



关键词:自动化验机械臂 智慧工厂
Abstract: In this paper,the automatic test of mechanical arm can be carried out in three-dimensional linear motion. The location of the test tube is arranged in the working range of the manipulator according to the matrix. Therefore, it is small in size, large in capacity and high in flexibility. The project uses the embedded system driven manipulator, sampling device is fixed at the end of manipulator driven by pump, test results in part by the color sensor and embedded system connected, embedded system all with computer through the serial port connection, controlled by PC software. The experimental results show that the automatic test arm has the advantages of high efficiency, good stability and high accuracy, and has high practical value.
Key words: Automatic test arm Intelligence factory
【中图分类号】TP242 【文献标识码】B 文章编号1606-5123(2017)07-0000-00
1 引言
现在很多工厂都有自己的化验部门,化验部门的操作员要经过专业的培训才能上岗,而且每天要处理大量的样品。目前我国大部分的化验还是依靠人力来解决,但化验的过程单一重复,完全可以用机械臂代替。采用机器人的智慧工厂可以将人力从重复劳动中解救出来。机器人虽然不如人类劳动智能,但其可重复性好、精度高,它可以把每一次的化验过程都都控制得非常相似,甚至连移动轨迹都控制在
2 目的意义
参见图1所示,自动化验机械臂设计的主要任务是完成机械臂的硬件以及嵌入式部分的设计、颜色传感器的嵌入式设计、上位机的软件设计。机械臂的硬件以及嵌入式部分的设计需要对机械臂的坐标形式、自由度、驱动机构等进行确定并完成单片机内部的相关程序的编写,其主要功能是完成对机械臂末端执行器的控制,完成指定的动作。颜色传感器的嵌入式部分设计包括颜色传感器驱动程序设计以及与上位机通信设计,其主要功能是获取化验结束的试管颜色信息。上位机的软件设计包含对机械臂的控制软件部分、读取机械臂状态部分、

图1 项目结构
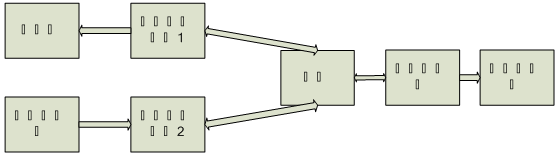
图2 系统结构示意图
3 解决方案
3.1 机械臂的硬件以及嵌入式部分的设计
机械臂的硬件以及嵌入式部分的设计需要对机械臂的坐标形式、自由度、驱动机构等进行确定并完成单片机内部的相关程序的编写。在这个项目中我们选取三自由度机械臂,虽然自由度较少但已经可以满足在空间中移动的要求,而且其控制简单稳定,易于后期控制和开发。我们将机械臂放入空间直角坐标系中,通过控制三个自由度的电机来驱动机械臂末端到达指定空间位置。其对应的嵌入式部分需要实现以下功能:
(1)驱动机械臂到达指定位置参见图3所示。

图3 试管架
本项目采用3×6的试管架,试管与试管之间的横纵距离都为2.2cm,试管高度为18cm,设到达的试管对应位置为(x,y),则x取值范围为0~5,y的取值范围为0~2,(0,0)号试管对应(220,80),对应位置的二维坐标可表示为(220-2.2*x,80-2.2*y),通过嵌入式系统控制机械臂到达该坐标即可使机械臂末端对应相应的试管。
(2)控制机械臂下降和抬升:该项目使用的注射器连同针管高度为12cm,机械臂末端连在距注射器上部4cm处、距针管底部8cm处,为使针管离开试管口则机械臂末端高度应大于26cm,为了安全起见这里取30cm。控制坐标设为(x,y,1),其中(x,y)为对应试管坐标,“1”为抬升状态,对应空间三维坐标为(220-2.2*x,80-2.2*y,30)。为使针管进入试管口并尽可能的深入则机械臂末端高度应在18cm附近,为了安全起见这里取20cm。控制坐标设为(x,y,0),其中(x,y)为对应试管坐标,“0”为下降状态,对应空间三维坐标为(220-2.2*x,80-2.2*y,20)。
(3)控制气泵吸液或排出液体:注射器由气泵驱动,气泵吸气则注射器吸入液体,气泵出气则注射器排出液体,气泵关闭则注射器停止液体流入流出,参见图4所示。
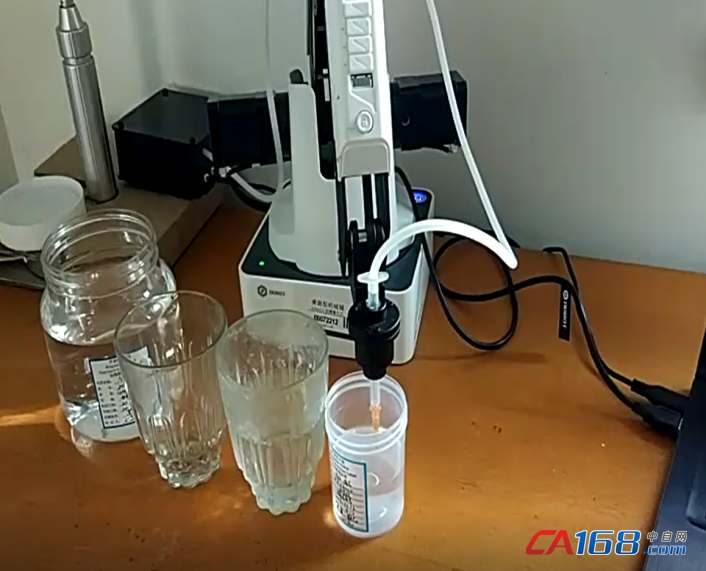
图4 机械臂吸取液体
(5)读取机械臂状态:机械臂的状态可以由三个电机的转动的角度决定或者直接由机械臂末端在空间中的位置确定。因此可以读取的机械臂状态信息有电机状态(J1,J2,J3)机械臂末端位置(X,Y,Z)。
3.2 颜色传感器的嵌入式部分设计
使用串口一与上位机进行通信。均采用9600bps波特率,8位数据位,一位停止位,无校验位。将采集的中心点的三原色分量,通过串口按“start rmax gmax bmax end”格式发送,参见图5所示。
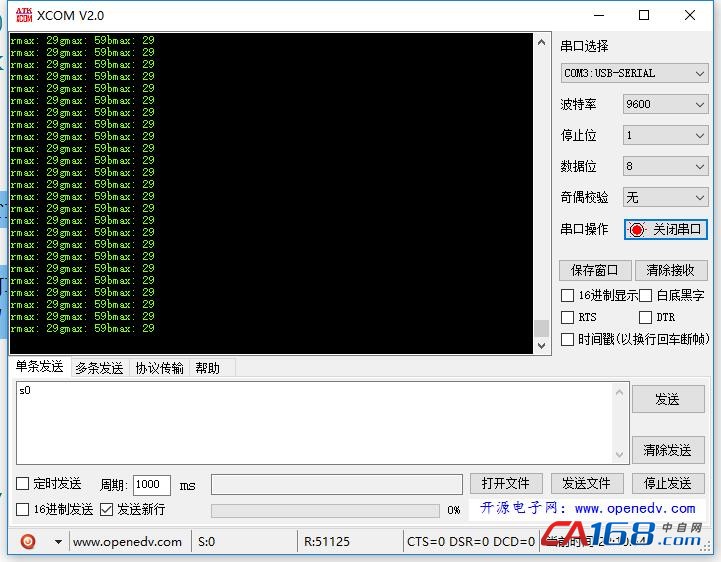
图5 颜色传感器嵌入式板返回信息
3.3 上位机功能描述
上位机软件截图参见图6所示。
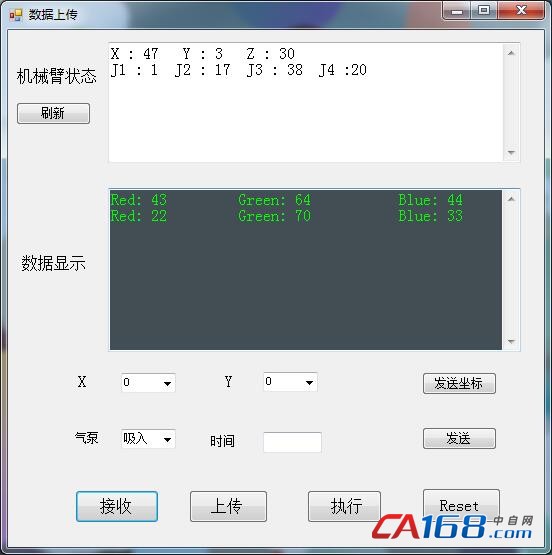
图6 上位机软件截图
上位机功能描述:
(1)发送坐标:需要选择x,y的值,分别代表试管的坐标,发送后机械臂会运动到指定的试管处。
(2)发送:需要选择气泵的状态,有吸入、排出、关闭三种状态,填写持续的时间,发送后机械臂会执行相应的动作。
(3)接收:实时接收来自com3端口的数据,表示物体的r,g,b三原色数值,并显示出来。
(4)上传:上传实验数据,保存到服务器上。
(5)Reset:让机械臂复位。
(6)刷新:刷新机械臂当前的坐标。
(7)执行:上位机发送命令给嵌入式开发板,顺序执行以下命令。
①机械臂驱动注射器吸取定量化验试剂,将化验试剂注射到反应试管;
②机械臂驱动注射器放入盛放清水的试管,清洗注射器;
③机械臂驱动注射器吸取定量样品,将样品注射到反应试管;
④机械臂驱动注射器放入盛放清水的试管,清洗注射器,机械臂回到零点位置;
⑤待反应结束,用传感器采集反应试管的信息,将反馈的信息传给上位机。
3.4 上位机功能实现
(1)采用c#语言编写程序,IDE为Microsoft Visual Studio2015。
(2)服务器采用Azure,Windows 7系统,数据库为SqlServer 2008。
(3)数据接收接口采用jsp语言编写。
(4)查看数据:数据上传的后台地址为http://www.myangs.com:8080/ms_data.txt
每次点击上传按钮后,会上传到这个地址,可以打开验证数据是否上传成功。
第一行为IP地址,第二行为时间,第三行为数据,参见图7所示。
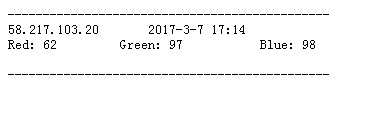
图7 服务器数据查询
4 实验验证
本实验采取最常用的酸碱指示酚酞剂遇碱变红实验来测PH值的实验,按以下顺序执行指令参见图8所示,实验所用的装置整体图参见图9所示。
(1)机械臂复位;
(2)取5ml一号试管的酚酞放入二号试管;
(3)取5ml一号试管的酚酞放入三号试管;
(4)取5ml四号试管的氢氧化钠溶液放入二号试管;
(5)取5ml五号试管的次氯酸溶液放入三号试管;
(6)待反应结束,用传感器采集反应试管的信息,将反馈的信息传给上位机。
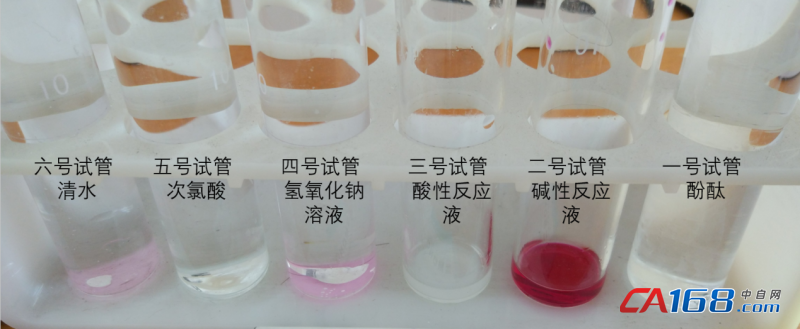
图8 实验所用的试管
二号试管的反馈信息为“red:54,green:29,blue:25”
三号试管的反馈信息为“red:27,green:24,blue:22”
可以明显看出二号试管红色分量远超常值,显碱性。
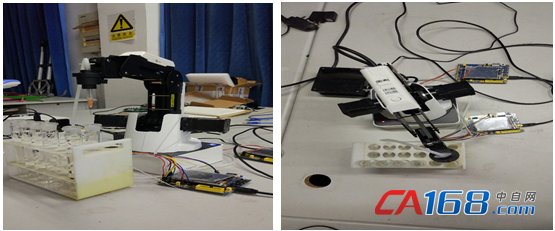
图9 实验所用的装置整体图
5 结束语
本文提出了一种机械臂代替人工进行自动化验的方案。首先阐述了这个项目由三个部分构成:机械臂的硬件以及嵌入式部分的设计、颜色传感器的嵌入式设计、上位机的软件设计,之后分别介绍了各个部分的功能。最后应用该项目代替人工完成一个具体的实验,实验结果表明自动化验机械臂具有效率高、稳定性好、精确度高等优点,有很高的实际应用价值。
参考文献(略)






共0条 [查看全部] 网友评论