



1引言
开关磁阻电机调速系统是以现代电力电子与微机控制技术为基础的机电一体化产品,具有结构简单,控制方便等优点。在线转矩观测器对于开关磁阻电机的瞬时转矩控制和转矩脉动的减少是必不可少的。由于磁链的非线性特性影响电机的转矩、相电流和转子位置的大小,电机转矩的精确估算是很困难的[1,2]。传统的开关磁阻电机瞬时转矩估算策略都需要广泛的预测和计算时间,无法满足实时的快速性。因此,只需要有限的测量数据和数学运算的新型瞬时转矩估算策略的研究是很有必要的。
神经网络是目前工程领域应用较多的一种智能控制方法,它把人的手动控制经验转化为控制策略,不需要建立被控对象的精确数学模型,而且动态品质优于常规的控制方法。在此,本文借助BP神经网络建立了开关磁阻电机的非线性转矩估算模型,并通过matlab进行了仿真测试,仿真结果表明瞬时转矩的估计值与实际测量值误差很小。
2BP神经网络及其结构
BP神经网络学习的指导思想是对网络权值与阀值的修正,使误差函数沿梯度方向下降。BP神经网络属于前馈神经网络,它具有前馈神经网络的基本结构[3]。图1所示的为一个单隐层的BP神经网络,它的结构跟多层感知器网络结构完全相同,之所以称之为BP网络是因为它使用了反向传播(Back Propagation)学习算法。U和y是网络的输入、输出向量,每个神经元用一个节点表示,网络由输入层、隐层、输出层节点组成。隐层可以是一层,也可以是多层(图中是单隐层),前层至后层节点通过权连接。
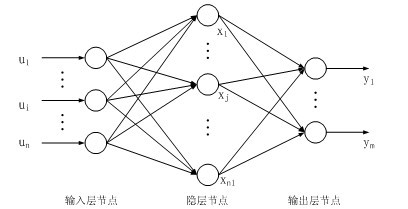
图1 单隐层BP神经网络
以图1所示的单隐层BP网络为例,假设网络输入层有n个神经元,输出层有m个神经元。隐层有n1个神经元,隐层输出为xj(j=1,2,3…n1)。输入层到隐层的权为wij,隐层到输出层的权为wjk。于是,各层神经元输出为:
隐层节点的激活函数一般用可微的 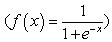 ,
,
而输出节点的激活函数根据应用的不同而异:如果BP网络用于分类,则输出层节点一般用函数或硬极限函数;如果用于函数逼近,则输出层节点应该用线性函数(f(x)=x)[3]。鉴于本文将BP网络用于函数逼近,故隐层节点的激活函数用S函数,输出层节点用线性函数。
3开关磁阻电机转矩特性BP神经网络建模
(1)BP神经网络的训练建模
在BP神经网络的应用中,训练过程是个重要的环节。本文利用Matlab模型库中的一台三相6/4极开关磁阻电机的转矩特性数据作为样本数据对BP神经网络进行训练[4,5]。其电流变化范围为0:4.5:450A,转子位置变化范围为0°:5:90°(0°和90°为不对齐位置,45°为对齐位置),共1900组样本数据。
利用神经网络的非线性逼近特性,建立如图2所示的BP神经网络,该神经网络以电流i和位置θ为输入,瞬时转矩T为输出。
图2 以瞬时转矩为输出的神经网络
综合考虑运算量等因素,我们取隐层神经元个数为10个。初始权值及阀值取-0.2~+0.2内的随机数,学习率通过实验进行调整,目标误差为0.2,采用LM BP算法对神经网络进行训练[3,4],神经网络的训练结果和转矩误差曲面如图3和图4所示。
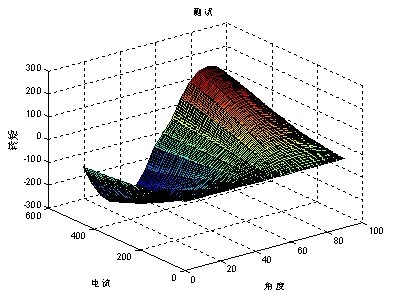
图3 BP神经网络学习结果
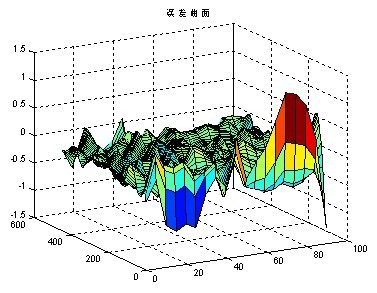
图4 转矩估计误差曲面
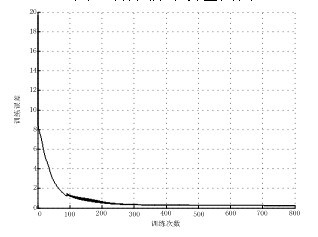
图5 训练曲线
从转矩误差曲面中可以看出,转矩估计误差在转子位置为0°和90°时大一些,转矩误差可达±1.5N.m,而在其它位置却有较小的误差,调为水平视图可知误差在±1N.m内。据此分析可知,训练后的BP神经网络的瞬时转矩估算与实际转矩的误差很小,可以将其运用到转矩的实时在线估算当中去。
3仿真分析
为了验证BP神经网络的训练性能,使用matlab中的SRM电机模型,再加入神经网络构建的开关磁阻电机瞬时转矩估算模块,其仿真模型如图6所示。
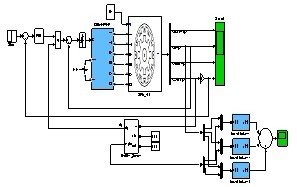
图6 瞬时转矩估算模块仿真图
其中电机的参数设置为:功率:64Kw;转速:1500r/min;负载:15N.m;直流母线电压:240V;二极管导通压降:0.8V;IGBT导通压降:1V。
图7为转子位置、磁链和电流的对比图,通过图可以看出,由公式(12)计算得到的磁共能曲线能够很好的吻合开关磁阻电机的转子位置、磁链、电流曲线。
图8是电机估算转矩和实际转矩的对比图。通过分析可以看出,基于BP神经网络的瞬时转矩的估算与实际的转矩相比,误差在10N.m以内,辨识结果具有较高的精度,为开关磁阻电机的瞬时转矩控制和转矩脉动的减少提供了基础。
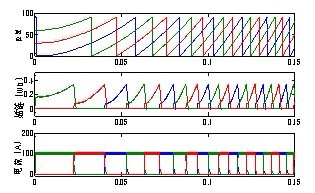
图7 转子位置、磁链、电流对比图
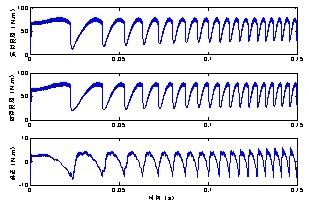
图8 估算转矩与实际转矩的对比图
4结论
本文提出了基于BP神经网络的瞬时转矩估算策略,实现了瞬时转矩的在线测量,与传统的测量方式相比,大大提高了实时性。最终通过实验表明:该策略能够对瞬时转矩进行高精度的检测,为开关磁阻电机转矩控制和转矩脉动的减少打下基础。
作者简介
李大鹏(1988-)男 硕士研究生,研究方向为开关磁阻电机及其控制系统。
参考文献
[1]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1999.
[2]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[3]魏海坤.神经网络结构设计的理论与方法[M].北京:国防工业出版社,2005.
[4]K.F.Wong,K.W.E.Cheng,S.L.Ho and S.Y.Yang. Online Torque Estimator of Switched Reluctance
Motor Running under Hysteresis Current Control. IEEE Transactions on Industrial
Electronics.2006,PD8-8.
[5]S.S. Ramamurthy, J. C. Balda, “Intelligent and adaptive on-line direct electromagnetic torque estimator
for switched reluctance motors based on artificial neural networks,” IEEE International Electric Machines
and Drives Conference, 2001, pp. 826 – 830.






共0条 [查看全部] 网友评论