



1引言
无线传感器网络,它综合了微电子系统(Micro-Electron Mechanical System,MEMS)、传感器采集技术、数据处理技术、嵌入式技术、数据传输技术以及无线传输技术等[1]。在无线传感器网络中,节点定位机制是指根据有限的位置已知的信标节点来确定无线传感器网络中其他节点的位置,在无线传感器网络的节点之间建立起来位置关联的定位机制。
节点确定自身的定位主要分两步完成:距离测量、位置计算。通过测量与参考节点的距离或角度进行定位的方法属于基于测距(range-based)的定位方法,而不通过测量距离、仅依据相对位置关系或网络连通性来进行定位的方法则称之为无需测距(range-free)的定位方法。
2无线传感器网络的节点定位技术
无线传感器网络的部署区域主要是立体区域即三维区域,在很多具体的应用中,常常把三维问题转化为平面二维问题进行研究和解决[2]。
基本定位算法一般可分为非测距的定位(range-free)和基于距离定位算法两种,这主要根据算法是否需要节点之间的距离以及角度参数来分类的。基于测距定位的算法通过对节点间距离和角度信息的精确测量,借助于三边测量以及三角测量定位方法得出节点的具体位置。而非测距定位则无须测量节点间的实际距离和角度,而是网络连通信息来估算节点间的距离并最终计算出节点的位置。基于测距定位算法外界客观因素对其影响较大,对硬件要求也较高,往往还要需要采取附加机制[3]。
常用的测距定位技术包括AOA、TDOA、TOA以及RSSI技术。尽管RSSI技术的信息获取要容易很多,且符合低功率、低成本的要求,但RSSI有较大的不稳定行,从而会造成比较大的误差;TOA需要节点之间严格的时钟同步,这在很大程度上增大了设备实现的复杂度,因而在松散耦合定位系统中难以发挥作用;TDOA技术由于采取超声波作为测量主要工具手段因而其测量距离受到一定限制,而NLOS问题常会对超声波等信号的传播造成影响;AOA测量技术也会受到外界环境的影响,而且需要有额外硬件配合,因而在硬件尺寸及功耗上可能存在无法用于传感器节点的问题。
考虑到功耗因素以及粗精定位基本能够满足大多数引用的需求,当定位误差要小于传感器节点无线通信半径的40%时,目标的追踪精确度以及路由性能受到定位误差影响不会很大,非测距的定位方式往往更受关注。目前最为典型的基于距离定位算法包括质心算法、MDS-MAP、DV-Hop算法、凸规划算法、Amorhous算法以及APIT算法,其中基于距离定位条件最为精确定位的方式是MDS-MAP算法。
3DV-Hop算法原理
近些年来,国内外提出了很多关于传感器网络节点的定位算法,每一种算法都有各自的特点。对于精度比较高的算法,通信开销和收敛速度等方面的性能可能就会有所下降,采用硬件测距可以提高定位精度,但同时会增加传感器节点的成本。根据具体业务的需要,定位的条件和要求会有所不同,因此,要针对具体的应用设计和采用适合的定位算法。本文采用非测距的DV-Hop定位算法对数据进行定位处理。
美国路特葛斯大学的Dragos Niculescu等人利用距离矢量路由协议和GPS定位的原理提出了一系列分布式定位算法,合称为APS,DV-Hop定位算法就在其中[4]。在传感器网络节点定位技术中,根据节点是否已知自身的位置,把传感器节点分为锚节点和未知节点。
DV-Hop定位算法的基本思想是将未知节点到信标节点之间的距离用网络平均每跳距离和两者之间最短路径的跳数乘积来表示,然后使用三边测量法或其变换形式获得节点的位置信息。DV-Hop算法由以下三个阶段组成:
(1)网络中的节点获取自身与每个信标节点的最小跳数
这一阶段,DV-Hop算法利用典型的距离矢量交换协议的相关原理,每个信标节点都向其邻居节点广播自身位置信息分组,每个节点都维护着一个表{xi,yi,hi},其中xi,yi为信标节点i的位置坐标信息,hi为该节点到信标节点i的跳数,初始化为0。
(2)各信标节点计算平均单跳距离校正值(correction)
每个信标节点根据第一阶段中记录的其他信标节点的位置信息和相距的跳数,利用式(3-1)估算平均单跳距离校正值。
其中,(xi,,yi),(xj,yj)是信标节点i,j的坐标,hj是信标节点i与j(j≠i)之间的跳数。
(3)利用三边测量法或极大似然估计法计算自身位置
未知节点利用第二阶段中记录的3个或更多信标节点的距离,利用三边测量法或是极大似然估计法计算自身坐标。
由上面对DV-Hop算法的介绍可以看出,该算法利用了无线传感器网络的一些基础信息,比如网络的拓扑结构、节点间的位置关系等来实现未知节点的定位,其过程相对简单,图1是DV-Hop定位算法的总体流程图。
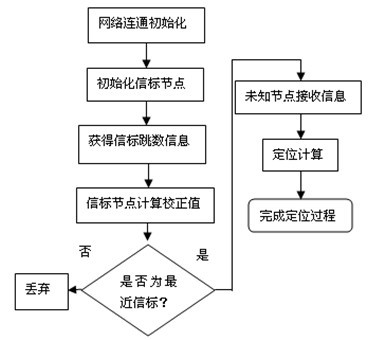
图1 DV-Hop定位算法的总体流程图
4实验结果
对无线传感器网络自身定位系统和算法的性能进行评价时,主要从定位精度、规模、参考节点密度、节点密度、容错性和自适应性、功耗以及成本等几个指标来评价该定位系统和算法的优劣。
实验仿真参数设定,是以边长为100m的正方形为定位区域,网络节点数为30个,信标节点数为10个,节点的通信距离一般设置为50m。采用最小二乘计算未知节点的算法结果为:Error=24.8176,Accuracy=error/R=0.4964;采用极大似然估计计算未知节点的算法结果为:Error=13.8309,Accuracy=error/R=0.2766。测试结果参见图2。
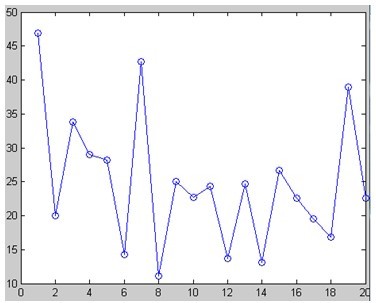
(a)最小二乘法计算未知节点

(b)极大似然估计计算未知节点
图2 每个未知节点的误差
5结束语
非测距的DV-Hop定位算法能够有效的对数据进行定位,同时采用极大似然估计计算未知节点可以提高算法的定位精度。尽管无测距的定位算法在无线传感器网络中的优势十分明显,但是如何更好的提高定位精度,保证定位精度的情况下如何最大化减少计算量和节点间的通信量有待进一步研究。
作者简介
陈娟(1986-)研究生,就读于中北大学电子测试国家重点实验室,研究方向为信号与信息处理。
参考文献
[1]王殊,阎毓杰,胡富平等.无线传感器网络的理论与应用[M].北京:北京航空航天大学出版社,2007.
[2]张少军.无线传感器网络技术及应用[M].北京:中国电力出版社,2010:P97.
[3]杨世杰.无线传感器网络节点定位算法的研究[D].浙江工业大学,2010.
[4]许力.无线传感器网络的安全和优化[M].北京:电子工业出版社,2010:P206.
[5]余建平.基于无线传感器网络的定位技术的研究与实现[D].杭州电子科技大学,2010.






共0条 [查看全部] 网友评论