



关键词:清洗 PLC 控制 硬件 软件
Abstract: With the development of society, people's living standards have been improved and the quality of life improved, more and more attention to the development of intelligent. Nowadays, high - rise buildings, need to clean the high - level glass regularly, but the high-altitude operation will bring human life safety problems, which needs to create a robot that can replace the artificial operation to meet the needs of people. The PLC control system of the cleaning robot for high- level glass curtain wall is designed, and the composition of the control system, the basic function of the robot body, the selection of hardware and the software design of the control system are introduced.
Key words: Cleaning PLC Control Hardware Software
【中图分类号】TP242 【文献标识码】A 文章编号1606-5123(2017)07-0000-00
1 引言
21世纪,随着生活水平不断提高,人们对生活质量及工作环境的改善越来越重视。以前对高层玻璃的清洗维护都是人工操作,这避免不了会给清洗工人带来生命危险。随着机器人技术的发展,开发和研制一种能代替人工完成对高层玻璃的清洗及维护工作的机器化机械装置受到人们的关注。本文通过对PLC硬件结构和控制方式的研究及控制系统软件的设计,成功的将PLC应用于清洗机器人的控制部分,这为以后智能机器人的发展奠定了基础。
2 系统原理设计
2.1 控制系统
控制系统就像人的大脑神经中枢一样,控制和支配机器人完成所需工作。对于清洗机器人来说,能够完成吸附、移动、清洗及清洗液的循环利用的工作,并使整个工作流程有条不紊的进行,保障控制系统协调统一。
由于机器人的工作环境比较特殊,完成整个高空作业有一定难度,这就需要控制系统具有较高的控制精度,较强的抗干扰能力,较高的执行效率,且易于维护等特点,其整个控制系统包括清洗机器人本体控制系统、楼顶保障控制系统和地面遥控系统三部分。在整个清洗过程中,地面遥控系统能够调控清洗机器人高空作业的进度,操作者提供控制面板输入信号指令,通过无线通讯模块将信号指令传送给机器人本体控制系统和楼顶保障控制系统,并分别完成各自工作,其中机器人本体控制系统完成吸附、移动、清洗和清洗液循环等工作,楼顶保障控制系统完成各种后勤及安全保障的工作;为了实时观测其工作状态,清洗机器人本体还安装了检测装置,像感应开关、障碍检测传感器能实时采集其工作情况和感知周边环境等信号,并将信号传递到地面遥感系统,操作者可以通过显示器观测机器人的清洗情况。
2.2 机器人系统
为了设计出满足人们需要的控制系统,首先要了解清洗机器人本体的基本功能。其基本功能模块如图1所示。
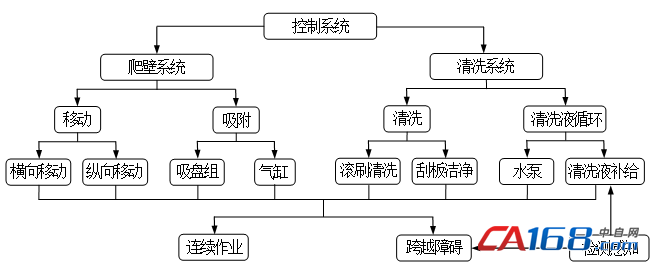
图1 基本功能模块
清洗机器人本体主要完成两大任务:一是通过移动机构和吸附机构相互配合实现机器人本体的循环交替,并通过及检测装置来检测工作状态及周围环境,来完成相应的爬壁任务;二是通过滚刷和刮板的机械摩擦以及清洗液的喷洒来完成清洗工作,清洗液循环装置能够实现清洗液的喷洒及污水回收、过滤以便循环再利用,利用液位开关检测液位,并对清洗液进行随时补充。
3 系统实现设计
3.1 传感器的选取
清洗机器人本体的自主避障功能是通过传感器来感知周围环境变化来实现的。常用的探测障碍传感器有光电传感器和超声波传感器,考虑到清洗机器人的高空作业环境在室外,经常遇到各种天气,为了准确感知周围环境的变化,应尽量排除光照因素的影响,使机器人能精准避障,所以本文选择超声波传感器对外界环境进行实时检测,根据超声波回波测位原理,能够精确确定位置,具有广泛适用性,且不易受光线雾霾等外界因素的影响。
3.2 控制器的选取
机器人本体的控制系统选用可编程控制器(Programmable Controller,简称PLC),将其直接安装在机器人本体上,可以实现对清洗机器人本体的移动、吸附、清洗和清洗液循环等具体动作的控制和调整。
PLC按结构形式的不同可分为整体式和模块式两类。整体式PLC是将电源、CPU、I/O接口等部件集中安装在一个机箱内,具有结构紧凑、体积小和价格低的特点;模块式PLC是将各个组成部分分别作为若干个独立模块,主要有CPU模块(包含存储器)、输入/输出模块、电源模块以及其他各种模块直接插入机架底板的插座上即可,这种结构形式配置灵活,装配方便,便于扩展,一般多应用于大中型设备。 PLC的基本结构如下图2所示。
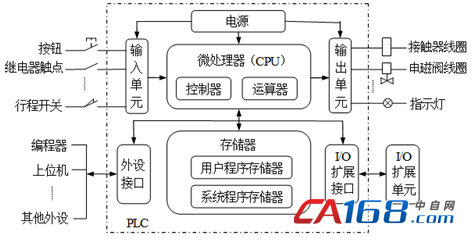
图2 PLC的基本结构
PLC作为清洗机器人本体的控制单元,图中很清晰地表示出了输入/输出的开关量,控制器选取的重要依据就是这些开关量的数量。综合清洗机器人本体的功能和控制需求以及数字量输入/输出的点数来进行控制器的选型,经验证西门子S7-200 CPU224的PLC符合要求,此型号的PLC可靠性高、抗干扰能力强,且易扩展。
根据S7-200 CPU224 PLC主机数字量输入点数为14个,数字量输出点数为10个,来选取扩展模块为8输入/8输出EM223数字量混合模块,主其编址情况如图3所示。
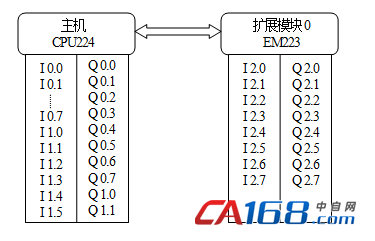
图3 控制器的编址
3.3 控制系统软件的设计
根据清洗机器人本体控制系统中控制器的型号和扩展模块的类型以及各类被控制对象的输入/输出信号分配硬件资源,并使用梯形图语言进行PLC程序的编写,其中编程元件的地址分配表如表1所示。
表1 编程元件地址分配表
|
Input address |
Input device |
Output address |
Input device |
|
I0.0 |
清洗机器人本体启动按钮 |
Q0.0 |
启动指示灯 |
|
I0.1 |
清洗机器人本体停止按钮 |
Q0.1 |
停止指示灯 |
|
I0.2 |
内框架腿部气缸伸出磁性开关 |
Q0.2 |
纵向驱动装置步进电机驱动器PUL+ |
|
I0.3 |
内框架腿部气缸缩回磁性开关 |
Q0.3 |
纵向驱动装置步进电机驱动器DIR+ |
|
I0.4 |
内框架真空回路真空压力开关 |
Q0.4 |
纵向驱动装置步进电机驱动器ENA+ |
|
I0.5 |
外框架腿部气缸伸出磁性开关 |
Q0.5 |
横向驱动装置步进电机驱动器PUL+ |
|
I0.6 |
外框架腿部气缸缩回磁性开关 |
Q0.6 |
横向驱动装置步进电机驱动器DIR+ |
|
I0.7 |
外框架真空回路真空压力开关 |
Q0.7 |
横向驱动装置步进电机驱动器ENA+ |
|
I1.0 |
纵向驱动装置上限位开关 |
Q1.0 |
清洗机构滚刷电机接触器 |
|
I1.1 |
纵向驱动装置下限位开关 |
Q1.1 |
清洗液循环装置水泵接触器 |
|
I1.2 |
横向驱动装置左限位开关 |
Q2.0 |
内框架腿部气缸伸出电磁阀 |
|
I1.3 |
横向驱动装置右限位开关 |
Q2.1 |
内框架腿部气缸缩回电磁阀 |
|
I1.4 |
上刮板气缸缩回磁性开关 |
Q2.2 |
内框架真空发生器电磁阀 |
|
I1.5 |
下刮板气缸缩回磁性开关 |
Q2.3 |
外框架腿部气缸伸出电磁阀 |
|
I2.0 |
水箱液位开关(上限) |
Q2.4 |
外框架腿部气缸缩回电磁阀 |
|
I2.1 |
水箱液位开关(下限) |
Q2.5 |
外框架真空发生器电磁阀 |
|
I2.2 |
超声波传感器I |
Q2.6 |
上刮板气缸缩回电磁阀 |
|
I2.3 |
超声波传感器II |
Q2.7 |
下刮板气缸缩回电磁阀 |
|
I2.4 |
超声波传感器III |
|
|
|
I2.5 |
超声波传感器IV |
|
|
|
I2.6~ I2.7 |
备用 |
|
|
4 结束语
本文针对高空作业清洗机器人PLC控制系统的设计,首先介绍了控制系统的组成,然后了解清洗机器人本体的基本功能,最后对机器人本体控制系统的硬件进行了选取及软件的设计。高空作业清洗机器人的发展为以后人们的生活带来极大地方便。
参考文献
[1] 杨和进.新型壁面移动机器人越障机构的研究[D].黑龙江哈尔滨:哈尔滨工业大学,2007.
[2] 王苗苗,王胤卓,张家铭等.基于PLC的爬壁机器人的系统研究[J].电脑知识与技术,2015(4): 191-193.
[3] 鲁远栋. PLC机电控制系统应用设计技术[M].北京:电子工业出版社,2010,62-63.
[4] 沈青青.磁粉探伤爬壁检测机器人研究[D].黑龙江哈尔滨:哈尔滨工业大学,2012.
[5] 刘淑霞,刘淑良,徐殿国等.CLR-II壁面清洗机器人控制系统的设计[J].
作者简介
袁玉荣(1988-) 女 工学硕士 硕士研究生 研究方向:机构创新与机器人技术方向






共0条 [查看全部] 网友评论