


摘 要:本文以染色机染液温度控制为应用背景,设计了多台染色机染液温度的集散型控制系统。此系统采用ARM9处理器作为下位机主控制器,通过其内置的A/D转换器处理温度信号。使用PT100铂电阻温度传感器采集温度信号。应用RS485总线进行上位机与下位机的实时通信。使用Visual Basic6.0编写的上位机界面能够输入曲线模型和具体的曲线参数,并且可实时显示动态的温度曲线。使用模糊PID控制技术对温度曲线进行控制。使用4-20ma电流控制电动调节阀门开度达到控制染色机染液温度变化的目的。整个系统采用C语言进行编程。
关键字:染色机 ARM9 PID控制 温度测控
1引言
目前国际上的染色技术总的发展趋势一个是环境保护、节能降耗、省时高效,另一个重要趋势是提高染色设备的信息自动化水平。因此染色机设备的控制性能、信息化程度等关键问题将成为染色行业的重中之重。本系统采用ARM9处理器为下位机的主控芯片;应用RS485总线进行信号的传输;采用先进的PID控制技术对染液温度进行控制;上位机界面采用Visual Basic 6.0编程,能够直观显示温度曲线的动态变化,可以在线修改工艺曲线参数;系统的执行器使用电动调节阀来控制进入染色机内部的蒸汽流量。实践证明,此系统应用效果良好。
2整体方案设计
本系统整体框图如图1所示。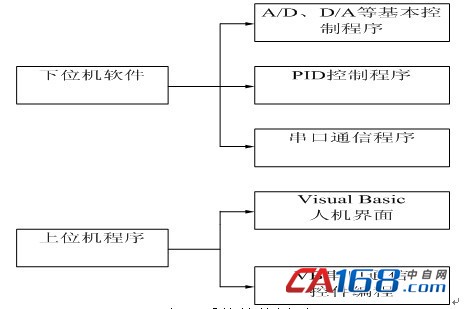
(1)工控机
工控机具有抗干扰性强、稳定性好等优点。工控机可以实时监控分布在染色现场的多台染色机的温度参数值及其参数运行曲线,并且在工控机显示器上可观察到实际运行参数曲线与设定曲线之间的对照关系。
(2)RS485总线
RS485串行通信总线采用平衡差分传输方式,具有抗干扰性强、传输距离较长、传输速率较快等优点。工控机一般具有RS232接口或USB接口,通过RS232/RS485转换器可实现与RS485总线的数据通信。
(3)执行器
由调节部分和执行机构两部分组成。采用4-20mA来驱动阀门改变阀芯和阀座之间的截面积大小控制管道介质的流量等参数。阀内部的控制器把电流信号转换为步进电机的角行程信号,由齿轮等机械结构带动电机转动。同时由三接头的滑动变阻器反馈输出阀门的定位信号。
(4)温度传感器
使用铂金属温度传感器PT100作为温度传感器,PT100测量温度范围为-200-+800摄氏度,具有测量温度范围大、抗震动性好、稳定性好、耐压高、温度与其阻值具有良好的线性关系等优点。
(5)下位机
下位机主控芯片采用ARM9处理器。其内置8路10位的A/D转换器。
3下位机硬件系统设计
下位机硬件系统整体框图如图2所示。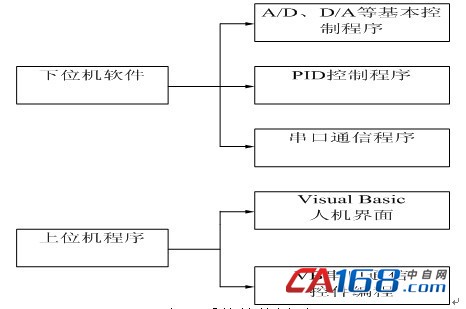
(1)温度采集与测试电路硬件设计
温度传感器选用PT100铂电阻温度传感器,经过电桥电路转变成相应的电压,在送入AD694转换成相应的4-20ma电流以便于长距离传输。其硬件如图3所示。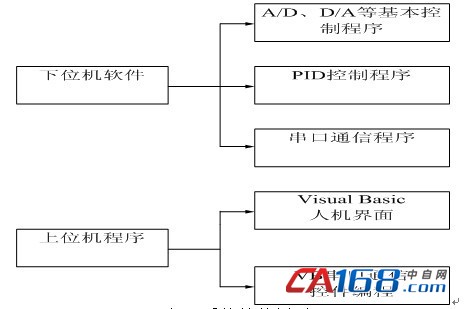
图4是为4-20ma的直流电流经过比例运放电路转变为相应的直流电压,最终送到 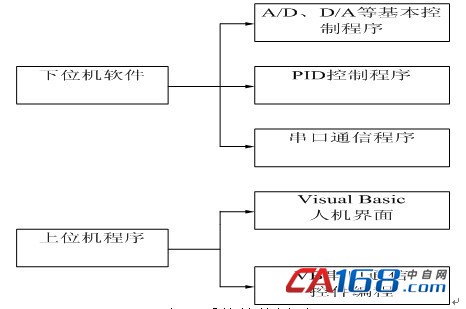 ARM9内置的A/D输入通道。另外系统的执行器电动调节阀的反馈定位信号4-20ma也要通电压的转换输入到A/D输入通道。
ARM9内置的A/D输入通道。另外系统的执行器电动调节阀的反馈定位信号4-20ma也要通电压的转换输入到A/D输入通道。
ARM9内置的A/D输入通道。另外系统的执行器电动调节阀的反馈定位信号4-20ma也要通电压的转换输入到A/D输入通道。(2)执行器硬件系统
下位机外围扩展12位分辨率的D/A转换器芯片DAC1208,为电流输出型芯片,输出电流稳定时间是1us,参考电压-10-+10V,工作电源为+5V--+15V。该芯片主要由8位输入锁存器、12位DAC锁存器、12位D/A转换器组成。
本文采用的D/A转换器芯片输出的是电流信号,再通过集成V/I转换器AD694产生一个与输入电压成正比例的输出电流4-20mA,然后用直流4-20mA来驱动电动调节阀。如图5所示。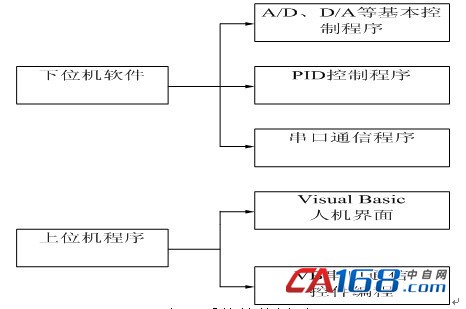
其中的参考电压的硬件实现如图6所示。使用性能良好的基准电压集成电路芯片TL431.温度系数为30ppm/℃。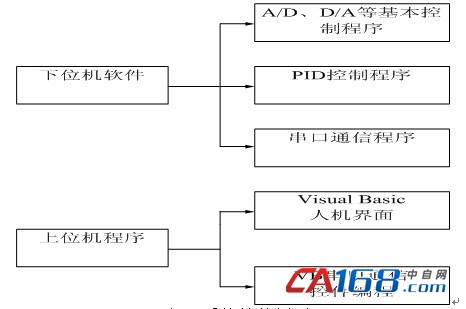
(3)RS485总线硬件设计
RS485串行通信总线采用平衡差分传输方式,具有抗干扰性强、传输距离较长、传输速率较快等优点。工控机一般具有RS232接口或USB接口,通过RS232/RS485转换器可实现与RS485总
的数据通信。MAX485芯片可实现RS485总线与下位机进行串行通信,两条传输线间压差大于+200mV时,输出正电平,小于-200mV时,输出负电平。A与B线之间要跨接120欧的电阻起保护作用。RS485串行通信总线支持1对32的多机通信模式,即一台计算机作为主机,与其他32台从机
进行通信。如图7所示。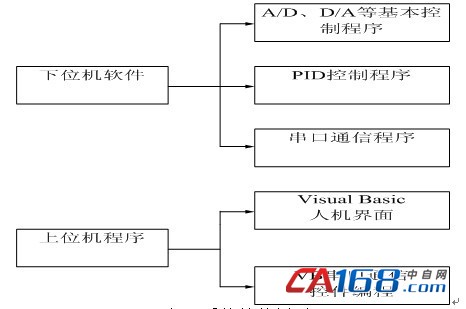
4模糊PID控制
根据偏差的比例、积分、微分三种控制规律,每种控制规律起到作用不同,可以单独使用,也可以组合起来使用。进行控制,简称PID控制,是控制系统中应用最为广泛的一种控制规律。
对于数字系统,PID算法有式(1)和式(2)两种表达式。
P(K)=P(K-1)+Kp[E(K)-E(k-1)]+K1E(K)+Kd[E(K)-2E(K-1)+E(K-2)] (1)
P(K)=P(K)-P(K-1)=Kp[E(k)-E(k-1)]+K1E(k)+Kd[E(K)-2E(K-1)+E(K-2)] (2)
以上两式中,P(K)、E(K)分别是K次采样时的偏差值和PID输出量,Kp、Ki和Kd分别为比例、积分和微分系数。
式(1)求出的是控制量的绝对大小,又称为PID位置控制算法;式(2)有称为PID增量式算法。一般来说,被控量不允许大幅度突变,实际应用式(2)比较多。
温度是典型的滞后量,常规的PID控制会存在超调大、调整时间长、PID参数不易确定等不足。这里引用模糊控制思想对PID参数进行实时的调整,期望能得到更好的控制效果。模糊控制技术包含模糊数学、计算机科学、人工智能、知识工程等多学科相互渗透,且理论性很强的科学技术。模糊控制系统通常由模糊控制器、输入输出接口、执行机构、测量装置和被控对象组成。
模糊控制器上模糊控制系统的核心,一个模糊控制系统的性能优劣,主要取决于模糊控制器的结构,所采用的模糊规则、合成推理算法以及模糊决策的方法等因素。其框图如图8所示。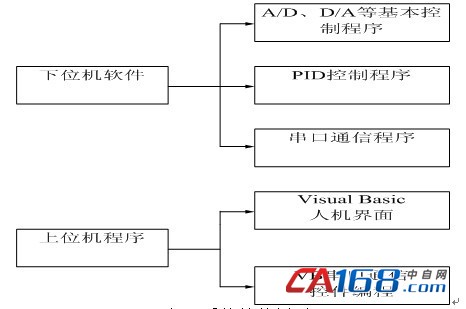
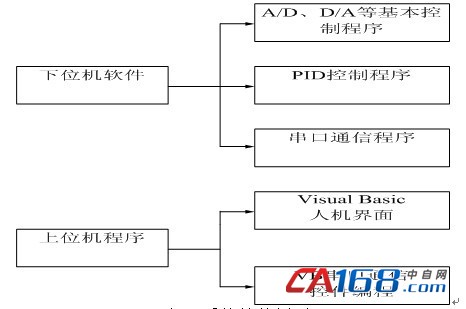 图9为模糊控制系统组成框图。
图9为模糊控制系统组成框图。
图9为模糊控制系统组成框图。具体的调整方式如式(3)所示,其中a、b和c分别为比例系数、积分系数和微分系数的调整系数,Kp’、Ki’和Kd’分别为调整后的用于求取调整PID输出的比例系数、积分系数和微分系数。Kp、Ki和Kd分别为起始点比例系数、积分系数和微分系数。
Kp’=Kp+aE; Ki’=Ki+bE; Kd’=Kd+cE. (3)
由于此处要对PID的三个基本参数均进行实时调整,故对每一个调整系数均建立一个模糊系统。
5应用软件设计
系统软件包括上位机VB界面和下位机处理器控制程序,如图10所示。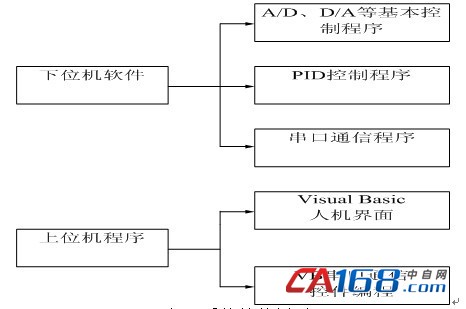
系统的人机界面由Visual Basic6.0 编写.如图12所示,图的左侧用来选择温度曲线的类别,对应的右侧可以设定被选择曲线的具体参数。曲线的类别选择中含有参考曲线这一项,这里包含了几种常用的工艺曲线图。
这里给出一个例子,如图11所示的曲线类型为一次升温曲线,通过调整滚动条来确定具体的温度曲线。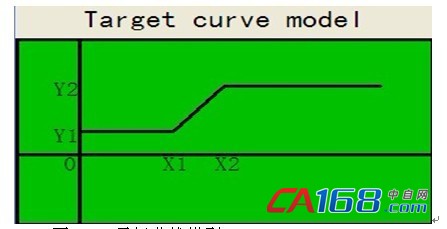
(2)下位机C语言编程
编程包括AD转换程序、串口通信程序、PID控制程序、数据处理程序。
6实验案例
首先连接好各个硬件电路部分。把以ARM9处理器为核心的下位机硬件部分准备好,通过RS485与RS232的转换与上位机PC机连接。同时,下位机部分通过4-20ma的电流发生模块AD694与电动调节阀链接好。这里的实验采用普通的加热热水器代替染色机,以控制水温来模拟代替控制染液的温度。把传感器PT100放入热水器的水中。还有准备好直流24V的稳压电源给PT100提供电源。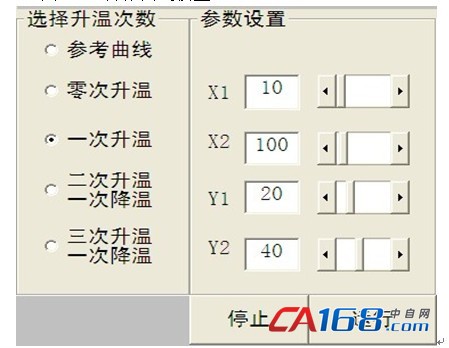
打开上位机编写的Visual Basic 6.0 的人机界面,这里选择普通的一次升温曲线来进行实验。
设置好参数后运行,启动好,实际曲线将以不同的颜色与目标曲线相互对比输出。例如,去温度上升到40摄氏度,以每分钟一摄氏度的速率上升到90摄氏度。然后保持25分钟温度不变,然后自然降温到70度,而后再次保持温度20分钟不变,最好自然降温到40摄氏度。如图13所示。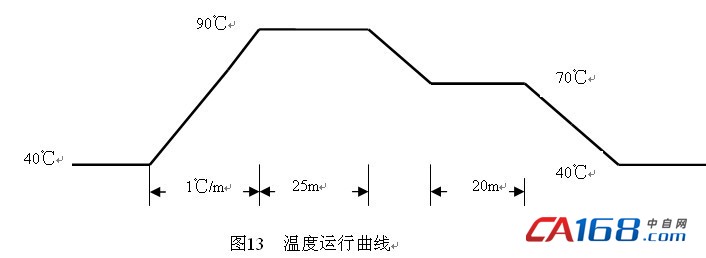
表1 实验测量数据与标准数据的对比
|
温度与时间
|
40/5m
|
50/10m
|
70/40
|
90/50
|
90/70
|
70/90
|
40/110
|
40/120
|
|
对应摄氏度度
|
41
|
52.5
|
69.5
|
91.5
|
89
|
72
|
40
|
41
|
7结束语
该系统硬件系统与软件系统配合良好,能精确的采集到温度值并把相应动态曲线显示在人机界面上。可以自由的输入温度参考曲线。上下位机通过RS485总线通信政策。通过PWM控制AD694芯片的电流输出控制来执行器,达到了自由控制电动调节阀的开度,从而控制染液的温度。通过PID控制,能得到满意的实际运行曲线。最大温度误差不超过2摄氏度。
作者简介
商庆华(1958-)男 教授,主要研究方向为现代测控技术、电力电子技术的应用等。
参考文献
[1]于海生.微型计算机控制技术[M].北京:清华大学出版社,1999.
[2]刘君,邱宗明.计算机测控技术[M].西安:西安电子科技大学出版社,2009.
[3]金建设.嵌入式系统基础教程[M].大连:大连理工大学出版社,2009.
[4]童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2001.
[5]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[6]谭浩强.C程序设计[M].北京:清华大学出版社,1999.
[7]王栋.Visual Basic程序设计[M].北京:清华大学出版社,2002.




共0条 [查看全部] 网友评论