



1引言
开关磁阻电动机(SRM)以其结构简单、成本低、工作可靠、调速范围广、运行效率高等优点而成为电力传动领域的创新技术。其运行原理遵循“磁阻最小原理”,即磁通总是沿着磁阻最小的路径闭合[1][2]。但由于SRM的磁特性有严重的非线性和电机参数的时变性[3],难以建立精确的数学模型。基于传统的模拟控制系统无法满足高性能和灵活的控制要求[4][5]。
随着智能功率集成电路和单片机的出现,使得SRM模块化和全数字化控制得以实现。尤其是飞思卡尔半导体公司推出的一款专门面向电机控制的MC9S12DG128单片机,建立在一些复杂控制算法基础上的控制原理可以实时地对系统进行在线计算和优化处理[6]。
本文重点讨论了基于MC9S12DG128的开关磁阻电机在目标转速下固定电压斩波PWM占空比、改变角度相结合,对电机绕组电流的影响及制动系统的数字控制器,以及系统硬件资源的配置和系统软件的实现方法,并通过试验验证了方案的可行性。
2SRD系统组成
SRD主要由四部分组成:SRM、功率变换器、控制器和检测环节,系统结构如图1所示。
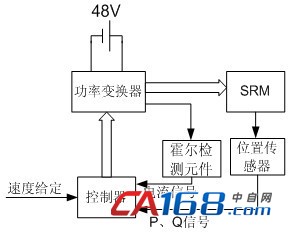
图1 SRD系统结构框图
SRM是SRD实现机电能量转换的执行元件,可以设计成多种不同相数结构,且定、转子的极数有多种不同的搭配,本系统中采用功率为250W的四相8/6结构SRM进行试验。
本系统中采用四相不对称半桥式功率变换器供电,其主电路如图2所示。
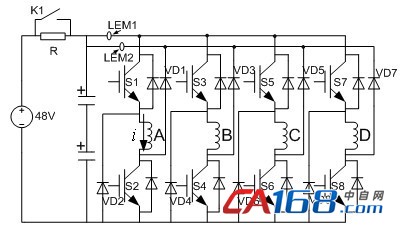
图2 四相不对称半桥式功率变换器
其中使用了8个IGBT作为主开关管S1~S8和8个快速恢复型续流二极管VD1~VD8,48V畜电池作为系统电源。在电压脉宽调制斩波控制方式下,考虑单管斩波的电流波动比双管斩波小,为了减小转矩脉动,该系统采用各相的上开关管S1、S3、S5、S7的驱动信号为PWM斩波信号,下开关管S2、S4、S6、S8的驱动信号为各相的位置开通开通关断信号。
控制器通过对位置信号及电流信号的综合处理来控制功率变换器中开关管的通断情况,从而实现对SRM运行状态的控制
3控制系统设计
3.1硬件结构
本系统中所用的是四相8/6结构的开关磁阻电机,硬件部分包括功率变换器、以单片机为核心的控制单元、位置传感器输入电路、电流检测电路、显示电路、按键电路等。
系统中控制单元的核心采用的是飞思卡尔半导体公司生产的16位MC9S12DG128芯片,具有完善的内部集成模块如专门面向电机控制设计的PWM模块、ADC、SPI、定时器模块、外部中断、Flash和RAM等,此款单片机支持BDM(单线背景调试)模式,可以在线设置硬件断点并可以方便查看任意存储器中的实时数值,适用于要求有较强数据处理能力同时又有较多控制功能的应用中,以此芯片构成的电机控制系统具有硬件电路简单、控制方法实现容易等显著优点。基于MC9S12DG128的SRM控制系统的硬件结构框图如图3所示。
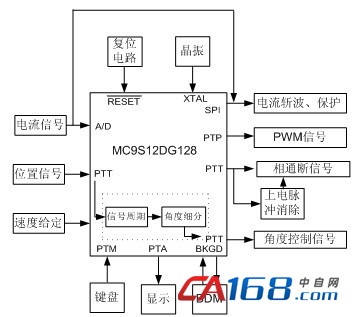
图3 SRM控制系统的硬件结构框图
3.1.1位置反馈和速度计算
正确检测转子的实时位置是SRM实现位置闭环控制的基础,因此,控制器首先需要获得正确的转子位置信号。在本系统中采用光敏式位置传感器检测位置信号,夹角为75°的两个光电脉冲发生器分别固定在定子极的中心线左右两侧处。最后产生两个相位差为15°、占空比为50﹪的方波信号。MC9S12DG128的定时器的输入捕捉、输出比较功能可对方波信号的边沿进行捕获。由位置传感器输出信号经整形和隔离后送入两个捕获单元,中断程序根据捕获事件发生的时间间隔,计算得到电机的实时转速。
3.1.2电流检测
为实现启动时的电流斩波控制和过电流保护,系统采用了霍尔元件采样法,该方法具有测量精度高、线性度好、响应快速的特点,而且可做到电隔离检测。输出信号经过隔离放大输入到MC9S12DG128的ATD模块,实现电流的实时检测和控制。
3.1.3键盘与显示电路
MC9S12DG128的PE1是可屏蔽外部中断输入引脚,可通过程序选择(中断控制寄存器INTCR)该引脚是否和中断逻辑连接,以及下降沿或电平触发方式。本系统中以电平触发方式进入中断。硬件键盘设计的2×4矩阵式,具有启动、停车、设定目标转速等功能,对SRD的控制信息主要通过键盘来输入。键盘采用中断响应方式,以减轻CPU的工作量。SRD的转速、电流、PWM信号的占空比、出错信息等各种运行状态信息都通过显示部分来输出。本系统中的液晶用的是ST7920,该液晶功能强大,控制简单。键盘和显示电路实现了人机交换的重要环节。
3.1.4上电脉冲消除
MC9S12DG128上电瞬间所有的引脚都是处于高电平状态,这种状态是在电机控制中是非常危险的,在系统上电瞬间会使功率变换器四路同时开通,电机堵转,会给电机带来很大的创伤。为了消除这个上电高电平脉冲,本系统中利用了4019的数据选择功能和非门40106的取反作用。让4019的Bn与地边接,别一个端口与电机相逻辑换相端口相连。当上电瞬间利用4019的选择使能端口Ka、Kb使其输出端口Dn选择Bn输出为0,以达到上电瞬间消除脉冲和电机正常运行时也不受到影响。其原理图如图4所示。
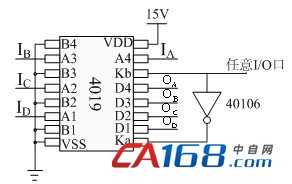
图4 上电脉冲消除原理图
3.1.5 PWM及相绕组换相逻辑的输出
MC9S12DG128内部集成的独立的PWM模块,8个8位通道,设置寄存器可把2个8位PWM通道级联起来组成1个16位通道,提高输出波形的精度,PWM模块一共有4个时钟源,可将总线频率分频得到更小的时钟频率,以满足电机电压须求。每个通道有独立的计数器,可编程的周期和占空比,每个通道可产生独立的连续的波形,占空比可通过软件编程从0%~100%改变,还可选择左对齐输出还是中心对齐输出。变导通角电压PWM控制下,通过PWM技术将直流电源调制成具有一定频率、宽度可调的方波脉冲电压,用以改变电机绕组两端电压大小。本系统设计中,当电机转速达到并稳定在目标设定转速,开环稳定PWM脉冲,改变开通关断角后对电机电流的研究。
电机绕组正确的换相是使电机正常运行的决定因素,本系统中根据位置传感器产生的脉冲信号结合电机的绕组电感曲线,经过微处理器的逻辑判断处理,利用定时器的输出比较功能,在规定的时刻输出需要的功率开关的驱动信号,以实现电机绕组的换相。
3.2软件设计
系统软件设计部分包括主程序、中断服务程序2个部分。主程序主要完成9S12单片机的初始化、电机启动、停车。
初始化程序主要包括:时钟频率设置、脉宽调制(PWM)模块寄存器设置、增强型捕捉定时器(ECT)模块寄存器设置、I/O初始化、软件控制变量赋值。
中断服务程序包括:捕捉中断子程序、键盘中断子程序及液晶显示子程序。捕捉中断子程序包括:转速计算子程序、转速控制子程序、角度控制子程序。
由于电动机的转速不是一个突变量,同时开关磁阻电机调速控制系统对速度的采样是实时的,因此完全可以用前一个采样点的速度参数作为当前采样点角度细分的依据。本文利用9S12定时器的输入捕捉、输出比较功能即可实现电机稳定转速时的角度细分。当位置信号的下降沿和上升沿输入定时器引脚时,单片机进入中断,定时器输入捕捉和输出比较寄存器分别锁存当前自由计数器的值,在此分别用N0和N1表示计数器的值;则电机的一个极距角数值为:
N=N0-N1 (1)
即,电机每一度计数值为:
Na=N/30 (2)
由此可根据电机所需的任何角度,调整定时器输入捕捉和输出比较寄存器的输出比较数值。在中断程序中,调整各开关管的开通、关断驱动信号,实现SRM调速的变角度控制。
控制系统主程序流程图如图5所示。
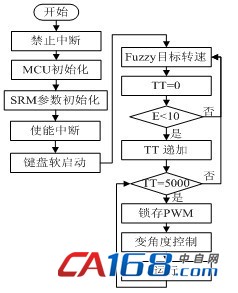
图5 控制系统主程序流程图
当电机软启动起来后,采用模糊控制算法调制PWM信号波的占空比,使系统转速达到目标转速,由于电机的惯性及控制方法的不足系统不可能一直稳定在目标转速下,在目标转速上下浮动5~6r/min,在本文中当时速度偏差E小于10r/min,让参数TT计数加1,当TT计数到时5000时,说明系统在目标转速下已经稳定。此时锁存PWM占空比值,正式进入变角度控制。
4试验结果
如图6为电机在目标转速为550r/min的情况下,采用全角运行(即开通角θon为0°关断角θoff为30°)方式的输出波型。图中示波器4个通道分别表示位置P信号UP、位置Q信号UQ、A相开关驱动信号UA、A相电流信号iA。对于位置P、Q信号是两路仅相位相差15°的方波信号,所以后面的波形只采一路P信号。UP、UQ纵坐标为2V/格(示波器增益为10倍),iA转换成电压后的纵坐标为0.2V/格,经计算电流峰值为1.25A,横坐标为5ms/格。
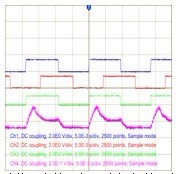
图6 全角度控制下位置信号、驱动信号及电流波形
如图7(a)、(b)、(c)、(d)分别为电机在目标转速550r/min的情况下,采用变角度定PWM的运行方式下的输出波形。图中示波器3个通道分别表示一相位置信号UP、A相开关驱动信号UA、A相电流信号iA。UP、UA纵坐标为2V/格(示波器增益为10倍),iA转换成电压后的纵坐标为0.2V/格,横坐标为10ms/格。(a)图(θon=-1°, θoff=29°)电流峰值为1.46A,(b)图(θon=-1°, θoff=31°)电流峰值为1.46A,(c)图(θon=3°, θoff=27°)电流峰值为1.25A,(d)图(θon=3°, θoff=33°)电流峰值为1.25A。


(a)提前开通1,提前关断1 (b)提前开通1,推迟关断1
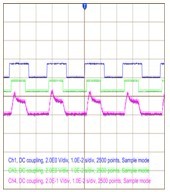

(c)推迟开通3,提前关断3 (d)推迟开通3,推迟关断3
图7 变角度控制下位置信号、驱动信号及电流波形
系统运行中,开关磁阻电机的相电流是开关磁阻电机调速系统的重要参数之一,其波形能反映出系统的运行性能。比较图5与图7(a)(b)(c)(d)可得如下结论:
(1)可见减小开通角θon相电流波形明显此时上升快,峰值高,提高了电机的出力;而减小关断角θoff减少了制动转矩,大大提高了有效转矩。故在开关磁阻的调速系统中,减小θon、θoff到适当的值能得到很好的性能要求。
(2)在固定电压斩波PWM占空比的情况下,增大θoff,图中位置信号UP周期明显变大,即电机转速变小。所以,在开关磁阻调速系统中可以适当的增大θoff的值,以达到电机快速制动的目的。
5结束语
本文实现了以MC9S12DG128为核心的SR电机控制系统硬件和软件设计,充分发挥了单片机的功能强大、运算速度快、丰富的外围集成模块等优点,简化了系统结构和外围电路,并可以通过软件的编写方便地实现电机的多种控制。试验结果表明,角度的软件细分可行且能达到控制要求,角度控制和定PWM电压占空比相结合的控制方案能较好的实现对系统的制动控制,同时实现了SR电机的数字化控制。
作者简介
刘俊纯(1987-)女硕士研究生,专业方向为电力电子与电力传动。
参考文献
[1]陈昊.开关磁阻调速电动机的原理设计应用[M].徐州:中国矿业大学出版社,2000.
[2]Chen Hao, Gu J J. Implementation of Three-Phase Switched Reluctance Machine System for Motors and Generator. IEEE/ASME Trans. on Mechatronics, June 2010. vol.15, no.3, pp.421-432.
[3]Chen H, Ji L. Nonlinear Model and Simulation of Switched Reluctance Servo Motor Direct-Drive System. Dynamics of Continuous, Discrete and Impulsive Systems, Series A: Mathematical Analysis, 2006.2. pp.1961-1968.
[4]顾晨宇,白连平.开关磁阻电机制动控制系统的研究[J].北京机械工业学院学报.第22卷第4期.2007年12月.
[5]李永霞等.开关磁阻电机控制中的角度细分[J].微电机.第43卷第10期.2010年.
[6]王威.HCS12微控制器原理及应用[J].北京航空航天大学出版社,2006.






共0条 [查看全部] 网友评论