


1引言
三电平PWM整流器相对于两电平整流器,每个功率器件承受的关断电压仅为直流侧电压的一半,并且在相同的开关频率下,交流侧的电压和电流谐波含量低,直流电压纹波小,具有网侧电流谐波畸变率(THDi)低、器件承压低、开关频率低、输出du/dt小、波电感的体积和直流母线电容的容量小等优点,在高压大功率传动、高压直流输电、并网发电等领域,三电平PWM整流器有着广泛的应用前景。
三电平PWM整流器需要解决中点电压的平衡问题和控制策略问题。
控制三电平PWM整流器中点电压平衡是保证电机安全高效运行的一个重要标志,若其直流侧中点电容电压得不到平衡,结果不仅会使输出电压包含二次或更高次的偶次谐波,从而导致输出电压的畸变,而且使三相输出电流不对称,对交流传动装置会造成极大的损坏。中点电压平衡的控制策略主要有被动控制、主动控制和滞缓控制等。
PWM整流器的控制策略主要有电压定向控制(Voltage Oriented Control,VOC)和直接功率控制( Direct Power Control,DPC)。VOC可分别控制有功电流和无功电流,稳态性能较好,但结构和算法复杂。DPC通过预存的开关表来选择合适的电压矢量,控制有功功率和无功功率,不需要旋转坐标变换,算法简单、动态响应快,但开关频率高、开关损耗大,而且需要高速的控制器和A/D转换器;此外,其开关频率不固定,滤波器的设计困难。基于上述两种方法优缺点的对比,本文设计了一种固定开关频率的三电平PWM整流器直接功率控制方法,采用直流电压和功率外环,电流控制内环,保证了直流电压的稳定,以及有功功率和无功功率的解耦,并用SVPWM代替传统DPC中的滞环和开关表,开关频率固定,同时,也保证了中点电位的平衡。
2三电平PWM整流器的拓扑结构及其数学模型
三电平NPC电压型PWM整流器的拓扑结构如图1所示[2]。
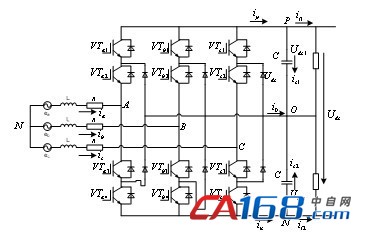
图1 三电平电压型PWM整流器主电路
在该拓扑结构中,设网侧电压ea、eb、ec三相对称,功率器件均工作在理想状态下,交流侧电感为L,等效电阻为R,直流侧电容为C,负载电流分别为iL1、iL2,交流网侧中性点为N,母线电压中性点为O,并设负载为平衡负载。其数学模型的推导过程在很多文献上已详细给出[1][4],此处不再赘述。
对于整流器直流侧,忽略交流侧等效阻抗和功率器件损耗可以得出在d-q坐标系下系统输入输出瞬时有功功率的平衡方程,考虑在系统稳态时,交流侧电感的瞬时有功功率为零,在系统动态过程中,其值也远远小于直流侧功率,故可以忽略。另外,设直流侧负载为平衡负载,中性点零电压平衡,并忽略电容电压波动,则可认为两电容电压相等。
3NPC三电平整流器空间矢量调制方法
由图1可以看出,NPC三电平电压型PWM整流器的每一相桥臂上有4个IGBT、2个箝位二极管和4个反向恢复二极管。现取电容中性点O为参考点,假设上、下电容电压均为udc。当某个桥臂的上面两个IGBT导通时,该桥臂的交流侧电压为udc;当某个桥臂的下两个IGBT 导通时,该桥臂的交流侧电压为-udc;当中间的两个IGBT 导通时,该臂的电压为0。可见,对于三电平NPC电压型PWM整流器来说其交流侧电压可以有udc、0、-udc三种状态,比传统的两电平PWM整流器多出一个状态。因此三电平PWM整流器有27种开关状态, 也即有27个空间矢量。图2为三电平变流器的电压空间矢量图[3]。
为简化计算,现引入矢量长度的概念,以PNN矢量为例,上述假设依然成立,当输出矢量PNN时,三相输出分别为udc、-udc、-udc。则此时输出的电压矢量为[udc,-udc,-udc]。将ABC三相静止坐标系转化为α-β坐标系,可得PNN矢量在α-β坐标系下的坐标为(2 udc,0),取udc为单位长度,将三相电压参考信号除以 udc进行处理后,PNN矢量坐标可以简单记为(2,0)。以此类推,其余26个矢量在α-β坐标系下均可记为(uα,uβ),定义矢量长度为。有了长度的概念后,可以将27个电压矢量进行分类,如表1所示。
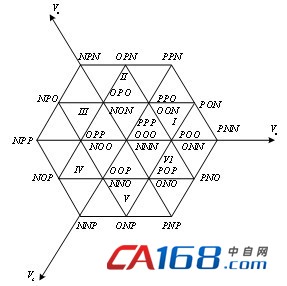
图2 三电平变流器电压空间矢量图
根据图2,整个空间矢量结构可以被分为六个大扇区,按逆时针顺序分别命名为扇区I~VI。因为每个扇区的空间结构具有对称性和相似性,故只需研究其中一个扇区的矢量分配时间,其他扇区可按线性变换映射至该扇区。现以I扇区为例,进行矢量分配时间的计算。
表1 控制矢量长度分类表
|
长度
|
矢量
|
名称
|
|
1
|
POO/ONN PPO/OON OPO/NON OPP/NOO OOP/NNO POP/ONO
|
小矢量
|
|
PON OPN NPO NOP ONP PNO
|
中矢量
|
|
|
2
|
PNN PPN NPN NPP NNP PNP
|
大矢量
|
|
0
|
PPP/OOO/NNN
|
零矢量
|
如图3所示,在第I扇区可以分为4个区域,其中的A区和B区因为被PON矢量穿过又可分为2个小区域,根据表2可以判定矢量所处区域。
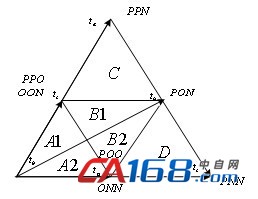
图3 小扇区I的空间矢量
表2 小区域划分极其判断条件
|
区域
|
判断条件
|
小区域
|
判断条件
|
|
A
|
A1
|
||
|
B
|
不符合A、C、D判断条件时
|
A2
|
|
|
C
|
B1
|
||
|
D
|
B2
|
判定矢量所在区域后,可以计算矢量的分配时间,以区域D为例,根据伏秒平衡原理,设开关周期为Ts,可得:
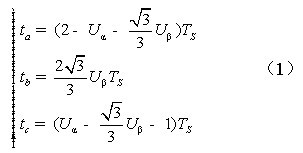
同理可得大扇区I中各小区域中矢量的时间分配。根据(1)式,还应确定矢量的发送顺序,以保证最小的电压跳变和最小的开关损耗。本文采用的是首发小矢量全部为正小矢量,与之等效的负小矢量居中发送的顺序[3]。
4中点电位平衡控制策略
由图1所示,直流侧中点电流io=ic1+ic2,其中由此可得电容中点电流表达式为:

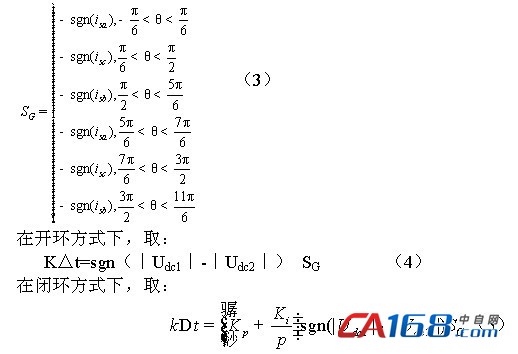
 则负小矢量的作用时间被调整为
则负小矢量的作用时间被调整为 其中K为调整系数,而△t的正负情况则由电压矢量与α轴夹角、中点电流方向和电容电压差值正负决定。故可以构建一个交流电流方向函数SG如下:
其中K为调整系数,而△t的正负情况则由电压矢量与α轴夹角、中点电流方向和电容电压差值正负决定。故可以构建一个交流电流方向函数SG如下:
 幅值为Us1,三电平PWM整流器交流侧电压基波相量
幅值为Us1,三电平PWM整流器交流侧电压基波相量 ,幅值为Uc1, Uc1与Us1间相角差为
,幅值为Uc1, Uc1与Us1间相角差为 换流变压器电抗值为
换流变压器电抗值为 ,L为变流器交流电抗器,ω为电网角频率。
,L为变流器交流电抗器,ω为电网角频率。
若 相位滞后
相位滞后 ,则VSC工作在整流状态,从交流网络吸收有功功率;若
,则VSC工作在整流状态,从交流网络吸收有功功率;若
 分别为电网电压,
分别为电网电压, 为变流器输入电压,
为变流器输入电压,
(c)直流电压响应曲线

(d)直流侧电容电压差值响应曲线

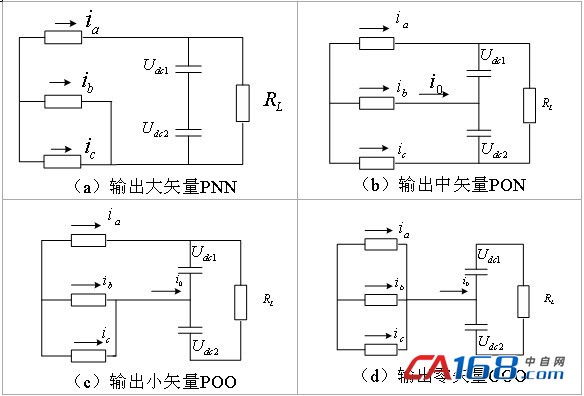
从式(2)可以看出,中点电流i0直接影响直流测两个电容电压的差值,因此,可以通过调整它来保持直流侧电容电压的平衡[5]。图4给出当变流器输出表1所列出的四类矢量时,对中点电位的波动的影响。
如图4(a)和(d)所示,当变流器输出大矢量PNN和零矢量OOO时中线电流i0为零,此时上下两个电容电压相等,不存在波动问题。但变流器输出中矢量PON时如图4(b)所示,此时中线电流i0=ib,若ib大于零,则udc1下降、udc2上升,因此由中矢量引起的电容电压波动不可避免。同理如图4(c)所示,当变流器输出小矢量时POO时,上端电容器的充放电电流为ia,当ia为正且上电容电压小于下电容电压时,适当延长正小矢量POO的作用时间可以使上端电容增加充电时间进而增加其电压值已达到和下端电容电压的平衡。其余矢量作用效果可一次类推。
由此可见当三电平主电路任意相出现零电平时,外电路对直流侧电容中点注入或抽取电流,从而引起中点电位的浮动。引起中点电位不平衡的原因主要是:由PWM 开关组合中的中矢量和小矢量引起中点电位不平衡。可以从空间矢量的方法来分析三电平的开关组合。
三电平的27个矢量中,只有短矢量和中矢量含有零电平,会产生中点电流。其中短矢量总是成对出现且产生中点电流大小相等,方向相反,因此只要平均分配它们的作用时间就能在每个PWM周期内确保短矢量对中点电位没有不平衡影响。另外中矢量对中点电位的影响无法在每个PWM周期内自身抵消,在没有其他不平衡措施时会导致中点电位出现3倍主频率的波动,波动幅度与负载和直流侧电容有关。
图4 变流器输出四类矢量时的中点电流
目前实现三电平中点电位平衡的方法很多,归结起来从PWM组合上实现三电平中点电位平衡的方法主要有:
(1)被动控制法
通过计算得到每个周期短矢量的时间分配,这种方法只适合完全对称的PWM 方法,完全平衡三相负载,在实际应用中难以实现。
(2)主动控制法
根据中点电位的偏移,以及中点电流的大小,通过 PI 调节设置短矢量的时间分配来调整中点平衡。该方法可以很好的抑制中点电位的波动,但同时使控制变得复杂,增加了元件开关次数。
(3)滞环控制法
设置中点电位的滞环区间,当电位超越区间时,再根据中点电流的方向来变换短矢量组合从而调整中点电位,这种方法效果仅次于第二种,而实现却大为简化。本文根据中点电位滞环控制方法的特点,将其应用到SVPWM调制方式中。
不妨设正小矢量的作用时间为其中Kp和Ki为PI调节器的比例常数和时间常数。
5三电平AFE整流器的控制策略
设交流网侧的交流母线电压基波相量若
相位超前,则VSC工作在逆变状态,向交流网络注入有功功率。当两者同相位时,PWM整流器在整流工作时功率因数可达到近似为1,这就要求输入电流为正弦波且与电网电压同相位。采用引入电流反馈的直接电流控制,利用d,q坐标变换将交流侧的电压、电流信号进行转换,使其参考值和反馈值在稳态时均为直流量,通过PI调节器便可实现无稳态误差的电流跟踪控制。
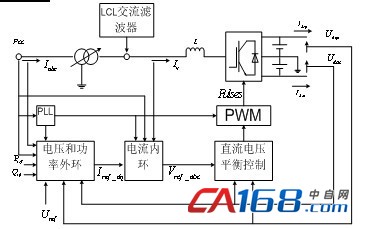
本文采用双闭环矢量控制方式,以控制PWM整流器和并协调后级负载运行。外环功率、电压调节器及有功功率、无功功率均采用PI调节,调节器输出为内环有功电流(d轴),无功电流(q轴)给定值。内环采用前馈解耦控制方式,使d轴和q轴电流能够快速跟踪外环调节器输出。图5为三电平变流器控制系统结构。在同步旋转dq坐标系下(坐标以电网同步速速度旋转)建立其控制模型[4][5]。
图5 三电平变流器控制系统结构
经过CLARKE和PARK坐标变换,将三相定子ABC坐标变换为d轴固定在转子轴线上的d-q坐标。变换后,设为变换后的线电流。以dq轴电流为状态变量可得:
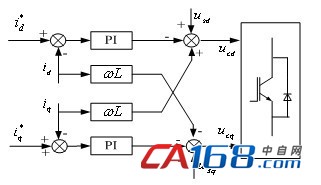
取电网电压矢量 的方向为d轴方向,则q轴电压为零。由模型可知,d、q轴之间存在耦合,故引入前馈解耦控制。变流器内环控制结构如图6所示。图6中
的方向为d轴方向,则q轴电压为零。由模型可知,d、q轴之间存在耦合,故引入前馈解耦控制。变流器内环控制结构如图6所示。图6中 分别为内环d、q轴电流给定信号,来自外环控制器的输出。内环电流采用两个PI调节器快速跟踪给定值。
分别为内环d、q轴电流给定信号,来自外环控制器的输出。内环电流采用两个PI调节器快速跟踪给定值。
取电网电压矢量
图6 内环电流控制框图
6系统仿真
(1) 仿真参数
利用MATLAB根据前述图5搭建系统仿真模型,主要仿真参数如下:系统额定容量160kVA,交流电网线电压有效值1140V,直流电压额定值1800V,换流电抗器0.8mH, 等效电阻 R=0.1Ω,直流侧电容5000,直流侧负载RL=20Ω,开关频率为5kHz。
在Simulink仿真环境下,以系统容量160kVA、线电压有效值1800V对系统进行标幺化,研究了本文所提出三电平 PWM 整流器的控制方法,系统响应过程如图7所示。
(2) 仿真结果及分析
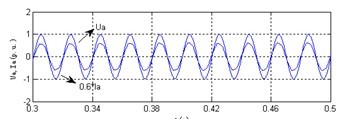
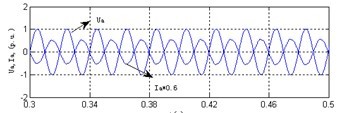
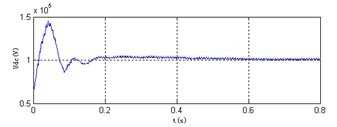
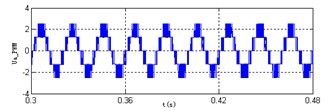
其中,图7(a) 为系统处于整流工况下的U相电压、电流响应曲线。PWM整流器网侧相电压和电流同相位,实现了单位功率因数运行。图7(b)系统处于逆变工况下的U相电压、电流响应曲线,也可见在系统稳态时电压和电流曲线反相位,功率因数也近似为1。图7(c)为直流电压的响应曲线,电压的动态响应快,稳态时波动小,近似恒定。图7(d)为中点电位平衡控制响应曲线,其值为上下两个电容电压的差值,可见运用前述电压平衡方法可以有效的控制直流电容电压的平衡。图7(e)为变流器A相三电平线电压PWM输出波形。图8为样机实验系统及其波形。
(a) 整流时U相电压、电流响应曲线
(b)逆变时U相电压、电流响应曲线
(c)直流电压响应曲线
(d)直流侧电容电压差值响应曲线
(e)三电平PWM线电压输出波形
图7系统响应曲线
7结束语
三电平PWM整流器在中高压、大功率领域将有越来越广泛的应用。本文基于三电平中点箝位式电压型PWM变流器拓扑结构,提出了一种固定开关频率的三电平 PWM整
图8 实验系统照片
流器直接功率控制方法,具有动、静态性能好,谐波畸变率小,有功、无功动态解耦,开关频率固定,单位功率因数运行,并能保持中点电位平衡等优点。并在仿真软件MATLAB中对PWM整流器系统进行了仿真研究,通过检测三相交流电流方向以及直流侧上下两个电容差值正负的方式保持电容电压平衡。系统采用双闭环矢量控制,实现了有功功率,无功功率分别独立控制,同时对输出功率阶跃变换的动态过程进行仿真,结果验证了该控制方法的正确性及可行性,表明整个系统具有较高的动态响应性能。
作者简介
李爽(1982-) 男 研发工程师,硕士,主要研究方向高压大功率多电平变流系统。
参考文献
参考文献
[1] 孟永庆,沈传文,刘正等.基于d_q轴解耦和中点电位控制的高性能三电平NPC整流器控制方法[J].电工技术学报,2007,22(1):108-113.
[2] 韦立祥,孙旭东,刘丛伟等.高性能三电平异步电动机调速控制系统的研究和实现[J].清华大学学报,2001,41(3):13-16.
[3] 高宁,蔡旭,张亮等.基于三电平中点钳位式拓扑的中压风电变流器[J].电机与控制应用,2010,37(12):56-62.
[4] 张崇巍,张兴. PWM整流器及其控制[M]. 北京:机械工业出版社,2003
[5] 杜恩利,何礼高,李旭等.三电平逆变器中点平衡的参数自整定模糊控制[J].电力电子技术,2011,45(1):12-14.




共0条 [查看全部] 网友评论