



摘 要:本文重点研究了传统PID控制和模糊PI控制的优缺点,并在16bits单片机上进行了数字实现来控制直流有刷电机的转速。实验结果表明,模糊PI控制比传统PID控制的性能要好很多,可以提高系统的动态性能和鲁棒性,是一种有应用前景的智能控制方法。
关键词:直流调速 模糊控制 鲁棒性
1引言
随着自动化程度的提高和普及,受控对象日趋复杂,对于许多难以获得数学模型或模型复杂的过程,应用经典和现代控制理论往往不能取得令人满意的控制效果,甚至完全无能为力。由此人们从不同的角度提出了各种仿照人的知识、思维进行控制的方法,如专家控制、神经元控制、模糊控制和神经模糊控制等等,它们统称为智能控制。与传统的经典、现代控制方法相比,智能控制具有一系列的特点。首先,智能控制突破了传统控制理论中必须基于数学模型的框架,它按实际效果进行控制,不依赖于或不完全依赖于控制对象的数学模型。其次,继承了人脑思维的非线性,智能控制器也往往具有非线性特性,同时它还可以利用计算机控制的便利,根据当前状态切换控制器的结构,用变结构的方法改善系统的性能,此外,某些智能控制方法还具有在线辨识决策或总体自寻优的能力。
2传统PID控制算法
为了能够实现PID控制算法,给出了离散PID的框图,如图1所示。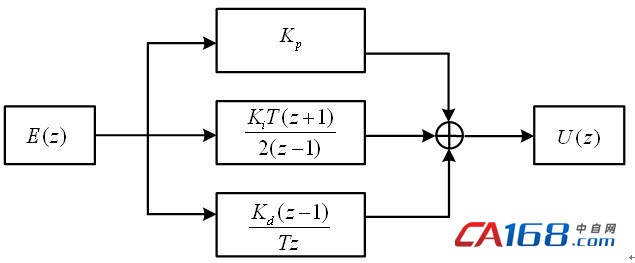
图1数字PID控制框图
给定值设为Gd,G(t)为检测反馈值。E(t)为偏差。
E(t)=Gd-G(t) (1)
PID的控制输出量为:
(2)
其中Kp,Ki,Kd分别为比例,积分,微分系数,t = kT,T为采样周期。
在离散系统中,如果只考虑一个周期,那么将会在结果中引入噪声,因此,采用四阶中心点方法来减少噪声。则上述公式可表示为:
(3)
3模糊控制系统组成与原理及特点
3.1模糊控制系统结构
模糊控制系统是一种自动控制系统,它以模糊数学、模糊语言形式的知识表示和模糊逻辑的规则推理为理论基础;采用计算机控制技术构成的一种具有反馈通道的闭环结构的数字控制系统。它的组成核心是具有智能性的模糊控制器,这也就是它与其他自动控制系统的不同之处。模糊控制系统的框图如图2所示。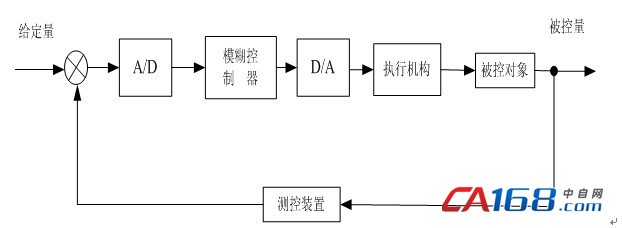
图2 模糊控制系统组成框图
由图2可知,模糊控制系统的结构与一般的计算机数字控制系统基本类似,只是它的控制器为模糊控制器。它也是一个计算机数字控制系统,控制器由计算机实现,需要A/D、D/A,以实现计算机与模拟环节的连接。它也是一个闭环反馈控制系统,被控量要反馈到控制器,与设定值比较,根据误差信号进行控制。模糊控制系统由以下几个部分组成:模糊控制器、输入输出接口、检测装置、执行机构及被控对象。
3.2模糊控制器的组成
模糊控制器(FC—Fuzzy Controller)包含有输入量模糊化接口、规则库、数据库、推理机、输出解模糊接口等部分。输入变量是过程实测变量与系统设定值之差值。输出变量是系统的实时控制修正变量。模糊控制的核心部分是包含语言规则的规则库和模糊推理。如图3所示。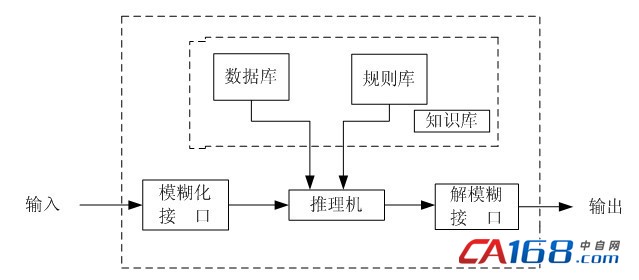
图3 模糊控制器结构图
(1)模糊化接口
在模糊控制系统运行中,控制器的输入值、输出值是确定数值的清晰量,而在进行模糊控制时,模糊推理过程是通过模糊语言变量来进行的,在清晰量和模糊量之间有一定的对应关系。这种把物理量的清晰化转换成语言变量值的过程叫做清晰量的模糊化。模糊化接口就是完成这一功能的。
(2)知识库
知识库包括数据库和规则库,数据库提供必要的定义,包含了语言控制规则论域的离散化、量化以及输入空间的分区、隶属度函数的定义等。规则库根据控制目的和控制策略给出了一套由语言变量描述的并由专家或自学习产生的控制规则的集合,在建立控制规则时,首先要解决诸如状态变量的选择、规则类型的选择和规则数目的确定等事项。
(3)模糊推理
模糊推理是模糊控制的核心,它利用知识库的信息模拟人类的推理决策过程,给出合适的控制量。它的实质是模糊逻辑推理。常用的有最大—最小推理法和最大—乘积推理法。两种推理方法的差别并不是很大。
(4)清晰化接口
清晰化又称去模糊和反模糊。模糊推理的结果是一个模糊集或者是它的隶属函数,不能直接用于作为控制量,因而还必须做一次转换,将模糊量转换为清晰的数字量。清晰化有很多种方法,用不同的方法所得到的结果也有所不同。其中最常用的两种是最大隶属度法和重心法此外还有左取大,右取大,取大平均等方法。在实际应用中可以灵活的选择使用。
3.3模糊控制系统的基本工作原理
模糊控制器通常由计算机实现,计算机经过采样和A/D转换获取被控制量的精确值,然后将此量与给定值比较得到误差信号e。一般选误差信号e作为模糊控制器的一个输入量,由模糊控制器的输入接口将该精确量转化为相应的模糊量,误差e的模糊量可用相应的模糊语言子集e来表示。再由e和模糊控制规则R(模糊关系),根据推理的合成规则进行模糊决策,得到模糊控制量u,由模糊控制器的输出接口作解模糊处理,得到精确数字控制量后,经D/A转换变为精确的模拟量送给执行机构,对被控对象进行进一步控制。
4模糊控制系统设计
4.1模糊控制器的输入输出变量
模糊控制器的输入变量一般包括误差、误差的变化及误差变化的变化量三个变量。模糊控制器输入变量的个数称为模糊控制的维数。以误差和误差的变化作为输入变量的二维模糊控制器,如式(4)和式(5)所示。
error=ωref-ωactual (4)
△error=errorperevious-erroractual (5)
由于能够较严格地反映受控过程中输出变量的动态特性,而控制规则和算法又相对简单,因此这类结构的模糊控制器目前被广泛采用。
4.2隶属函数和模糊规则的设定
在模糊控制系统中,对输入精确量进行模糊化的关键是确定其模糊集的隶属函数。常见的隶属函数有三角形,梯形,钟形及Π形等。隶属函数为三角形隶属函数时,非均匀分布对比均匀分布,系统稳态误差较小,响应更灵敏,曲线上升速度快,在实际控制系统中被广泛采用。本文采用的隶属度函数如图4所示。
图4隶属度函数
如图4采用的隶属度函数,NEGATIVE和POSTIVE是非对称的三角形隶属度函数,这样能够提高系统的精度和减小稳态误差。图5给出了本文采用的规则库,其中带颜色的部分表示所执行的动作。
图5 规则库
4.3模糊控制规则与模糊推理方法
在微控制器上可以用AND和OR操作来表示模糊推理机制,AND操作可以表示前一个状态的信息能够在当前状态中反应出来。如果有2个或2个以上的模糊量共同作用,则可以用OR操作来决定到底哪个量起作用或起主要作用。
5实验结果
上面分析的算法在飞思卡尔的一款单片机上实现,型号为MC9S12,在2个平台上分别用传统PID和模糊PI来控制直流无刷电机的转速。实验结果如下:PID算法的总计算时间大概为240µs,如图6所示,图7为PID采样周期。图8和图9分别为模糊PI的计算时间和采样时间。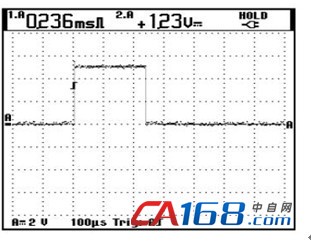
图6传统 PID算法计算周期
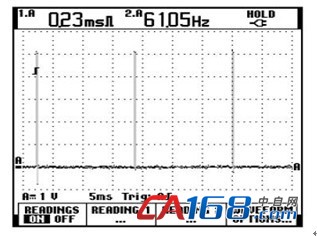
图7 传统PID采样周期
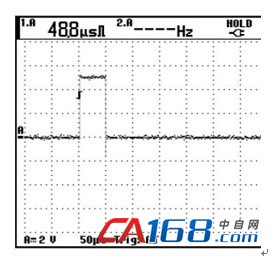
图8 Fuzzy PI计算时间

图9 Fuzzy PI采样周期
由上述实验结果可以得到,Fuzzy PI能够更快的计算得到所需的控制量,更好的满足系统实时性的要求。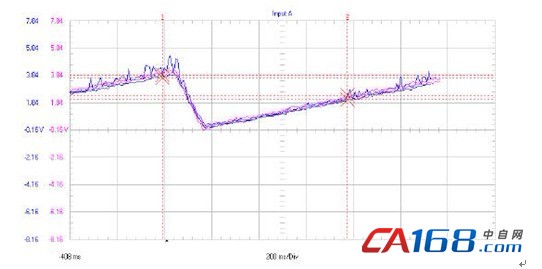
图10传统 PID控制转速输出波形
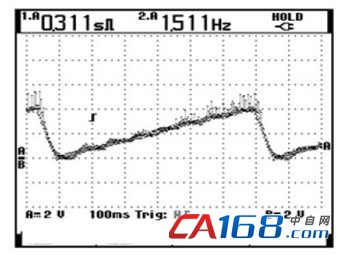
图11 Fuzzy PI控制转速输出波形
图10和图11分别为传统PID控制和Fuzzy PI控制的输出波形,从结果可以看出,Fuzzy PI能够使输出更好的跟随给定,有很好的稳态性能;另外输出的波动也比传统PID控制要小的多,所以采用了Fuzzy PI控制后,系统的性能得到了很大的改善。
6结束语
本文对传统PID控制算法和模糊PI控制算法进行了分析与研究,并以16bits单片机为系统控制硬件,以直流有刷电动机的转速为被控制对象进行了实验研究,其结果表明,模糊PI控制比传统PID控制的性能要好很多,且模糊控制对于系统的负载变化具有更强的适应性和鲁棒性,是一种有应用前景的智能控制方法。
作者简介
李坤(1984-) 男 毕业于安徽理工大学自动化专业,就职于国投新集能源股份有限公司口孜煤矿工作,从事自动化设备相关方面的研究。
参考文献
[1]Muñoz-César,Merchán-Cruz,etc.Speed Control of a DC Brush Motor with Conventional PID and Fuzzy PI controllers. Electronics, Robotics and Automotive Mechanics Conference 2008.
[2]王迎旭,刘国繁.自调整参数的模糊控制器在炉温控制系统中的应用[J].Proceedings of the 4. World Congress on Intelligent Control and Automation,2002,June 10-14.
[3]Yuan-Pao Hsu,Ching-Chih Tsai.Autotuning for Fuzzy-PI Control Using Genetic Algorithm.Trans. on Industry Electronics 1996,31(6):602~607.






共0条 [查看全部] 网友评论