


摘 要:通过对ML4425专用集成芯片功能的研究,针对所设计的无刷电动机系统选择外围器件关键参数,利用C8051单片机为核心与ML4425芯片共同搭建系统电路,提出了通过增加简单电路来提高芯片的工作性能的方法,组成闭环调速系统。分析了系统运行的原理并实测 了系统的运行特性,验证了理论分析的正确性,还总结了调试过程中的一些经验和技巧,为进一步研究打下基础。
关键词:无刷直流电动机 无传感器 专用集成芯片 控制器 设计
1前言
本文所设计的控制器应用于干手器排风电机中。排风电机要求控制器简单易实现,而且要满足特定的调速性能。无位置传感器无刷直流电机要求起动时负载转矩越小越好,而排风是风机类负载,这种场合正好可以满足需求。此外,无位置传感器无刷电机与带位置传感器的相比,结构上简单。无位置传感器无刷电机控制主要完成反电势的检测和计算,并合成驱动开关管的信号,实现方法有很多种,从硬件上来说,有用数字芯片计算的,有用模拟电路实现的,也有用专用集成芯片的。用专用芯片实现的特点是控制器 的体积很小。本系统选用的是具有代表性的Mi c r o L i n e a r公司的ML4425 。此芯片要求对所控制的电机的性能和参数有深刻地了解和掌握,除了通过计算选择外围器件,还要根据实验对有的参数进行调整。本文综合考虑了以上因素,阐述了一些关键元件参数的计算并对系统进行综合设计(见图1)。
图1 ML4425 28脚封装管脚图
(1)位置校正( 复位) 时长电容的选择
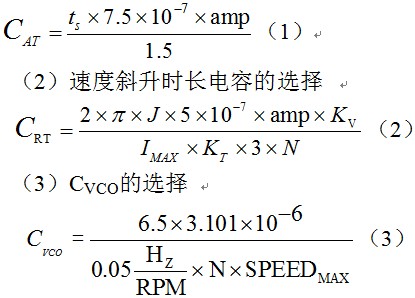
(4)VCO滤波网络元件的选择
滤波网络电路如图2所示。

图2 滤波网络

2ML4425功能简介及外围器件选择
ML4425无刷直流电机控制专用芯片可以起动和控制星形或三角形接法的无刷直流电机,从电机绕组获取反电势信号,利用 PLL锁相环技术准确换向,无需霍尔传感器。其内部实现了电流和转速双闭环,还具有过流和欠压保护以及制动刹车功能,并且可以直接驱动12V至60V的电机。ML4425的窄形2 8脚封装如图1所示。为了能正确地选择 ML4425的关键器件,应该知道电机的额定电压、最大电流、极对数、最大转速、反电势常数、转矩常数转动惯量和阻尼系数等参数。通常这些参数不易知道,但可以通过实验来选择器件,不用精确计算。
3ML4425结构与工作原理
(1)电机起动
ML4425分3个阶段实现电机的起动:①位置校准,②速度斜升, ③给定速度。位置校准(复位) 的时间由17脚的CAT决定。在这段时间内,控制器 L B、HA、HC导通,把转子校正在第一步换相时刻之前30o的电角度上。如果不能可靠起动,应增大CAT的值。一旦对复位电容CAT的充电超过门限值,速度斜升状态就开始了。芯片内部的电源给20脚的滤波器充电,VCO的频率开始增加,以开环方式对机进行换相。斜升的速率由19脚的CRA决定。当斜升状态结束,控制器进入闭环换相,开始采样反电势,正常运行。
(2)电流限制
ML4425利用恒定关断时间的假 P WM方案来限制电机的最大电流。在电机运行期间,比较器把接在1脚上的电流采样电阻上的压降与内部的2.5V的给定进行比较,当1脚上的电压超过0.5V,内部的触发器被触发,这使得低端驱动关断一定的时间。关断时间由26脚的CIOS决定。关断时间不能超过PWM一个周期的时间长。2.5V的给定可以通过改变12脚的电压来改变(见图3)。

(3)速度控制
速度控制在ML4425的内部。速度给定由SPEED SET设定,20脚上的电压正比于电机的速度,内部通过跨导放大器把这一感应速度与给定进行比较。比较的输 出是SPEED COM,SPEED COM再与斜升振荡器比较产生PWM占空比。占空比随给定的变化而变化。起动时系统开环运行,当反电势可以被系统检测到时,进入闭环运行。速度环路的稳定性可以通过SPEED COM的参数来调整(见图4)。

(4)制动刹车
当BRAKE引脚拉低至低电平时,ML4425低端驱动全部导通,高端驱动全部截止,实现电机制动。
4系统构成
本系统由C8051单片机为核心,ML4425为控制芯片,共同组成干手器排风机直流无刷电机控制器,由C8051单片机来控制风机的启动、停止、保护、调速,如图5所示。

图5 系统构成框图
系统程序流程图如图6所示。

图6 系统程序流程图
5ML4425调试问题及技巧
(1)如果只单独调试控制芯片,通常会发现上端驱动正常,而下端无输出。这主要有这样几种可能性。
a)1脚ISENSE没有正确处理,此脚不能悬空,可以接地来调试。
b)CIOS的值选择不合适,使得恒定关断时间比PWM的斩波周期还大。
c)电源电压太低,处于欠压保护状态。
d)2 5脚BRAKE 接的是否正确,正常运行此脚可悬空。
e)其他管脚是否接上所需的外围器件,有的管脚没有接外围器件,下端就没有输出。
(2)当驱动信号都正常,常会出现电机只抖动但不旋转。这时可以调换 5脚SPEED COM 、2 0脚SPEED FB和15脚CVCO所接的器件。如果15脚上升的频率太高,电机可能会跟不上VCO上升的频率而导致起动失败。
(3)如果发现电机只有在初始给定很高的时候才能起动,这时一般可通过增大20脚SPEED FB所接的和电阻串联的电容来解决。
(4)若调速范围很窄,可以通过一个模拟开关,当电机速度达到某一值 ,降低接在15脚CVCO的电容值。20脚SPEED FB可以感应电机速度,滞回比较器接在此脚上可以驱动模拟开关。
6运行特性实验结果
本实验所选电机的参数 :电机的额定电压为300V;额定转速为10000r/min;最大转速 为 17000r/min;额定功率为520W;反电势常数K为0.056;电磁转矩常数为0.53。实验实测的波形如图7至图9所示。

图7 最大速度时电机A相反电势波形

图8 下桥臂的斩波波形

图9 下桥臂斩波时A相反电势波形
7结束语
文中针对无刷电动机系统选择外围器件关键参数,采用了C8051单片机为核心与ML4425芯片共同搭建系统电路,提出了通过增加简单电路来提高芯片的工作性能的方法,组构了闭环调速系统。并通过实验验证了理论分析的正确性,总结了调试过程中的一些经验和技巧,为进一步研究打下了基础。
作者简介
宋宏明(1978-)男硕士研究生,就读于哈尔滨理工大学电气与电子工程学院,研究方向为无刷电动机控制。
参考文献
[1]高国强,林成斌,王凤翔等.基于ML4425芯片的永磁无刷直流电机调速系统[J].沈阳工业大学学报,2000,(6) 1.
[2]皮佑国,吴效明.MC68HC908GP32在无刷无传感器型直流电机控制中的应用[J].1电子技术,2002 (12) 1.
[3]王微子.基于DSP的无位置传感器无刷直流电动机调速系统[J].1微特电机,2004 , (7).
[4]李钟明,刘卫国.稀土永磁电机[M].北京:国防工业出版社,19991.
[5]ML4425 DATASHEET[ EB/OL ].www. fairchildsemi.com.




共0条 [查看全部] 网友评论