
1引言
锅炉蒸汽过热系统的控制任务就是控制过热器出口汽温在规定范围内,并保护过热器管壁温度不超过允许的工作温度,从而保证过热器的正常使用寿命。过热蒸汽温度过高可能造成过热器、蒸汽管道等的损坏,因而过热气温的上限一般不应超过额定值5℃,过热蒸汽温度过低,又会降低热效率,影响锅炉的经济运行,因而过热气温的下限一般不低于额定值10℃。
由于传统的PID控制或者是单纯的模糊控制都不能很好的对过热蒸汽温度进行有效地控制,因此,经过比较分析本系统采用了模糊自适应PID控制过热蒸汽温度
过热蒸汽温度调节系统结构如图1所示。
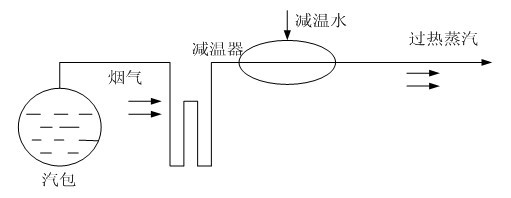
图1 过热蒸汽温度调节系统结图
2基于模糊自适应PID控制的过热蒸汽温度控制系统
2.1系统构成
模糊自适应PID控制器以误差e和误差变化率ec作为输入,可以满足不同时刻误差e和误差变化率ec对PID参数整定的要求。利用模糊控制规则对PID参数进行整定,便构成了自适应模糊PID控制器。模糊自适应控制原理框图如图2所示。
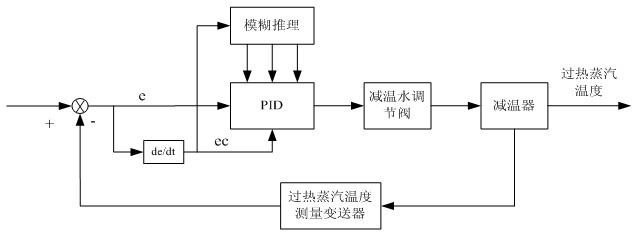
图2 模糊自适应控制原理框图
模糊自适应PID是找出PID的三个参数Kp,Ki,Kd与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的要求,从而使被控对象有良好的动、静态性能。整定必须考虑在不同时刻3个参数的作用及相互之间的互联关系。模糊自适应控制器的设计框图如图3所示。

图3 模糊控制器的设计框图
2.2控制算法
本论文以其中一个参数介绍一下整定方法。
(1)模糊化接口:模糊控制器的输入必须通过模糊化才能用于控制输出,因此,他实际上是糊控制器的输入接口,主要作用是将真实的确定量输入转换为一个控制模糊矢量。误差e、误差改变量△e和输出u的论语为E、C、U,表示如下:
E={-3,-2,-1,0,1,2,3}
C={-3,-2,-1,0,1,2,3}
U={-3,-2,-1,0,1,2,3}
各论域上的模糊子集是:
F(E)={NB,NM,NS, ZO,PS,PM,PB}
F(C)={NB,NM,NS, ZO,PS,PM,PB}
F(U)={NB,NM,NS, ZO,PS,PM,PB}
(2)建立模糊控制规则库:模糊控制器设计的主要任务就是根据专家的技术知识和实际的操作经验,建立合适的模糊控制规则表。最终我们针对Kp,Ki,Kd3个参数分别整定的模糊控制规则表分别如表1,表2,表3所示。
表1 Kp整定的模糊规则表
表1 Kp整定的模糊规则表
|
△Kp ec
e
|
NB
|
NM
|
NS
|
ZO
|
PS
|
PM
|
PB
|
|
NB
|
NB
|
NB
|
NM
|
NM
|
NS
|
ZO
|
ZO
|
|
NM
|
NB
|
NB
|
NM
|
NS
|
NS
|
ZO
|
PS
|
|
NS
|
NM
|
NM
|
NM
|
NS
|
ZO
|
PS
|
PS
|
|
ZO
|
NM
|
NM
|
NS
|
ZO
|
PS
|
PM
|
PM
|
|
PS
|
NS
|
NS
|
ZO
|
PS
|
PS
|
PM
|
PM
|
|
PM
|
NS
|
ZO
|
PS
|
PM
|
PM
|
PB
|
PB
|
|
PB
|
ZO
|
ZO
|
PM
|
PM
|
PM
|
PB
|
PB
|
表2 Ki整定的模糊规则表
|
△Ki ec
e
|
NB
|
NM
|
NS
|
ZO
|
PS
|
PM
|
PB
|
|
NB
|
PB
|
PB
|
PM
|
PM
|
PS
|
ZO
|
ZO
|
|
NM
|
PB
|
PB
|
PB
|
PS
|
PS
|
ZO
|
ZO
|
|
NS
|
PB
|
PM
|
PS
|
PS
|
ZO
|
NS
|
NS
|
|
ZO
|
PM
|
PN
|
PS
|
ZO
|
NS
|
NM
|
NM
|
|
PS
|
PM
|
PS
|
ZO
|
NS
|
NS
|
NM
|
NB
|
|
PM
|
ZO
|
ZO
|
NS
|
NS
|
NM
|
NB
|
NB
|
|
PB
|
ZO
|
ZO
|
NS
|
NM
|
NM
|
NB
|
NB
|
表3 Kd整定的模糊规则表
|
△Kd ec
e
|
NB
|
NM
|
NS
|
ZO
|
PS
|
PM
|
PB
|
|
NB
|
PS
|
NS
|
NB
|
NB
|
NB
|
NM
|
PS
|
|
NM
|
PS
|
NS
|
NB
|
NM
|
NM
|
NS
|
ZO
|
|
NS
|
ZO
|
NS
|
NM
|
NM
|
NS
|
NS
|
ZO
|
|
ZO
|
ZO
|
NS
|
NS
|
NS
|
NS
|
NS
|
ZO
|
|
PS
|
ZO
|
ZO
|
ZO
|
ZO
|
ZO
|
ZO
|
ZO
|
|
PM
|
PB
|
NS
|
PS
|
PS
|
PS
|
PS
|
PB
|
|
PB
|
PB
|
PM
|
PM
|
PM
|
PS
|
PS
|
PB
|
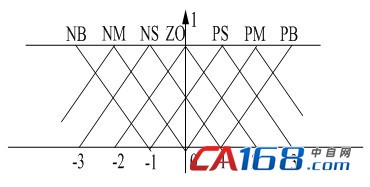
图4 E和C的隶属度
(3)确定各模糊变量的隶属函数值:对模糊变量赋值,就是确定论域上的各个模糊子集所对应的隶属度。这里我们采用的是三角形法确定隶属度与E和C以及U的隶属度赋值表如表4所示。
表4 E和C隶属度赋值表
|
E/EC
|
-3
|
-2
|
-1
|
0
|
1
|
2
|
3
|
|
NB
|
1
|
0.5
|
0
|
0
|
0
|
0
|
0
|
|
NM
|
0.5
|
1
|
0.5
|
0
|
0
|
0
|
0
|
|
NS
|
0
|
0.5
|
1
|
0.5
|
0
|
0
|
0
|
|
ZO
|
0
|
0
|
0.5
|
1
|
0.5
|
0
|
0
|
|
PS
|
0
|
0
|
0
|
0.5
|
1
|
0.5
|
0
|
|
PM
|
0
|
0
|
0
|
0
|
0.5
|
1
|
0.5
|
|
PB
|
0
|
0
|
0
|
0
|
0
|
0.5
|
1
|
表5 U的隶属度赋值表
|
U
|
-3
|
-2
|
-1
|
0
|
1
|
2
|
3
|
|
NB
|
1
|
0.5
|
0
|
0
|
0
|
0
|
0
|
|
NM
|
0.5
|
1
|
0.5
|
0
|
0
|
0
|
0
|
|
NS
|
0
|
0.5
|
1
|
0.5
|
0
|
0
|
0
|
|
ZO
|
0
|
0
|
0.5
|
1
|
0.5
|
0
|
0
|
|
PS
|
0
|
0
|
0
|
0.5
|
1
|
0.5
|
0
|
|
PM
|
0
|
0
|
0
|
0
|
0.5
|
1
|
0.5
|
|
PB
|
0
|
0
|
0
|
0
|
0
|
0.5
|
1
|
依次计算出所有的模糊关系然后求并得到总的模糊关系R。
(5)输出解模糊:应用模糊合成推理得到Kp=U如式(2)所示:
最后通过输出量化得到实际的△Kp用于PID参数Kp的整定。这里我们再用最大隶属度法解模糊。假如计算得到的输出如式(3),这里U选择1,经过尺度变换就可

以输出用于整定Kp如式(2)。这里选择量化因子K1=3,于是输出Kp如式(4)

在这里△Kp=Kp,△Kp即可用于整定Kp如式(5)
Kp=Kp0+△Kp (5)
用同样的方法即可整定Ki,Kd。
第K个采样时刻的整定为式(6)—式(8)
Kp(k)=Kp0+△Kp(k) (6)
Ki(k)=Ki0+△Ki(k) (7)
Kd(k)=Kd0+△Kd(k) (8)
2.3算法流程图
在线运行过程中,控制系统通过对模糊控制规则的结果处理、查表和运算,完成对PID参数的在线自校正。其控制工作流程图如图5所示。
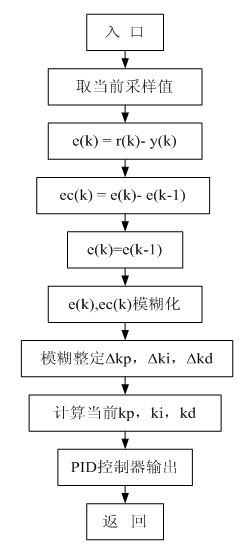
图5 算法流程图
3仿真结果
本文针对工业用锅炉过热蒸汽温度的控制,采用了模糊自适应PID控制算法,为了更好地看出采用模糊自适应PID控制算法相比于传统控制方法的优越性,我们将两者进行了对比仿真。
普通串级控制系统中主调节器参数为Kp=0.5,Ki=0.006,Kd=0;模糊自适应PID控制器量化因子kp=3。仿真结果如图6所示。
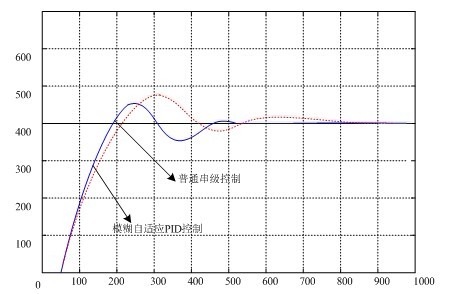
图6 蒸汽温度阶跃响应曲线
图6所示采用模糊自适应PID控制时,被控对象的超调量和响应时间都优于传统的串级控制,因此该方法具有良好的控制品质。
4结束语
基于模糊自适应PID的过热蒸汽温度控制系统能够很好的解决工业用锅炉蒸汽温度大延迟、大惯性的控制难题,控制品质明显优于传统的串级控制,因此在实际中具有一定的可行性。
作者简介
张小亮(1986-)男 硕士研究生,研究方向为计算机控制与仿真。
徐文尚(1956-)男 教授,硕士生导师,研究方向为控制理论与控制工程。
参考文献
[1]和衍庆,俞金寿,蒋慰孙等.工业生产过程控制[M].北京:化学工业出版社,2003.
[2]邵裕森,戴先中.过程控制工程[M].北京:机械工业出版社,2000.
[3]李遵基.热工自动控制系统[M].北京:中国电力出版社,1997.
[4]陈景通.火电厂锅炉主气温模糊控制系统的研究[J].沈阳师范大学学报,2010.




共0条 [查看全部] 网友评论