
轨道交通已成为我国各城市公共交通体系的最佳选择,得到了很大发展。城市轨道车辆是轨道交通中运送乘客的重要工具,随着科学技术的发展,我国城市轨道车辆亦取得迅猛发展,预计至2050年我国的城市轨道交通线路总长将超过4500公里。轨道交通完成的运量可达到城市公共交通运量的50%~80%。城市轨道交通的大力发展,大大改善了广大城市居民的出行条件,极大的满足了上班族对公共交通时效性的要求,缓解公共交通的运行压力。而在城市轨道车辆的牵引、制动状态检测方面还处于起步阶段。牵引电机是驱动机车轮轴的主电动机,是城市轨道车辆的重要组成部分。它的运行性能直接关系到机车的牵引性能,直接决定机车是否正常运行,因此对于牵引电机的研究就显得至关重要。
2 变频牵引电机测试系统硬件设计
牵引系统硬件构成如图1所示。系统主要由供电部分和牵引与加载控制部分组成。
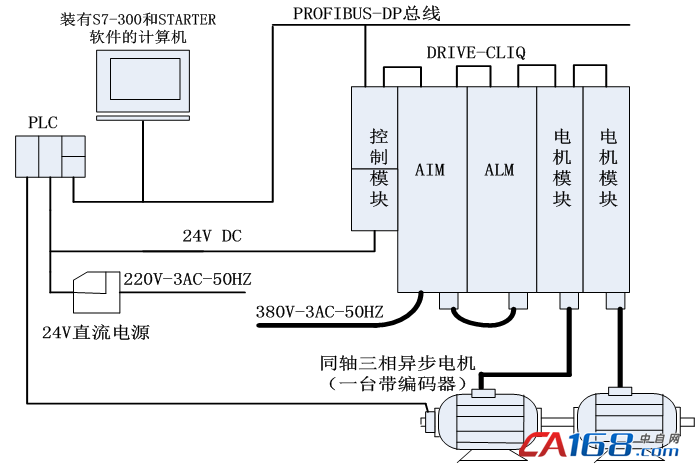
图1 牵引模拟系统硬件配置
2.1 供电系统
该测试系统的供电部分分为直流电源和交流电源两部分。其中,直流电源部分将220V交流电转换为24V直流电作为S7-300和S120各个模块的驱动电源;交流电源采用380V工频交流电,系统实验过程中,380V交流电经过S120变频单元的调压、滤波、整流(AIM模块和ALM模块)后模拟城市轨道车辆直流母线供电,直流母线上直流电经逆变单元(电机模块)逆变成频率和幅值均可调的交流电用于驱动三相交流异步牵引电机。
2.2 控制部分
该测试系统的控制部分采用西门子S7-300 PLC作为控制器,该型号PLC上集成了Profibus-DP总线接口、MPI通信接口及数量为16/16的开关量I/O,能够完成高速计数、定位、脉冲输出、频率测量、PID闭环控制等功能。本系统中PLC配置如下:电源模块、CPU模块(采用CPU313C-2DP)、机架、存储卡总线电缆。S7-300系列PLC的控制核心CPU313C-2DP能够实现高速计数、逻辑控制、PID控制、频率计算等功能。PC作为编程装置,运行S7-300PLC编程软件Step7,对PLC进行硬件配置和软件编程。
2.3 牵引与加载系统
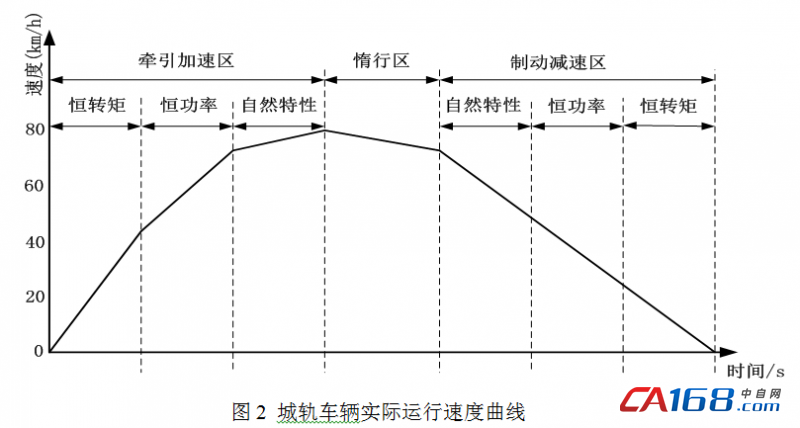
该测试系统中的牵引电机采用德国西门子公司生产的2.2kW三相交流异步电机。负载电机采用西门子公司生产的3kW三相交流异步电机。通过牵引电机和负载电机的共同作用,依次实现电机的恒力矩、恒功率、恒转速和自然特性、牵引模拟系统中,两台电机构成了闭环主电路系统。牵引工况时牵引电机和负载电机分别处于电动机和发电机状态,发电机发出的电能经逆变单元回馈到直流母线,实现能量的再利用,只需控制少量电能和由于机械摩擦等而消耗掉的能量。城市轨道车辆实际运行过程的速度曲线如图2所示。
牵引电机和负载电机均采用西门子公司的Sinamics S120变频器进行驱动,每台电机均有各自的电机模块进行控制。S120变频器为模块型变频器,该系统由一个中央控制模块CU320、一个主动型接口模块AIM、一个主动型电源模块ALM和两个电机模块组成。电源模块将三相交流电整流成600V的直流电,两个电机模块都连接到直流母线上。电源模块ALM将经过接口模块AIM滤波后的电网三相交流电变为可调节电压的直流电,两个电机模块将直流电逆变为交流电分别驱动牵引电机和负载电机。S120的各个模块均集成了DRIVE-CLIQ数据传输接口,通过此接口线缆控制单元完成与各个模块之间及模块与模块间的通信,从而实现数据的传输和中央处理器对模块的控制。
3 变频牵引电机测试系统软件设计
本测试牵引系统的软件主要实现的功能为控制牵引电机与负载电机的运行过程、各硬件之间通信的实现、从变频器中提取电机运行参数、将各实验项目中的参数进行存储、计算和显示。该牵引模拟系统的软件主要包含以下几个部分:
(1)牵引电机启动/制动部分:牵引电机采用V/f控制方式,实验开始时候给定变频器输出最高频率,根据定义的电机运行曲线图,在启动和减速过程中测量电机的各项参数和变频器直流母线电压变化。
(2)负载电机阻力加载部分:变频器S120另一组电机模块驱动负载电机,用来模拟轨道车辆在运行过程中受到的阻力,阻力加载按照预先设定的阻力函数随着列车运行的环境线路等变化而变化。
(3)参数显示实时部分:在参数存储和波形显示部分,从指定的目录中读取测试过程中存储的测量数据,并将数据通过图表方式显示出来,通过视窗监控软件设计的控制面板显示在测试过程中相关参数的波形,分析在实验过程中电机参数变化产生的原因。
3.1 软件设计流程
(1)模拟牵引系统运行前,在控制面板上预先设置所要进行的实验预定值。电机控制模式在变频器的组态过程中已经确定,转矩控制或转速控制。
(2)定义牵引电机运行速度曲线、给定负载电机阻力值计算函数,设定实验进行过程中数据采集的采样周期。
(3)启动模拟牵引系统控制牵引电机的运行,运行过程中的特性参数可以曲线和数字两种形式实时地显示视窗控制中心的控制面板,完成测试后系统停车,将测得数据存储在所设定的文件夹中。
(4)提取实验数据,绘制模拟牵引试验系统电机运行的参数曲线。
软件流程图如图3所示。
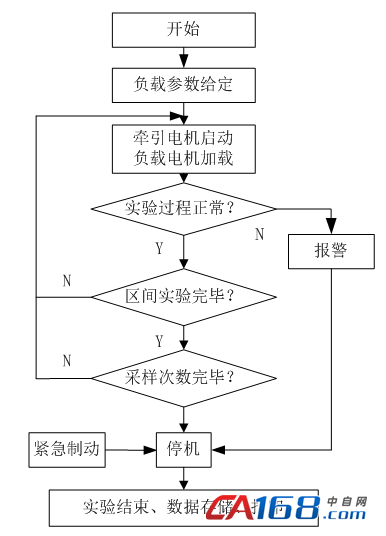
图3 实验程序流程图
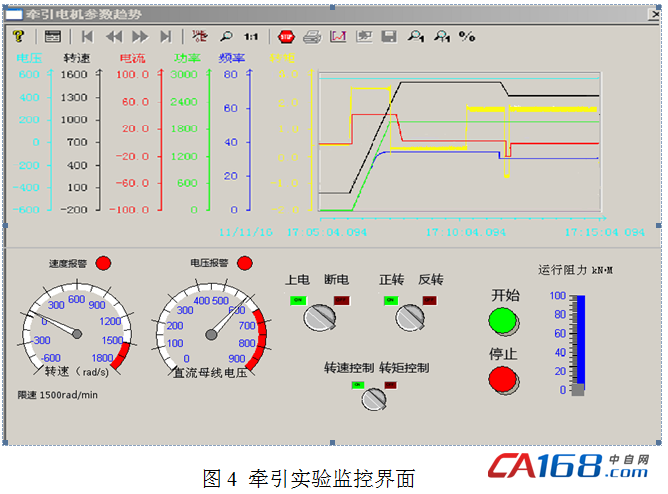
测试系统的牵引实验控制面板如图4所示。
4 实验方法介绍
(1)牵引电机运行状态:测试系统中的牵引系统实验重点是考察牵引过程中牵引电机的各项参数的变。牵引电机启动后,恒转矩牵引至740rpm,进入稳定运行过程。经过一定时间后进行逐级减速。首先减速至400rad/min转速平台,延续60s,然后减速至200rad/min转速运行持续5s,然后再次减速至100rad/min转速运行持续5s,最后停止。
(2)负载电机转矩给定:城市轨道列车在运行过程中负载阻力随着速度和线路工况的变化而变化,而在本实验过程中假设城市轨道列车在同一区间的负载阻力变化较小,在变频器组态的过程中有控制逻辑和开闭环控制中进行设置。
(3)控制方式设置:在组态变频器时候分别对牵引电机和负载电机的控制方式分别设置。牵引电机的控制方式设定为矢量控制方式;负载电机的控制方式设定为DTC(直接转矩控制)的转矩控制方式,共同实现对城轨车辆实际运行状态的模拟。
4.1 牵引工况空载起动实验
启动测试系统中的监控软件的平台,进入牵引试验系统操作界面。设定最高频率为25Hz,负载电机对牵引电机不加载。此时,由于转差的存在牵引电机所能达到的最大转速将低于同步转速750rad/min。电机上电,实验开始电机运行在空载状态,随着实验的进行系统对牵引电机的各项参数进行收集并保存。当电机转速接近同步转速后不再升高,电机处于稳定状态。当系统运行在稳定状态后系统停止运行。系统在运行过程中会对牵引电机的各项参数自动进行测量处理,并将最后所得数据保存起来,以备后期提取。牵引电机空载启动过程数据如表1所示。
表1 牵引电机输出数据
|
序号 |
转速 |
转矩 |
频率 |
定子电压 |
定子电流 |
|
1 |
4.18 |
0.08 |
1.04 |
16.17 |
1.64 |
|
2 |
30.91 |
0.97 |
6.59 |
54.63 |
5.46 |
|
3 |
73.23 |
2.77 |
8.34 |
70.50 |
5.32 |
|
4 |
258.94 |
3.37 |
9.97 |
82.58 |
5.06 |
|
5 |
376.97 |
3.61 |
13.23 |
107.85 |
3.39 |
|
6 |
481.50 |
4.08 |
16.66 |
135.93 |
3.21 |
|
7 |
550.70 |
4.20 |
18.94 |
151.61 |
3.42 |
|
8 |
739.70 |
4.47 |
24.92 |
202.64 |
3.41 |
从表1中可以看出,随着电机转速的不断增加电机的转矩也不断升高当电机转速稳定后电机转矩也维持在一个很小的范围内波动,此时的牵引转矩为牵引系统的空载转矩,它产生的原因主要是由于电机风扇阻力、摩擦力和系统运行过程中的谐波引起的。在整个实验的进行过程中,由于牵引电机采用的启动方式为V/F控制,故定子电流一直维持在一个比较小的值。
4.2 牵引工况负载起动实验
启动监控软件的平台,进入牵引试验系统操作界面。最高频率的设置与空载试验相同为25Hz,通过负载电机对牵引电机恒定加载,以模拟城市轨道车辆在运行过程中受到的阻力。同样的,由于转差的存在牵引电机所能达到的最大转速将低于同步转速750rad/min。模拟牵引系统电机上电,负载电机实现对牵引电机进行阻力加载。实验开始后,电机运行在带负载运行状态,随着实验的进行系统对牵引电机的各项参数进行收集并保存。当电机转速接近同步转速后不再升高,电机处于稳定状态。当系统运行在稳定状态后系统减小电机转速,观察电机参数的变化,后实验系统停止运行。系统在运行过程中会对牵引电机的各项参数自动进行测量处理,并将最后所得数据保存起来。对电机的运行参数提取后绘制的参数变化曲线如图5所示。
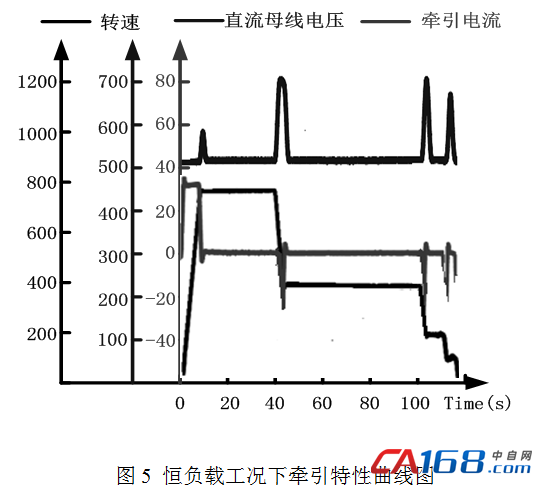
由牵引特性曲线图5可以看出,作为电动机的牵引电机启动后,当它的转矩稍高于负载电机提供的转矩,模拟牵引系统电机转速开始迅速升高,此时直流母线电压会有非常小的下降变化,但是很快就会维持恒定;在启动的瞬间牵引电流迅速增大,并在加速的过程中会一直维持在高位,当电机速度达到稳定状态后,牵引电流迅速回落到一个较小的值,约为3A左右,牵引转矩的变化与牵引电流的变化过程相似。
5 结论
本文结合当前我国城市轨道列车随车检测技术的发展,研究一种基于城轨车辆的牵引电机测试系统。分析了测试系统中的牵引实验台设备的操作方法和其软硬件组成部分。分别进行了牵引工况下的空载和负载试验,对不同负载工况下的牵引电机运行特性进行了分析和比较。实验结果表明本测试系统具有较好的实用价值。
参考文献
[1] 谢宏成,乌正达,谢维康. 城市轨道车辆牵引仿真计算[J].电力机车与城轨车辆A streetcar
named light rail[J]. Spectrum,IEEE,1991.2,28(2):20-22
[2] 李华德.交流调速控制系统[M].北京:电子工业出版社,2003.3:92-226.
[3] 汤蕴璆,史乃.电机学[M].北京:机械工业出版社,2005.1:163-221.
[4] 邵志专,杨俭,宋瑞刚,等.城市轨道车辆负载阻力的模拟系统[J].上海工程技术大学学
报,2011.12:321-323.
[5] 杨俭,宋瑞刚,方宇等.30kW交流电机城市轨道车辆模拟牵引系统[J].电力机车城轨车
辆,2008,31(6):1-4.
[6] 金建飞.列车牵引计算系统的研究[D].成都:西南交通大学,2010.
[7] 周刚.关于曲线附加阻力计算的体会[J].黑龙江科技信息,2007(1):8.
[8] 天津电气传动设计研究所.电气传动自动化技术手册[M].北京:机械工业出版社,1998:3-12.
[9] 李思杰,陆峰,杨中平等.牵引电机负载模拟系统的转矩控制方法[J].电气传动,2010,40(12):52-60.
[10] 陈瑞阳,席巍,宋柏青.西门子自动化项目设计实践[M].北京:机械工业出版社,2009,5:45-6.




共0条 [查看全部] 网友评论