


基于欧姆龙NJ控制器的半自动芯片封装机
发布日期:2012-11-13 浏览次数:49719
【摘 要】:1 引言 半导体制造技术接近突破摩尔定律的飞速发展,推动半导体产业分工在全球区域重新分配,半导体芯片封装测试流程业务外包已
4.3增量PID控制
数字式PID闭环控制算法分为位置式PID与增量式PID 两类。增量式PID的输出的是控制增量,并无积分作用,因此该方式适用于执行机构带积分部件的对象,如步进电机,伺服电机,加热棒。位置式PID直接对对象输出,适用于执行机构不带积分部件的对象,如电液伺服阀。由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式PID的输出直接对应对象的输出,因此对系统影响较大。
本案通过NJ控制器PID指令(增量式),目标压力和当前压力通过PID计算得出MV,通过(运行速度* MV)作为速度,控制电机JOG,逼近目标压力。当压力越靠近,PID计算得到的MV越低,电机速度越慢,有效的防止超调的产生。
NJ控制器增量式PID控制算法(指令)经过现场调试达到控制要求。
5 注塑压力软极限解决方案
客户设备运行过程中,要求注射伺服设置软极限保护,但因为整台设备有四台压机组成,机械安装的不确定性和最终客户的要求不定,所以客户希望每台压机的注射伺服软极限可以通过触摸屏或上位机修改。从而也保证了每台机器PLC程序没有变动。
5.1 轴参数控制局限
NJ伺服软极限是通过轴参数中启用和设置,步骤如下:
(1)双击需要设定的轴参数设定:
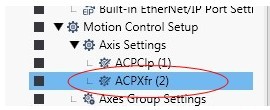
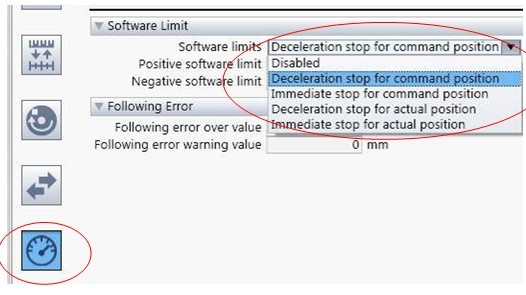
(2)启用软极限功能,默认设置时Disabled:
4.3增量PID控制
数字式PID闭环控制算法分为位置式PID与增量式PID 两类。增量式PID的输出的是控制增量,并无积分作用,因此该方式适用于执行机构带积分部件的对象,如步进电机,伺服电机,加热棒。位置式PID直接对对象输出,适用于执行机构不带积分部件的对象,如电液伺服阀。由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式PID的输出直接对应对象的输出,因此对系统影响较大。
本案通过NJ控制器PID指令(增量式),目标压力和当前压力通过PID计算得出MV,通过(运行速度* MV)作为速度,控制电机JOG,逼近目标压力。当压力越靠近,PID计算得到的MV越低,电机速度越慢,有效的防止超调的产生。
NJ控制器增量式PID控制算法(指令)经过现场调试达到控制要求。
5 注塑压力软极限解决方案
客户设备运行过程中,要求注射伺服设置软极限保护,但因为整台设备有四台压机组成,机械安装的不确定性和最终客户的要求不定,所以客户希望每台压机的注射伺服软极限可以通过触摸屏或上位机修改。从而也保证了每台机器PLC程序没有变动。
5.1 轴参数控制局限
NJ伺服软极限是通过轴参数中启用和设置,步骤如下:
(1)双击需要设定的轴参数设定:
(2)启用软极限功能,默认设置时Disabled:




共0条 [查看全部] 网友评论