



关键词:Labview Matlab 电液伺服 机器人
Abstract: Modeling and dynamic simulation of robot electro - hydraulic servo control system by Labview and. The dynamic simulation of electro - hydraulic servo control system is carried out by using simulation software such as Labview and Matlab / Simulink. The simulation results show that the electro-hydraulic servo control system in this paper has the advantages of large output power, fast response speed and precise control, and it is very important to improve the design of the later system and improve the reliability of the system.
Key words: Labview Matlab Electrohydraulic servo Robot
【中图分类号】TP242 【文献标识码】B 文章编号1606-5123(2017)07-0000-00
1 引言
电液伺服系统是依据液压原理,采用电液伺服机构组成的一种控制系统。
目前,因电液伺服控制系统具有调速范围广、耐用性高、响应速度快、功率大等特点,因此在工程机械、车辆船舶和武器系统等多方面得到了广泛的应用。为方便对电液伺服控制系统进行的分析和控制,需要构造出精确的电液伺服控制系统的数学模型,但由于液压系统所具有的电磁转换、流量-压力曲线、饱和摩擦和液体压缩等众多非线性控制因素,使其很难得到电液伺服控制系统的精确数学模型[1]。
目前解决位置跟随问题主要采用电液位置伺服系统,其根本目的是通过机械执行机构完成被控量对给输入的实时和准确的跟踪,并保证足够的控制精度要求。电液伺服控制系统的动态特性作为衡量电液伺服控制系统调试和设计的重要水平指标,包含信号处理系统和液压元件等组成,元器件间的动态性能相互制约,相互影响以及系统自身所包含的非线性特性,致其动态性能更加复杂。因此,电液伺服系统的设计以及仿真研究越来越受到重视[1-2]。
本文通过比例方向阀来完成对伺服油缸的准确位置控制,并使用位移传感器组成一套闭环位置控制系统。使用NI公司的数据采集卡对实验数据进行采集和输出数据的控制等功能,采用MATLAB和LABVIEW混合编程来实现准确位置控制定位功能。
2 液压系统
当前液压技术的快速发展和应用领域的不断扩大,现代对液压系统的动态特性进行研究,熟悉液压系统的参数变化和动态特性,对提升控制系统的控制精度和响应特性是非常重要的。
液压系统的动态特性是指其在对原状态失去平衡后从新达到新状态过程所表现出来的动态特性,其主要是由外界干扰或控制与传动系统的过程变化引起的。在此过程中,控制系统各个变量随时间变化的性能,对系统动态特性的优劣起决定作用。控制系统的动态特性主要体现为过渡过程品质(控制、执行机构的响应特性和响应速度)和稳定性(控制系统中压力的峰值与波动情况)问题。
目前液压控制系统的动态特性研究方法主要包括:模拟仿真法、传递函数分析法、数字仿真法和实验研究法等。数字仿真法是使用计算机控制技术对液压系统的动态特性进行研究的一种方法。首先建立液压控制系统的动态数字模型——系统的状态方程,然后在计算机上利用相关软件计算出控制系统中的变量在动态过程中的时间域解。该研究方法主要适用于非线性和线性系统,可在输入函数的作用下对系统的各参数变量变化情况进行模拟,从而对系统的动态过程进行全面、直接的了解,方便研究人员在设计的初步阶段对液压系统的动态性能进行预测,并对设计的结果进行验证和改进,从而保证系统的可靠性和工作性能,使控制系统具有适应性强、精确高、费用低和周期短等优点[2-3]。
3 电液伺服
3.1 系统组成及原理
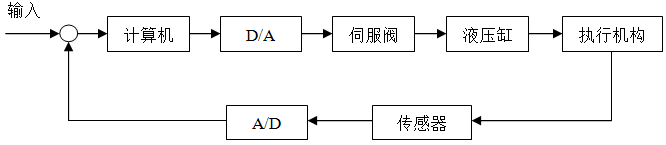
图1 电液位置伺服控制系统结构图
3.2 电液伺服位置控制系统建模[3]
在建立电液伺服位置系统的传递函数时,需要结合牛顿定律、连续性方程等物理法则,分别对液压缸、伺服阀等各个环节建立相关的函数表达式,并联立求出控制系统的传递函数。需要对伺服阀的流量方程、伺服阀的方程、力平衡方程和连续性方程进行建立。
3.2.1 伺服阀方程
伺服阀指具有复杂高阶的非线性特性的器件。在实际应用中,通常可将伺服比例阀简化等效成为一阶系统(低频)或二阶系统(高频):

上式中:u是电压控制信号,Q是伺服阀的输出流量,Kv是伺服阀的增益,τv是伺服阀的时间常数。

上式中:ζn是伺服阀的阻尼系数,ωn是伺服阀的自然频率。
可以通过厂商提供的相关手册查阅获得伺服阀的带宽、阻尼系数、增益和自然频率等参数,从而得到相当准确的伺服阀传递函数表达式。在自动定深电液位置伺服系统中,伺服阀阻尼系数和时间常数较小,可忽略伺服阀的动态特性,从而可得到伺服阀的输入信号u与阀芯位移的关系:
xv= Kvu
上式中:xv是伺服阀芯的位移,u是控制电压信号。
3.2.2 伺服阀流量方程
为对伺服阀的流量方程进行确认,先假设伺服阀控制窗口是配作的且对称的,油源的压力恒定。线性化的伺服阀流量方程可表示为:

上式中, P1和 P2表示进油和回油的压力,Q1和Q2表示进油和回油的流量,Kc是伺服阀的流量-压力系数,Kq为伺服阀的流量增益。
通过上式可得到负载流量方程:
![]()
其中: QL是负载的流量, PL是负载的压差。
3.2.3 连续性方程
为对液压缸的连续性方程进行确定,先假设液压缸的各处压力一直相等,并没有空穴或饱和现象,液压油的流动速度很小,且没有管道现象发生,密度和温度也都是常数。对每个活塞腔的应用连续性方程可表示为:


上式中:Cip是活塞内部的泄露系数,V1和V2是进油腔和回油腔的体积,Cep是活塞外部的泄露系数,βe是系统的有效容积模数。
通过控制系统设定的参数和查阅相关伺服阀的样本,计算出负载的弹簧Ks=180000N/cm时,系统传递函数中的相关参数:放大器增益ωr=0.588rad/s,Ka=40000mA/V,ωm=200rad/s,ω0=674rad/s和ξ0=0.005。再根据液压伺服系统的各环节传递函数,建立simulink系统动态模型如图2所示。
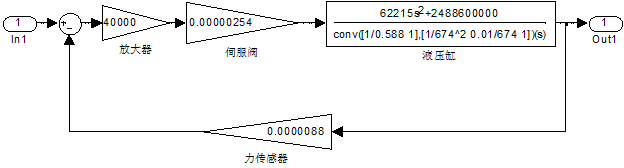
图2 系统simulink的动态仿真模型
4 软件设计
利用虚拟仪器LABVIEW的在线控制,首先采集位移传感器的位移数据将其转换为电压信号,送入到数据采集卡模拟量的输入端AI,在labviEW程序中对模拟的输入通道进行设置,包括设置采样的通道号、最小最大值和采样的方式(差分、单端),并输出相应的采样波形。在PID算法对P、I、D的参数和输出的上下限进行设定[4]。然后对模拟量的输出进行设置,输出口设置为A0口,并对输出的最大最小值进行设置。经运算后将得到的数值送到伺服放大器的输入端,从而驱动伺服阀,使液压油缸进行相应动作,进而完成对电液伺服系统的位置控制。如图3所示为数据采集系统的流程图。

图3 采集系统流程图
5 MATLAB仿真
采用MATLAB建立基于多层的前向神经网络构造的电液伺服控制系统的智能模型,其中隐含层的节点数为8,训练的次数设定为1000次[5]。由于神经网络的初值参数不确定,因此会造成网络的性能不同,因此神经网络的训练次数为10次,均方根误差等相关的性能指标取其平均值。采用神经网络可较好的对电液伺服控制系统动态特性进行拟合,且组建的模型具有较好的泛化能力。如图4所示为电液伺服系统神经网络输出值和实际值。
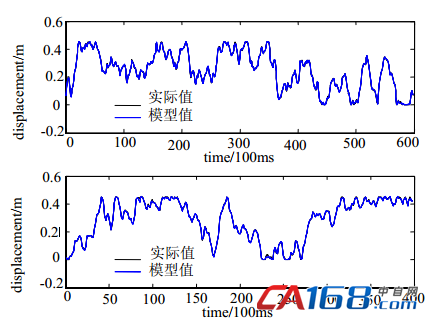
图4 电液伺服系统神经网络输出值和实际值
6 结束语
本文所采用智能建模和机理建模方法为实现电液伺服控制系统的建立打下了基础。通过建模和仿真结果表明,对该系统进行正确的数学模型建立和分析仿真,对控制系统的动态特性进行分析,可很好的预见系统的输出变化,从而达到对控制系统工作状态的了解,提升设计和分析控制系统的效率。
参考文献
[1]李叶妮,林少芬,陈水宣.基于LabVIEW的液压伺服测控系统开发[J];重庆理工大学学报(自然科学);2012,08,70-73.
[2]孙衍石,靳宝全,熊晓燕.电液伺服比例阀控缸位置控制系统仿真研究[J].流体传动与控制,2009(7):32-35.
[3]王春行.液压系统建模与仿真[M].北京:冶金工业出版社,2003.
[4]金志强.一种基于LABVIEW的PID控制器设计的方法[J].控制系统,2005,6:1-2.
[5]郭凌龙.基于AMEsim与Matlab联合仿真的电液伺服控制系统研究[J];科技情报开发与经济;2011,16:148-150.
作者简介
姜洪发 (1983-) 男 工学学士 工程师 研究方向:自动控制工程领域






共0条 [查看全部] 网友评论