



1 引言
随着清洁能源的提出,风力发电引起了各国学者的注意,得到了研究,在我国许多地方都建立了风力发电基地。在风电系统中,电机变桨时起动性能好,输出功率稳定,并且可以高效利用风能,并网时可以有效避免突加和突甩负载现象的发生,所以变桨系统为MW级风电机组的重要组成部分。
文献[1-3]采用传统方法对变桨电机伺服系统进行跟踪控制,文献[4]中采用PID控制,设置了三个环分别对位置跟踪,对速度和电流进行控制,控制相对简单,但是转矩输出不平滑且脉动较大,所以各国学者尝试用新的方法来控制,在智能控制[5-9]快速发展的基础上,模糊控制作为新的控制策略引起人们注意,本文采用模糊控制方法进行变桨系统设计,确定了模糊规则,建立了1兆瓦风力发电机组变桨距模糊控制系统,并进行仿真分析,从仿真结果可以看出本文所采用的控制策略可以抑制转速环输出转矩脉动,达到良好的控制效果。
2 变桨系统模糊控制
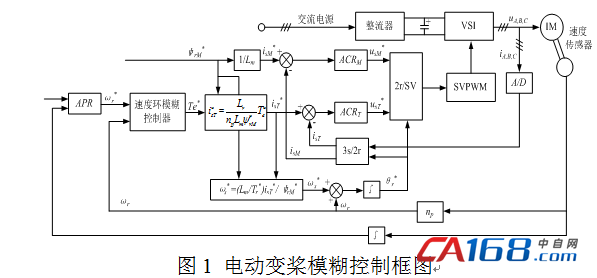
变桨距电机有多个控制变量,各变量之间耦合非常强,是一个非线性系统,所以数学模型非常复杂,传统PID控制器采用位置环、速度环、电流环三环控制,当负载变化时,输出转矩控制有一定误差。从文献[10-11]可以看出,模糊控制器不用建立复杂模型,对非线性、时变控制系统可以进行很好控制。本文对速度环进行模糊控制,所设计的模糊控制结构框图如图1所示。
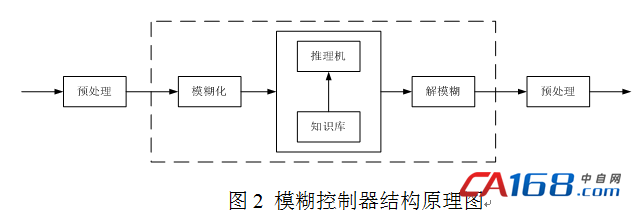
模糊控制首先对输入量的实际检测值进行信号的预处理,然后将其变换映射为适当的模糊语言值,根据模糊控制规则库和和模糊输入,模糊推理求解模糊关系方程,获得模糊输出,将模糊推理所得到的模糊量转化为论域范围内精确的实际控制量,最后进行标度变换,转换为实际的控制作用[12,13]。基本结构如图2所示。
3 模糊控制规则的确定
本文控制目标是调节电动独立变桨伺服系统转速环的输出,且是定值控制。
在模糊控制规则中,首先选定输入/输出语言变量,其次定义各模糊变量的模糊子集,最后建立模糊控制规则。
3.1 选择模糊控制器的语言变量
在本文所设计的模糊控制器中,选定给定值速度r与实际速度y之间的误差e=r-y即速度的偏差,和速度偏差变化率作为输入语言变量,将被控对象的控制量即转矩u作为输出语言变量,分别为E、EC、和输出U。
3.2 定义各模糊变量的模糊子集
对速度的偏差E、速度偏差变化率EC和输出转矩U的模糊集及其论域定义如下:
E、EC和U分别规定为下列模糊子集:
E={NB,NM,NS,ZE,PS,PM,PB}
EC={NB,NM,NS,ZE,PS,PM,PB}
U={NB,NM,NS,ZE,PS,PM,PB}
为了保证模糊集合能更好的覆盖论域,论域为语言变量的两倍,未避免失控将论域划分为11个等级:
E={-5,-4,-3,-2,-1,0,1,2,3,4,5}
EC={-5,-4,-3,-2,-1,0,1,2,3,4,5}
U={-5,-4,-3,-2,-1,0,1,2,3,4,5}
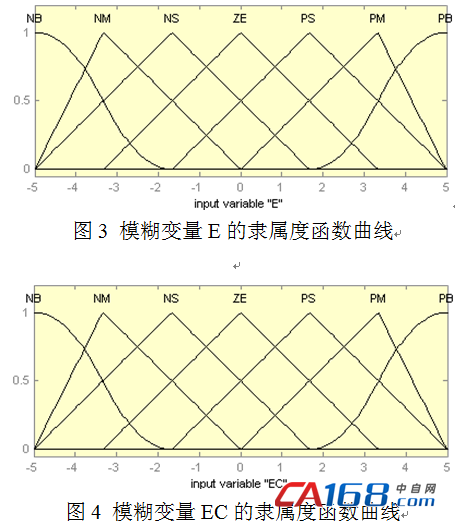
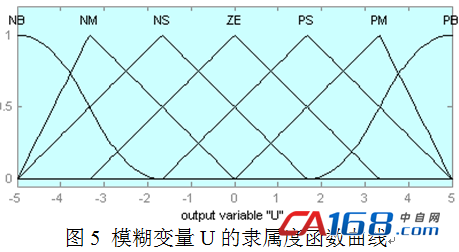
确定模糊子集的隶属度函数,建立语言变量E,EC和U的赋值,如图3~图5所示。
3.3 建立模糊控制规则
建立变桨伺服控制系统中速度调节器的模糊控制规则如附表所示。
附表 模糊控制规则表
|
|
|
|
|
|
EC |
|
|
|
|
|
|
NB |
NM |
NS |
ZE |
PS |
PM |
PB |
|
E |
NB |
ZE |
ZE |
PM |
PB |
PB |
PB |
PB |
|
NM |
ZE |
ZE |
PS |
PM |
PB |
PB |
PB |
|
|
NS |
NS |
NS |
ZE |
PS |
PM |
PM |
PB |
|
|
ZE |
NM |
NM |
NS |
ZE |
PS |
PM |
PM |
|
|
PS |
NM |
NM |
NM |
NS |
ZE |
PS |
PS |
|
|
PM |
NB |
NB |
NB |
NM |
NS |
ZE |
ZE |
|
|
PB |
NB |
NB |
NB |
NB |
NM |
ZE |
ZE |
4 电动变桨距模糊控制系统仿真与分析
根据上述模糊控制理论分析进行整个变桨距模糊控制器的仿真研究,仿真模型如图6所示。
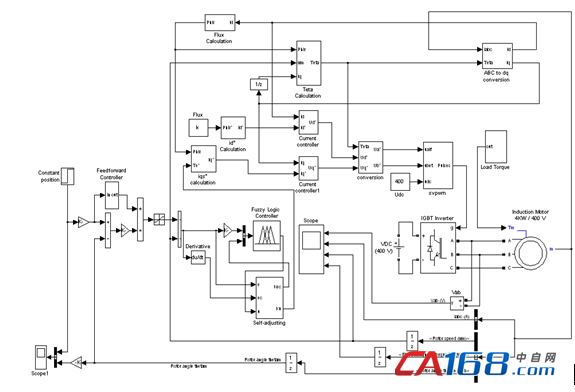
图6 变桨距模糊控制仿真框图
本文依据国内常见主力1兆瓦风力发电机型的具体结构参数进行建模,变桨距执行电机参数为:额定功率4kW,额定电压400V,额定转速1430RPM,定子绕组1.405Ω,定子漏感0.005839H,转子绕组1.395Ω,转子漏感0.005839H,互感0.1722H。正常变桨速度为7.5°/s,减速机减速比109.512,内齿圈啮合比139/15。可以求得单个桨叶最大转动阻力矩为10856.56Nm,设定系统效率为0.95,则变桨执行电机阻力矩应该为11.26Nm。当风速高于额定风速,且转矩有随机波动情况下,仿真结果分别如图7~图9所示。实际风电场中,变桨执行电动机负载转矩在11Nm附近存在非线性变化。
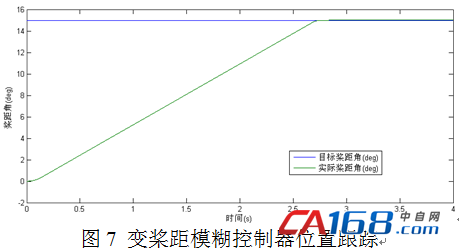
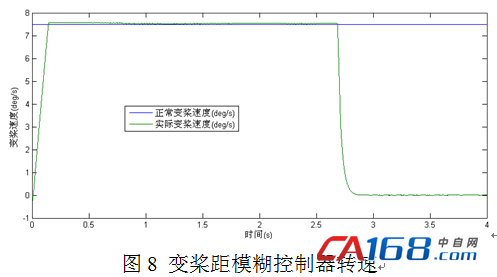
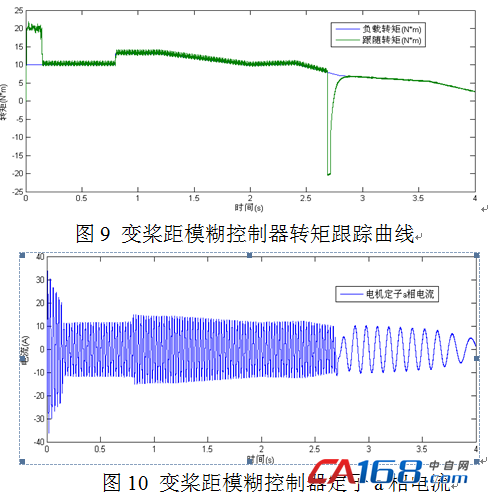
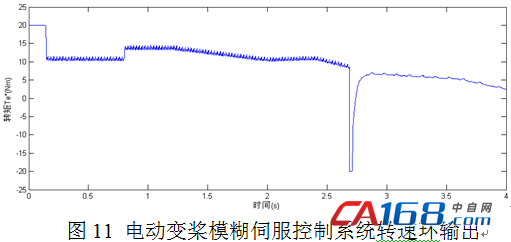
图7~图10为整个电机的转速、电流和转矩的变化过程。由于是在理想状态下运行,参数没有变化,所以变桨电机运行平稳,从图7可以看出变桨位置跟踪准确无超调,从图8可以看出,变桨速度曲线平滑且符合7.5°/s的设计要求,从图9可以看出电机输出转矩脉动小,反应速度快,电机起动迅速,转矩从起动到稳定的时间仅需要300ms-350ms,所以本文所设计的模糊控制变桨系统可以很快减小转速超调,响应快,波动小,曲线平滑,有较强的鲁棒性,动态响应性能较好。电动变桨模糊伺服控制系统转速环输出仿真曲线如图11所示,可以看出,转速环输出转矩控制量明显平滑,而且系统输出转矩脉动小,曲线平滑,所以本文所设计的转速环模糊控制器,能够达到预期的效果。
5 结束语
由于传统电动变桨PID控制方案输出转矩脉动过大,将模糊控制理论应用于电动变桨距系统,设计了模糊控制器。按照风力发电机实际运行工况,模拟负载转矩随机波动的情况,进行仿真实验。通过结果可以验证,当负载转矩随机波动时,本文所设计的电动变桨模糊控制器变桨位置准确,转速稳定而且跟踪转矩脉动平滑,可以及时跟踪转速变化,有效地抑制了输入转矩波动引发的转速震荡和跟随转矩脉动,具有良好的鲁棒性和动态响应性能。由此可见电动变桨的模糊控制具有一定的研究意义。
作者简介
杨晶显 (1984-) 女 硕士研究生 讲师 西北民族大学 研究方向:风力发电技术研究
参考文献
[1] 李程昊,詹鹏,文劲宇等.适用于大规模风电并网的多端柔性直流输电系统控制策略[J].电力系统自动化,2015,39(11):1-6.
[2] 袁海.兆瓦级风力机变桨距控制系统的研究[D].上海:上海交通大学,2007.
[3] 秦立学.兆瓦级风力发电机组变桨距系统研究[D].沈阳:沈阳工业大学,2006.
[4] 刘琳.兆瓦级风力发电机变桨控制系统设计与应用研究[J]. 上海电力,2009,2(3):212-215.
[5] 王江.风力发电变桨控制技术研究[D]. 合肥:合肥工业大学,2009.
[6] 容旭巍,汪至中,荆龙风力机电动变桨伺服系统的控制[J].机械与电子,2008,3:29-31.
[7] 徐峰达,郭庆来,孙宏斌等.基于模型预测控制理论的风电场自动电压控制[J].电力系统自动化,2015,39(7):59-67.
[8] 董海鹰.智能控制理论及应用[M]. 北京:中国铁道出版社,2006.
[9] 张化光等.模糊自适应控制理论及其应用[M].北京:北京航空航天大学出版社,2007.
[10] 高金波,张庆范.基于模糊控制的凸极永磁同步电动机最大转矩/电流比控制策略系统仿真[J].变频器世界,2006,9:70-72.
[11] Th.Lubin , E.Marchand, Fuzzy Controller in A.C. Electrical Machines and Drives[J]. 1995, 11-13Sep: 320-324.
[12] 程善美.矢量控制系统模糊速度调节器的研究[J].电力电子技术,2005, 6:90-92.
[13] 黄青松.风力发电机组电动变桨控制方法研究[D]. 兰州交通大学,2012.
基金项目:国家自然科学基金项目(51465053);中央高校基本业务费专项资金项目(31920160073)






共0条 [查看全部] 网友评论