:进场飞行段、直线下滑段、指数拉平段以及跑道滑行段,并针对各个阶段分别给出了纵向轨迹方程;最后在MATLAB环境下,对某低速型无人机的自主着陆过程进行了数字仿真,仿真结果表明本文提出的基于待飞距离的无人机着陆轨迹以及针对该着陆轨迹设计的控制律设计合理有效。
2自主着陆控制系统原理分析
自主着陆是指无人机依靠机载导航设备和飞行控制系统进行导航定位,控制无人机按照预设航线安全平稳降落在着陆场地的过程。为实现无人机在三维空间按预设航线飞行,将自主着陆部分分为纵向高度控制和横侧向航迹控制两部分进行设计。自主着陆控制系统结构如图1所示。
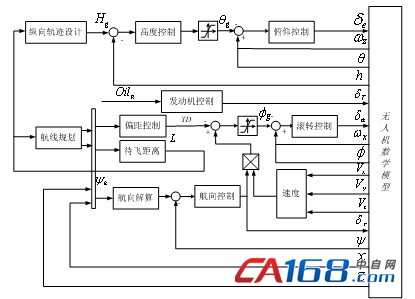
图1 某低速无人机自主着陆控制系统结构图
针对图1所示的着陆控制系统,本文提出的着陆控制方案如下:
●进入着陆模式前,提前足够距离对准航线;
●在着陆航线上预先设定一个航点称作着陆进入点,当无人机达到该点时,即认为无人机进入着陆模式;
●无人机纵向实时解算给定高度及当前高度之间的偏差,通过控制升降舵,油门舵消除高度偏差,实现无人机的高度控制;
●横侧向实时解算当前的侧向偏距,通过控制副翼舵和方向舵,消除侧向偏距以及航向偏差,保证着陆时滚转姿态平稳,航向对准跑道,最终实现无人机的精确自主着陆控制。
根据提出的着陆控制方案以及无人机,本文设计的纵向控制回路以及横向控制回路的控制律如下。
(1)纵向控制回路
纵向控制系统包括俯仰角控制内回路和高度控制外回路。
俯仰控制内回路将无人机保持在给定的俯仰角,由飞行控制计算机根据某种飞行状态需要而建立。俯仰姿态保持的重要性不仅体现在自身,它更是速度、高度等回路的内回路,对飞行控制性能有直接的影响。俯仰控制回路的控制律设计为:

式中,Kθ,表示纵向传动比系数,θg表示俯仰角给定,θ表示俯仰角反馈,ωz表示俯仰角速率,δe表示升降舵偏角。
高度控制外回路设计需依据俯仰角的变化,即通过比较给定高度和传感器测量的实际高度偏差,根据偏差值控制俯仰角的大小以达到定高控制的目的。为了提
高无人机定高的精度,采用积分分离PI算法,通过增加高度的积分项消除高度静差。但为了限制积分作用过大,需对积分项进行限幅。因此,高度控制回路的控制律设计为:

航向解算:根据待飞航点的坐标信息以及前一航点的坐标信息解算给定航迹角ψg,同时根据反馈的ψ值,得到航向角偏差△ψ;
式(2)中,KH,KHI分别表示高度环放大与积分系数,Hg表示高度给定,H表示高度反馈。
(2)横侧向控制回路
控制副翼和方向舵以消除无人机的实时侧向偏移(由高速GPS数据求得)以及航向偏差,使得无人机按照给定的航线飞行,从而保证无人机在着陆时滚转姿态平稳,航向对准跑道。为便于分析,本文仅考虑着陆段航迹为直线的情况,不考虑无人机的转弯飞行。在图1中,横侧向控制系统中各个环节的含义表示如下:
航线规划:航点解算(航点预先装订好),根据待飞距离L判断是否进入下一个航点;
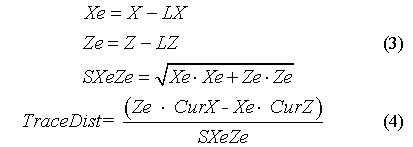
偏航控制:根据待飞航点的坐标信息(X,Z),前一时刻的航点信息(LX,LZ)以及无人机当前所在的位置信息(CurX,CurZ),解算无人机偏离航线的偏航距离。具体计算公式为:
式(3)中,Xe表示待飞航点与前一航点间的距离在X轴上分量,Ze表示待飞航点与前一航点间的距离在Z轴上分量,SXeZe表示两航点间的直线距离。式(4)中,TraceDist表示偏离航线的偏航距离。
待飞距离:根据待飞航点的位置信息以及无人机当前所在的位置信息解算无人机距离待飞航点的待飞距离:
航向解算:根据待飞航点的坐标信息以及前一航点的坐标信息解算给定航迹角ψg,同时根据反馈的ψ值,得到航向角偏差△ψ;
△ψ=ψg-ψ (6)
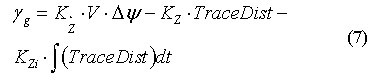
航迹控制回路包括航迹控制外回路和滚转/航向姿态控制内回路。航迹控制外回路实时解算偏航距离以及偏航距离的积分,同时为了提高响应速度,还引入了速度在航迹方向上的分量参数,两者之和作为滚转角的给定。
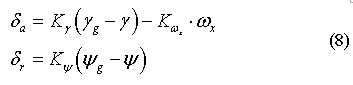
滚转和航向控制回路的控制律为:
3自主着陆轨迹设计
自主着陆过程中飞行高度低,对飞行安全性提出更高的要求,尤其在终端进近时,飞机的所有状态都必须保持较高的精度,直到准确地在某个规定的点上实现接地。为保证无人机安全着陆,在不失速的前提下应该力求较小的着陆速度,同时要求无人机保持抬头姿态,因为下降速率小,飞机接地时撞击小;前飞速度小,着陆后的滑行距离短;保持抬头姿态可以减小无人机的速度,从而提高无人机着陆的安全性。
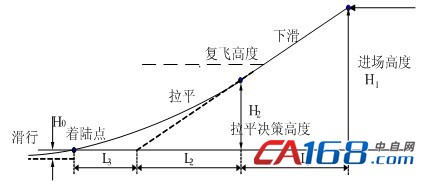
基于以上分析,将无人机的自主着陆轨迹设计分为四个阶段:进近飞行段、直线下滑段、指数拉平段和跑道滑行段,如图2所示。进近飞行段是无人机进场后保持平直飞行准备着陆的阶段;直线下滑段是着陆过程的开始阶段,无人机以一定的轨迹角低头下滑,下降速率比较大;指数拉平段是无人机实现成功着陆的关键阶段,在这个飞行阶段里纵向姿态角由低头变成抬头,高度按指数规律变化,即开始时具有较大的下降速率而到最后下降速率变得很小;最后是跑道滑行段,无人机三轮接地在跑道上滑行,由于阻力作用慢慢停止运动,或者用拦截绳和拦阻网辅助回收。
图2 自主着陆纵向轨迹设计示意图
无人机在自主飞行过程中,当到达预设的着陆进入点时,无人机进入着陆模式。此时,无人机横侧向仍保持自主飞行,通过偏距控制和航向控制保证无人机的横侧向姿态平稳,机头对准跑道。纵向切换成着陆模式,采用基于待飞距离变化的高度给定控制策略,无人机从定高飞行进入直线下滑控制。
直线下滑段的轨迹方程设计为:


式(9)中,L表示无人机到接地点的待飞距离,L1表示直线下滑段进入点到直线下滑段退出点的距离,L2表示直线下滑退出点距离直线下滑轨迹延长线与地面的接触点间的距离,L3表示理想着陆点距离直线下滑轨迹延长线与地面的接触点间的距离,H1表示无人机在直线下滑段进入点处的高度。
在接地前不远处,必须把下滑线的下降速度(约3.5m/s)减小到接地时允许的下降速度(-0.5m/s),并且接地时还要有一定的抬头俯仰角。因此,飞机必须在规定的高度上(约20m)离开下滑线,并以连续的过渡过程飘落,这时必须达到规定的俯仰角,以保证安全接地。为此,必须对无人机进行自主拉平控制。较为理想和成熟的方案当属指数拉平轨迹,即随着高度的降低,下降速度也不断减小。
指数拉平段的轨迹方程设计为:
Hg=(H2+H0)e-t/τ-H0 (10)
式(10)中,H0表示水平地面距离拉平轨迹渐近线的高度, τ为拉平指数,根据飞机的特性选取。为了保证无人机从直线下滑段向指数拉平段的平滑过渡,选取,这样可使无人机的纵向过载均匀增加,不致产生大的过载变化。
在拉平过程中的前向速度近似等于飞行速度V,且认为是常数;因此指数拉平段轨迹方程的另一种形式为:
4仿真结果与分析
基于以上飞行控制律以及着陆轨迹的设计,在MATLAB环境下,对某低速型无人机的着陆段过程进行了数字仿真试验,高度、俯仰角、速度以及侧偏距仿真曲线如图3-6所示。
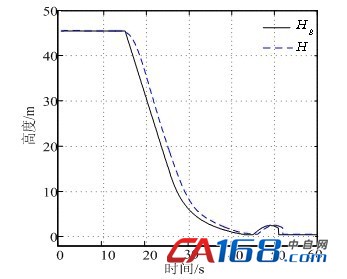
图3 某低速无人机着陆段高度控制曲线
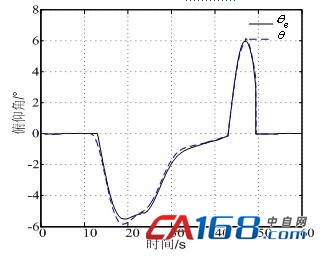
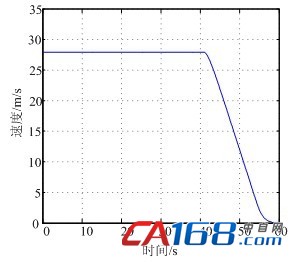
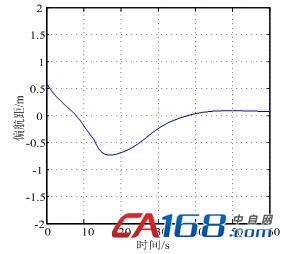
图4 某低速无人机着陆段俯仰角曲线
图5 某低速无人机着陆段速度曲线
图6 某低速无人机着陆段偏行距曲线
由图3中着陆段高度控制曲线可见:从进近飞行段进入直线下滑段时,无人机高度差逐渐增大,这是因为初始阶段无人机的下滑轨迹角还未建立,随着升降舵的操纵,无人机逐渐稳定跟踪预定轨迹。整个下滑过程的高度变化曲线比较平滑,跟踪误差不大于5m,直线下滑段的下降速率不大于3.5m/s,高度下降到20m以后,无人机进入指数拉平段,下降速率逐渐减小并趋近于零;无人机俯仰角从-6°逐渐抬头至0°以上。
在全部下滑飞行过程中,飞行速度为常数,因而,推力也近似为常数。拉平过程中将减小空速,因此在接地时基本达到失速速度,同时逐渐减小推力直至发动机停车,无人机在逐渐增大的阻力和自身重力的共同作用下,下降速率增大到约0.25m/s时主轮接地。接地时无人机的俯仰角为6.2°(图4),接地速度为25.2m/s(图5)。着陆过程中,横侧向侧偏距控制在±0.6m之内(图6),满足横侧向的控制精度要求。当无人机的高度为2m时,距离预定着陆点约为100m,可以实现某低速无人机方案要求的预定点回收。
5结束语
本文研究了固定翼轮式无人机的自主着陆控制的着陆轨迹设计,并设计了无人机着陆控制系统的纵向、横侧向控制律,在MATLAB环境下进行了无人机着陆控制阶段的仿真验证,给出了仿真结果及仿真分析。根据数字仿真试验的结果表明:在无干扰情况下,某低速型无人机的仿真着陆轨迹的设计合理,着陆点控制方法以及控制律参数正确,易于实现,能够满足无人机着陆时的各项指标要求。本文研究的某低速无人机在进入下滑轨迹后的速度比较稳定,所以暂时没有采用控制发动机油门的方法进行速度控制;如果要求在有风扰或力矩干扰情况下也能实现准确的定点着陆,则必须对无人机的地速进行控制。
作者简介
季丽丽(1987-)女 硕士研究生,就读于南京航空航天大学自动化学院,研究方向为飞行控制技术。
参考文献
[1]A. Alonge, F. D Ippolito. Take off and Landing Robust Control System for a Tandem Canard UAV[R].AIAA,2005-3447.
[2]张明廉.飞行控制系统[M].北京:国防工业出版社,1984:13-17.
[3]陈华坤,章卫国,王新民等.舰载机纵向自主着舰控制系统设计[J].弹箭与制导学报,2007,27 (1),73-36.
[4]嵇鼎毅,陆宇平.飞翼布局无人作战无人机自主着陆控制系统设计[J].计算机测量与控制, 2007,15(10),1340-1345.
[5]鲁道夫,布罗克豪斯著;金长江译.飞行控制[M].长沙:国防科技大学出版社,1999,245-420.
[7]张建宏,张平.无人机自主精确着陆控制律设计及仿真研究[J].系统仿真学报,2009,21(3),742-747.
[8]耿明志.无人机自主着陆过程中的视觉导航技术研究[D].南京:南京航空航天大学,2007.
[9]吴德伟,胡奕明.无人机自主着陆半实物仿真系统设计[J].系统仿真学报,2008,20(24),6815~6820.
[10]郭艳艳,陈澜,杨常伟等.无人机着陆抗风鲁棒H 控制器设计研究[J].计算机测量与控制,2010,18(2),348-350.




共0条 [查看全部] 网友评论