


摘 要:针对传统搅拌机工作负荷不稳定,噪音大等问题,提出用模糊PID控制方法来实现搅拌机驱动电动机的功率恒定,设计了两输入、三输出的模糊控制器,运用MATLAB/Simulink对系统建模以及仿真,结果表明,该控制系统超调量小、响应速度快、振荡小、稳态精度高,满足搅拌机工作负荷稳定的控制要求。
关键词:搅拌机 模糊PID控制 Simulink
Abstract: For the traditional mixer work load instability and noisy, It is proposed to use fuzzy PID control method to realize the constant power of the mixer driving motor, a fuzzy controller of two inputs and three outputs is designed, through MATLAB/Simulink software to built the model and simulate, the results show that the control system has small overshoot, fast response, small oscillation and high stability accuracy, and meet the control requirement of the stability of mixer work load .
Keywords: Mixer Fuzzy PID control Simulink
【中图分类号】TP273【文献标识码】A 文章编号1606-5123(2017)06-0000-00
1 引言
搅拌机系统广泛应用于建筑行业、化工行业等生产用料需求大的行业[1],传统的搅拌机控制系统不稳定,振动、噪音都非常大,造成物料的混合比例精度差,搅拌出来的混合物质量不稳定,系统工作性能差。
搅拌机的工作性能与很多因素有关,如温度、搅拌材料等非线性因素,常规的PID控制方法,难以保证在这些非线性因素下始终保持最佳的工作性能。模糊控制是建立在人工经验基础之上的,在设计中不需要建立被控对象的精确数学模型,对于动态特性不易掌握的对象非常适用,但存在消除稳态误差的性能比较差,控制精度不太高的缺点。模糊PID控制方法综合了常规PID控制方法和模糊控制方法的优缺点,将PID控制方法和模糊控制方法结合起来,提高了搅拌机控制系统的动态精度。
模糊PID控制将模糊控制与PID控制结合起来,利用模糊逻辑并按照一定的模糊规则对PID控制的比例,积分,微分系数进行实时优化以达到较理想的控制效果。[2]
对于搅拌机自动控制系统来说,其主要的控制目标是实现搅拌机工作负荷稳定,即控制驱动电动机的功率恒定。搅拌机模糊PID控制系统原理如图1所示。
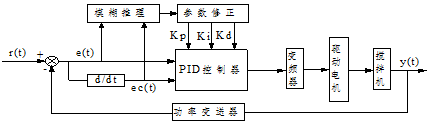
图1 搅拌机模糊PID控制原理
系统通过功率变送器检测搅拌机驱动电动机的功率,将功率信号转换成电信号送至模糊PID控制器中,模糊PID控制系统将设定的功率值r(t)与反馈的功率值y(t)计算出偏差e(t)以及偏差变化率ec(t),根据模糊规则进行模糊推理,进行解模糊运算,得出PID控制的比例,积分,微分系数的修正值Kp、Ki和Kd,由PID控制器得出的控制量对变频器进行控制,改变驱动电动机的转速,从而调整搅拌机驱动电动机的功率,使搅拌机控制系统在恒功率下稳定工作。
3 模糊PID控制器的设计
3.1 输入输出量的模糊化
根据搅拌机模糊PID控制原理图可知,确定系统为两输入三输出的模糊控制器,选择设定的功率值r(t)与反馈的功率值y(t)之间的偏差e(t)和偏差变化率ec(t)为输入量,以PID的参数修正值Kp、Ki和Kd为输出量。首先将e(t)和ec(t)通过各自的量化因子转换为模糊论域,输入量e(t)和ec(t)的语言变量为E和EC,输出量的语言变量为KP、KI、KD,其输入量和输出量的基本论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};描述输入量和输出量语言值的模糊子集均为{负大(NB),负中(NM),负小(NS),零(O),正小(PS),正中(PM),正大(PB)};采用三角形和Z型函数作为输入量和输出量的隶属度函数,如图2所示。
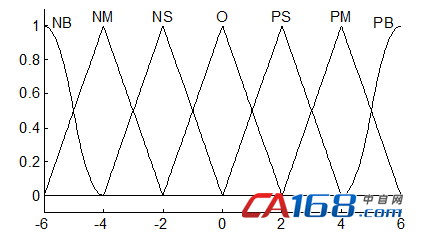
图2 输入量和输出量隶属度函数
3.2 建立模糊控制规则
根据对搅拌机作业过程的观察以及操作者的大量实践经验,制定了一系列推理语言规则,如
If E=(NB) and EC=(NB) then (KP=PB)(KI=NB)(KD=PS)
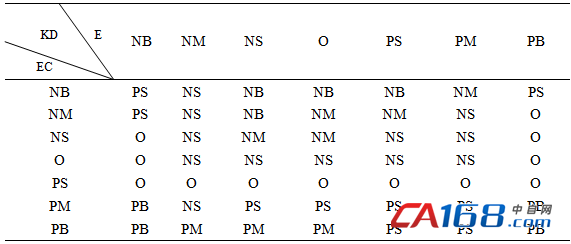
将这49条推理语言规则定义为模糊控制规则表,如表1-1、表1-2、表1-3所示。
表1-1 KP控制规则表
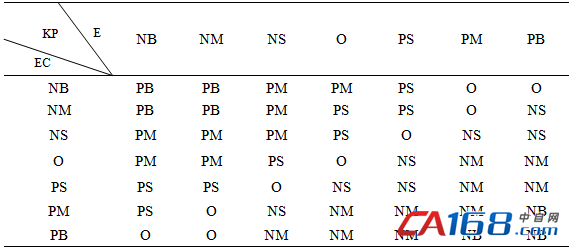
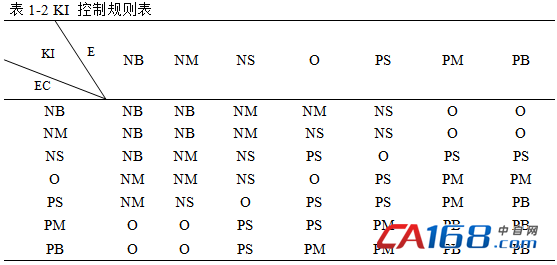
表1-3 KD控制规则表
将这49条模糊控制规则键入Simulink中,由此建立的模糊系统曲面观察图如图3所示。
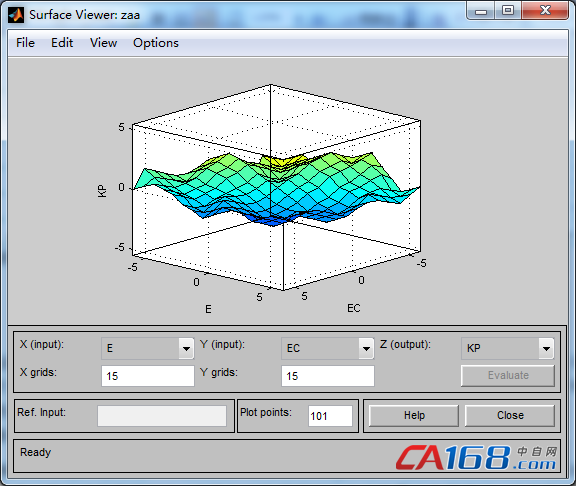
图3 模糊系统曲面观察图
通过图3分析图形特点,可以看到它有明显的梯度分布,说明所设计的模糊系统从误差和误差变化到三个PID参数变化量的模糊映射与理论设计匹配良好。因而,所设计的模糊控制器合格。
3.3 模糊量的判决方法(解模糊)
模糊控制器的输出是一个模糊集,它包含控制量的各种信息,但被控对象仅能接受精确的控制量,所以进行模糊判决,常用的三种模糊判决方法有最大隶属度法、中位数判决法以及加权平均判决法(重心法)。本控制系统采用加权平均判决法(重心法)进行模糊量的判决,以输入量E=1.273,EC=0.6154为例,解模糊过程如图4所示。
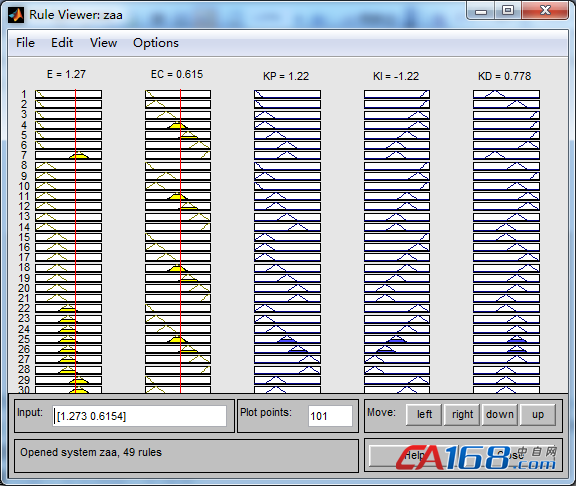
图4 解模糊过程图
参见图4所示,利用加权平均判决法,在E=1.273,EC=0.6154时可推得:KP=1.22,KI=-1.22,KD=0.778。设PID控制器的初始值为KP1=6,KI1=3,KD1=2,则经过解模糊,得出PID控制器的修正值Kp=7.22,Ki=1.78,Kd=2.778。
3.4 量化因子及比例因子的选择
设计一个模糊控制器除要有一个好的模糊控制规则外,合理选择模糊控制器输入变量的量化因子Ke和输出控制量的比例因子Ku也是非常重要的。[3]量化因子和比例因子的大小及其不同量化因子之间大小的相对关系,对模糊控制器的控制性能影响极大。量化因子和比例因子的选择并不是唯一的,可能有几组不同的值,都能使系统获得较好的响应特性。
4 模糊PID控制系统仿真分析
搅拌机系统是一个非线性的被控对象,一般看作是二阶系统,选择被控对象的传递函数为![]()
根据上面所述模糊PID控制器的设计,本系统采用MATLAB/Simulink仿真平台,Matlab提供了基本仿真模块库 Simulink以及配合其他工具箱的一系列仿真模块库[4]。设置模糊PID控制器中初始PID的参数为:KP1=6,KI1=3,KD1=2,为更好地显示模糊PID控制的控制效果,将其仿真模型同常规PID控制放在一起,如图5所示。
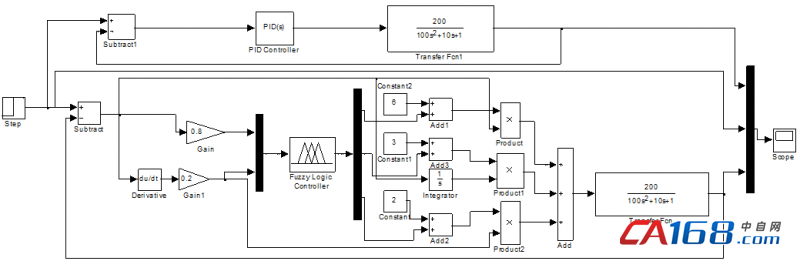
图5 仿真模型
在MATLAB环境中对系统进行仿真,用示波器scope观察输出情况,系统的阶跃响应曲线如图6所示。
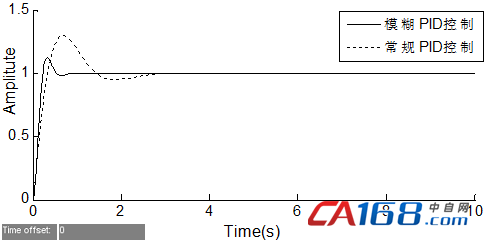
图6 搅拌机控制系统的仿真曲线
由分析结果可知,模糊PID控制较常规PID控制具有超调量小、响应速度快、振荡小,系统稳态精度高的优点,能够很好地满足搅拌机在恒功率下工作的控制要求。
5 结束语
将模糊PID控制方法应用到搅拌机控制系统上,主要用来控制搅拌机工作负荷稳定,即控制驱动电动机的功率恒定。模糊PID控制方法是建立在常规PID控制方法基础上,通过计算功率偏差e(t)和功率偏差变化率ec(t),利用模糊推理在动态过程中改变PID的参数,这样能够很好地克服搅拌机驱动电动机功率非线性、时变等因素的干扰影响。运用MATLAB/Simulink对控制系统进行仿真,仿真结果表明系统超调量小、响应速度快、振荡小,稳态精度高,满足搅拌机在恒功率下工作的控制要求。
参考文献
[1] 王立花,郑世奇. 浅谈混凝土搅拌机的结构特点及性能设计[J].科技与企业,2014,(16):449.
[2] 窦艳艳,钱蕾,冯金龙.基于Matlab的模糊PID控制系统设计及仿真[J].电子科技,2015,(02):119-122.
[3] 席爱民.模糊控制技术[M]. 西安:西安电子科技大学出版社,2008.
[4] 李晓丹.模糊PID控制器的设计研究[D].天津大学,2005.
作者简介
郭唤唤 (1990-) 女 工学学士 研究生在读 研究方向:机电一体化方向




共0条 [查看全部] 网友评论