


1引言
随着工业技术的飞速发展,自动控制技术和电力电子技术的重要性得到了广泛的提高。逆变电源是结合了二者技术的产物,它的作用是把从电网上得到的质量较差的恒频恒压交流电能或者直流蓄电池电能、太阳能电池能等变换为电能质量较高的,输出电压和频率稳定的交流电能,提供给交流电机的传动、变频电源、有源滤波器和电网无功补偿器等使用。
本文介绍了单相逆变电源的数学模型。设计了一个基于PI控制的单相逆变电源,通过系统开环和闭环状态下的仿真和实验输出波形对比,对PI控制的控制性能进行了验证。
2逆变器数学模型与分析
逆变电源主电路部分是一个单相全桥SPWM逆变器,其基本电路结构如图1所示。
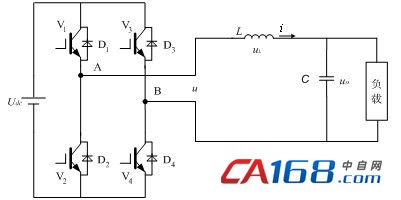
图1 逆变电源主电路结构
由于逆变器两桥臂输出的波形为PWM波,因此桥式电路可等效视为电容两端加了一个输出单极性SPWM脉冲波的电压源Uin。同时,系统的负载类型不定,考虑到环节的负载效应,将负载的扰动电流Io也视为输入源。
通过上述等效,整个电路可等效为图2所示电路。
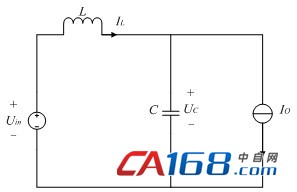
图2 主电路等效结构图
将上述方程转换为复频域的形式,可推导出系统的状态方框图,如图3所示。








在此模型中,对电路进行了理想化的假设:
(1)直流母线电压Udc为恒定不变的;
(2)功率开关管为理想器件;
(3)输出电压基波频率及LC滤波电路自然震荡频率远低于开关频率。
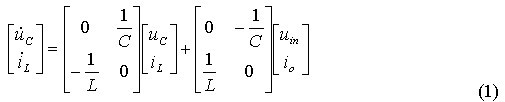
以流经滤波电感的电流IL和滤波电容两端电压UC为状态变量,可得上述模型在连续状态下的状态方程:
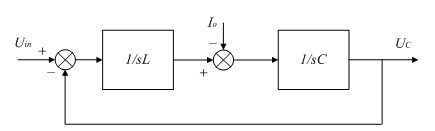
将上述方程转换为复频域的形式,可推导出系统的状态方框图,如图3所示。
图3 系统的状态方框图
其中,根据SPWM波形调制规律,输入Uin为:
式中:Um——调制信号幅值(V)
Uc——三角载波信号峰值(V)
由图3,可得出系统的传递函数:
从传递函数可以看出,这是一个二阶滞后系统。
3主电路设计
设计要达到的具体指标为:功率2kW,输入为400V直流电源,输出波形为220V正弦工频交流电压。对于输出电压波形,还应满足以下要求:逆变器输出频率变化范围应不超过规定值的5%;逆变器输出谐波分量应小于或等于5%。
3.1驱动电路
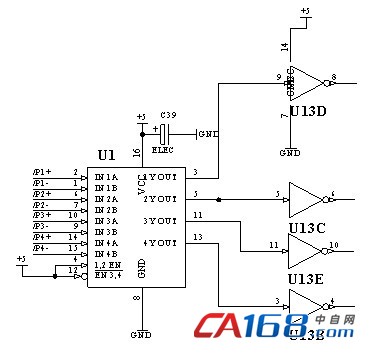
主电路主要以两桥臂的全桥电路为主,同时增设了相应电路来完成对驱动信号的处理。驱动信号处理电路如图4所示,图4中元件U1为DS3486M。驱动电路如图5所示。
图4 驱动信号处理电路
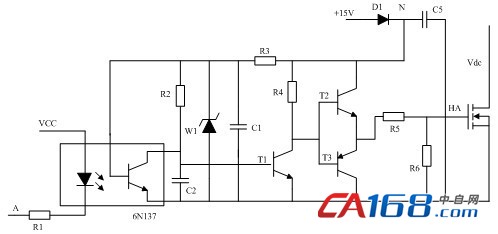
图5 驱动电路
信号分别经四路如图5所示的驱动电路,得到15V驱动信号HA,再分别送入4个开关器件内,即可对主电路实现SPWM调制。
3.2滤波器的设计
设计滤波器时,应主要考虑以下内容:
(1)输入电流和输出电压的THD或单次谐波含量均应降低到允许的范围;
(2)不致过分增加整机的设计容量,即滤波电容不会过多增加功率开关电流;
(3)滤波电感基波压降小,负载变化所引起的输入、输出电压波动小;
(4)滤波器体积、重量小,成本低。
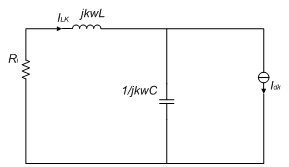
考虑到成本和体积,拟采用LC单级滤波器作为滤波部分。单级LC滤波器k次谐波的等效电路如图6所示。
图6 单级LC滤波器k次谐波等效电路
电源侧第k次谐波电流有效值相量为:
其中,k为谐波次数,ω=2π/TS为脉动电流的基波角频率,亦即逆变器的开关角频率,Idk为逆变器输入电流的n次谐波有效值。ωr为LC输入滤波器的谐振角频率。
电源内阻很小,可忽略不计。则由上式可得:
由此可见,谐波次数越高,对应的电源侧谐波次数的分量就越小,并且,在脉动直流电流基波角频率不变的情况下,可以通过增大滤波电感L、滤波电容C来降低电源侧谐波电流(即减小输入滤波器的谐振角频率ωr,从而减小ωr/ω的值)。
在当前设计中:
ω=2π×20kHz=125663rad/s (6)
为使ωr/ω足够小,可取:
ωr=0.005ω=6.2831rad/s (7)
此时,滤波器的截止频率远小于开关频率(20kHz),并且大于输出电压的基波频率,经计算,其为100Hz。
由此可得:
LC=2.5×10-6 (8)
对于电感、电容各自参数的选取,一般以电感为主进行设计。如果电感选取过大,则影响输出电流的跟踪速度,使得系统动态响应过慢,降低稳态精度;而电感选取过小,则使输出电流的开关纹波加大,必然增大磁滞损耗,同时也使波形变差,增大输出电流波形的THD。电感设计首先满足电流上升率的要求:
由于:
所以有:
由此可确定电感的最大值。再由电流最大纹波的限制,可得到电感量的最小值,通过这两个约束条件可计算出L的范围[1,2]。
通过仿真中进一步调试,最终选取滤波电感L=2.5mH。
再根据LC滤波器已确定的截止频率,可计算出滤波电容C=1000uF。
4控制电路设计
dsPIC是一款结合16位单片机控制特点和DSP高速运算优点的新型芯片,DSP即数字信号处理器,是在数字信号处理的各种理论和算法的基础上发展起来的,用于完成各种实时数字信息的处理,随着高性能DSP控制器的出现,逆变电源的全数字控制成为现实。
为实现PI控制方案,选用型号为dsPIC30F4011的控制芯片来完成对逆变器的控制。控制电路主要分为以下几个部分。
首先,是控制芯片外围电路,如图7所示,图7中14、15引脚输出PWM1H和PWM1L信号(记为AH、AL),10、11引脚输出PWM2H和PWM2L(记为BH、BL)信号。21引脚采样母线电压Um,22引脚采样输出电压有效值Ud,35、36引脚分别接运行和故障指示灯,通过指示灯的状态能够判断出系统软件的运行状态。
图7 dsPIC30F4011芯片外围电路图
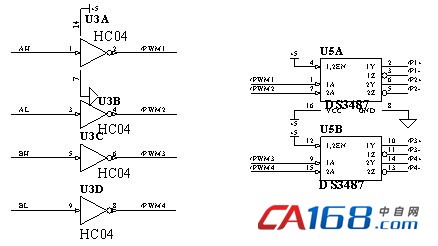
生成的PWM信号需要进行初步的处理,如图8所示,AH、AL、BH、BL信号经反相器整形之后,产生PWM1~PWM4四路信号,再经DS3487差分后生成P1+、P1-至P4+、P4-八路驱动信号送入主电路进行进一步处理。
图8 PWM信号处理电路
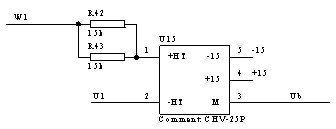
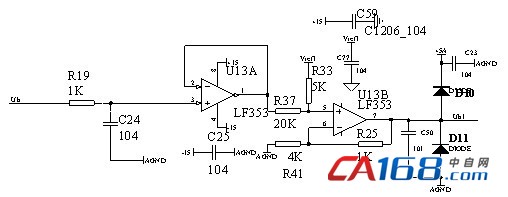
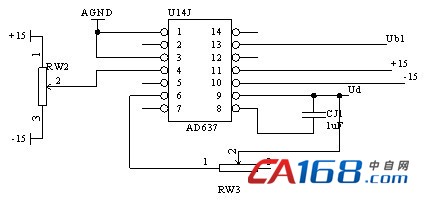
采样电路如图9所示。在图9a)中,输出电压滤波后,通过U1、W1两个端点输入传感器CHV-25P,生成0至3V之间的电压Ub,Ub经图9b)中的运放和偏置电路生成0至5V之间的电压信号Ub1,Ub1送入图9c)中所示的元件AD637中,这是一个有效值采样元件,其输出Ud即为Ub1的有效值。控制过程中的有效值采样就是通过这三部分电路共同完成的。
a) 霍尔传感器电路
b) 运放和偏置电路
c) AD637有效值采样电路
图9 采样电路
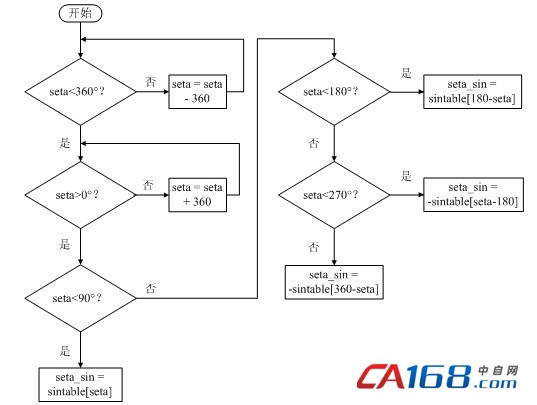
dsPIC30F4011芯片内部集成了脉宽调制模块和10位AD转换器,通过适当的初始化程序,便可完成PWM调制信号的生成、输出电压采样等功能。由于SPWM调制中需要用到正弦波,而产生正弦波形最简便的方法就是使用查找表。在每个PWM周期中,通过调用正弦查表子程序可以计算出A、B两相各自的占空比[3]。本系统使用的正弦表在每个周期内包含360个点,即每一度查表一次,每个输出电压周期内有360个开关周期,由此可计算出当PWM的开关频率为18kHz时,可保证输出电压频率为50Hz。A、B两相查表时应保持180°的相位差,这相当于A、B两相的调制波为互为反相的两个正弦波,据此查表结果设置占空比寄存器PDC值,即可保证调制方式为单极性。
系统查表子程序流程图如图10a)所示,主程序流程图如图10b)所示,PWM中断子程序流程图如图10c)所示。a) 查表子程序流程图

b) 主程序流程图 c)PWM中断子程序流程图
图10程序流程图
5仿真和实验
在matlab软件simulink环境下进行仿真[4],主电路图如图11所示。
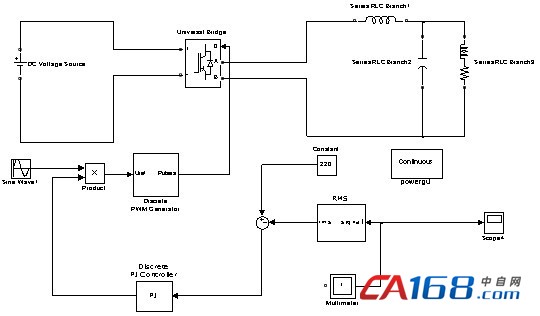
图11 主电路的simulink仿真
PI参数为:Kp=0.002,KI=0.07。
在负载R=100Ω,L=5mH时,输出电压波形的仿真结果如图12所示。输出电压幅值为311.1V,THD=0.16%。
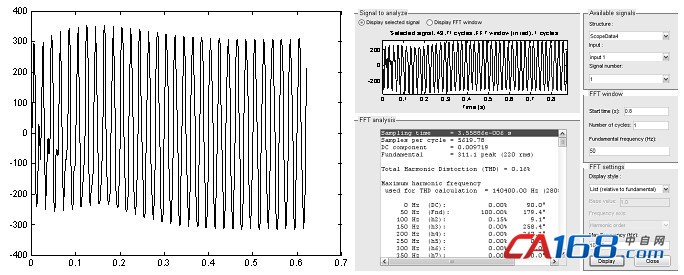
a) 输出电压波形 b) 输出电压傅立叶分析结果
图12 闭环负载R=100Ω,L=5mH时,输出电压波形
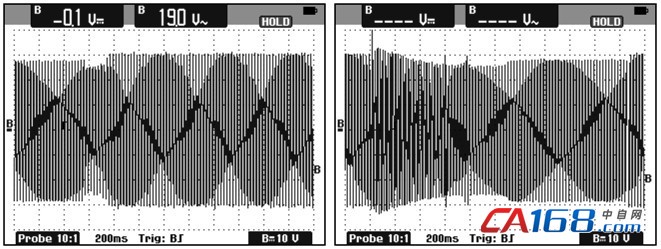
将系统的开环程序写入dsPIC30F4011芯片,连接硬件电路,采用40V直流电压作为输入。首先进行空载实验,输出电压波形如图13所示。其中A路输出为滤波后波形,B路输出为滤波前PWM脉冲波波形。加上40Ω电阻器作为负载,重新测得输出电压波形如图14所示。
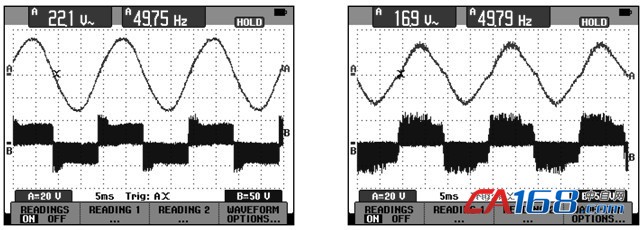
图13 开环空载输出电压 图14 开环40Ω电阻负载输出电压
可以看出开环时,加上负载后,输出电压幅值有较大的下降。闭环系统能够对负载变化后的输出电压进行有效的调整,当Kp=0.2,KI =0.2时,突增和突卸负载的有效值反馈信号波形如图15所示。相应的输出电压波形如图16所示。
可以看出,经闭环调节,可保证有效值反馈信号稳定在一个数值上,从而保证了输出电压幅值的稳定。当突增负载时,输出电压幅值先降后升,但此时输出电压的调整时间约为150ms,大概在8个周期左右。动态性能得到了一定的改善。突卸负载时,输出电压先升后降,产生一定的超调,依然可以保证输出电压幅值卸载前后基本不变。只是所需调整时间较长
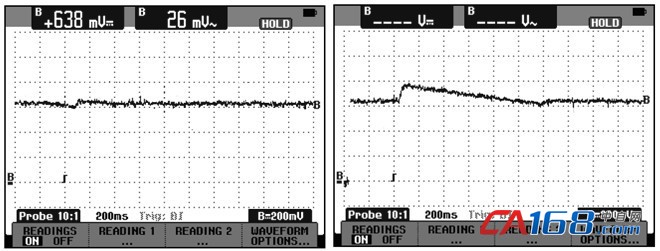
a) 突增40Ω阻性负载 b) 突卸40Ω阻性负载
图15 Kp=0.2,KI=0.2时有效值反馈信号波形
a) 突增40Ω阻性负载 b) 突卸40Ω阻性负载
图16 Kp=0.2,KI =0.2时输出电压波形
由开环系统的实验结果可以看出,在输入直流电压不变的情况下,当负载发生变化时,输出电压的幅值变化较大,而且正弦度也并不理想。增加了电压有效值反馈闭环后,逆变器对输出电压的控制能力明显提高,无论是突增还是突卸负载,输出电压幅值均能在几个周期内迅速调整为负载变化前的数值。
6结束语
本文设计了一个完整的单相逆变电源,并进行了仿真分析和实验检测。给出了该逆变电源的仿真和实验结果,进行了系统开环和闭环状态下的输出波形对比。所设计的逆变电源工作正常。在负载变化时可以保证输出电压的幅值变化很小,这表明有效值反馈的PI控制方式可以有效地对逆变电源输出电压进行调节。
作者简介
陈小龙(1988- ) 男 硕士研究生,主要研究方向为独立式发电系统电能质量调节。
参考文献
[1]王耀北,闫英敏,胡玉贵等.DSP控制的IPM正弦逆变电源系统硬件电路设计[J].现代电子技术,2005(24):104-105.
[2]MOHAN,UNDELAND,ROBBINS.Power Electronics(Converters, Applications and Design)[M].北京:高等教育出版社,2004.
[3]荣雅君,李进兵,董杰等.基于DSP的逆变电源模糊PID控制[C].中国电工技术学会电力电子学会第十届学术年会论文摘要,2006.
[4]吴小华,邹仁伟,叶建峰等.基于数字PI控制的三相逆变电源的仿真研究[J].计算机仿真,2006,23(10):239-243.



共0条 [查看全部] 网友评论