


未来

是不是你也看过这样的科幻片?实际上在不久将来,的确会有很多“长得一样”的“组装人员”,他们不是克隆人,而是机器人。而在机器人边上还会有工人,他们和机器人配合,一起完成工作。多么和谐的一幅画面啊!工人和机器人的零距离协作,简称人机协作,未来智能工厂不可或缺的一部分。当然,面对未来人机协作的趋势,公众也有不少疑问,我们一一来看:
人机
工业领域机器人用量增加背后的原因是什么?在批量生产规模不断缩减的时代,定制化的生产开始翘头,因此生产过程需要具备更大的灵活性:不论在什么情况下,制定生产过程中的各个生产步骤时,都要尽量灵活,而人机协作提供了这种灵活性,可以快速对生产进行调整。
伤害
安全有多么重要?工人与机器人的零距离,虽然提高了生产效率,但人机之间势必会有“摩擦”甚至“伤害”。因此,“安全性成为首要考虑因素”。国际标准ISO/TS 15066列举了与人体接触时允许施加多大的力或压强。这些限制取决于具体的身体部位。作为安全功能的组成部分,控制部件(例如力矩监控器或速度监控器)显然亦须满足标准要求。
协作
协作形式有哪些?人机之间有四种不同类型的协作形式:第一种,安全受监控停止。在此情况下,如果工人进入共享工作空间,机器人便会停机,一旦工人离开共享工作空间,机器人可以自动重新启动。第二种,手持引导。机器人的运动由人工手持进行引导控制。第三种,速度和距离监控。在这种类型中,机器人防止人机接触,实现方式为,当机器人和工人互相靠近时,机器人降低速度,然后当双方互相离开时,再次提高速度。第四种,功率和压力限制,这是目前最创新的方式。在这种类型中,通过技术手段将工人和机器人之间的接触力限制在无害水平。因此功率和压力限制日益成为人机协作安全实施的重要趋势。但是采用上述前三种协作类型的传统工业机器人还会继续存在。

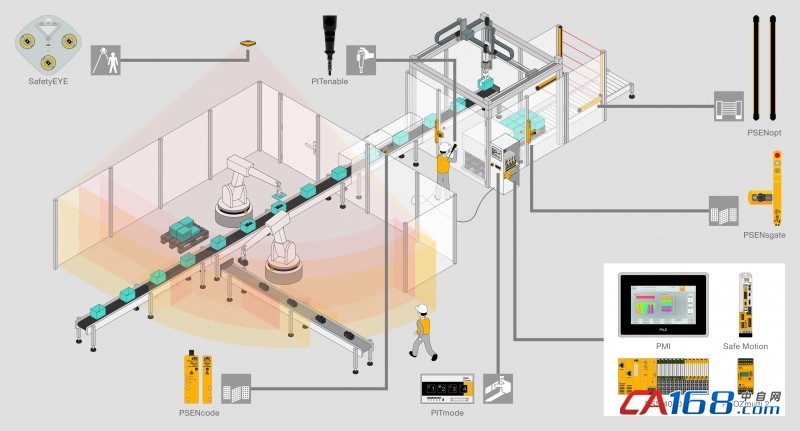
人机协作如何实现安全?协作形式不同,实现安全的方式也不相同。针对前三种比较传统的协作形式,皮尔磁可提供两种安全方案。一种是使用各类安全开关、光栅、扫描仪等安全传感器产品,监控人员是否进入共享区域。一旦进入,机器人将停止或减速。
SafeyEYE
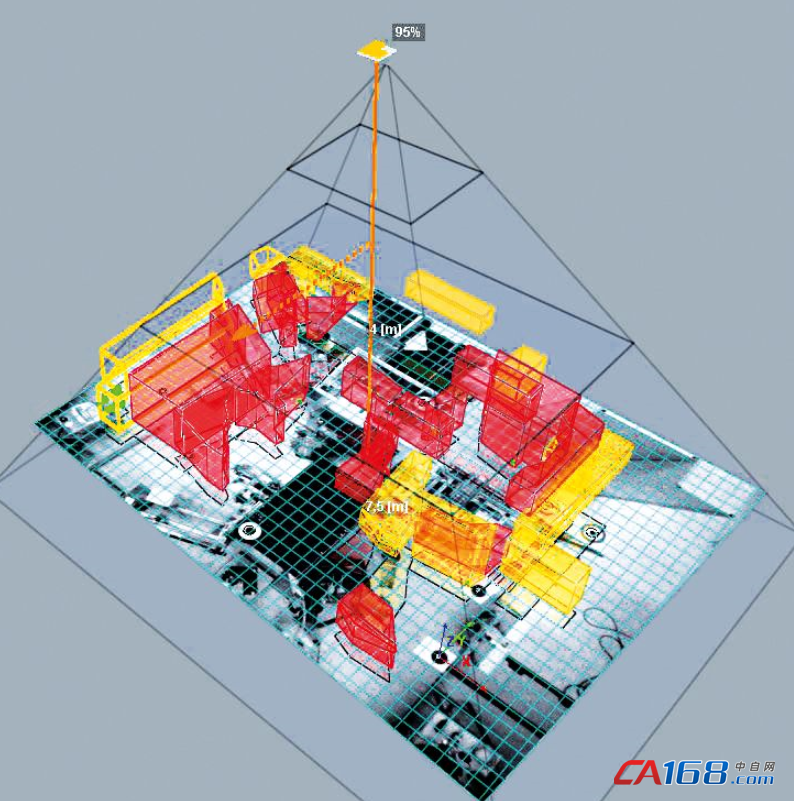
另一种方案更为灵活高效,不需要围栏将机器人围起来,也不需要采购各类安全传感器产品。只需使用皮尔磁首创的3D照相系统SafeyEYE,将其置于机器人工位的顶部,即可对下方的整个区域进行监控,并可将监控区域划分为警报区和保护区,人员进入警报区会触发报警,但机器人不会停止,而一旦进入保护区,则机器人立即停止。
轻手 轻脚
而第四种协作形式,也就是采用机器人的功率和压力限制的方式,是个全新概念,这些带限制的机器人近年来也是在市场上爆发式涌现,我们称之为“协作机器人”。它们工作时“轻手轻脚”,看似不会伤害到工人,但实际上是否真的不会造成伤害,是否真的满足相应标准?这些都需要专业的验证。皮尔磁研发了创新的力和压强测量系统PROBms,可测量机器人对人体施加的力和压强,确保不超过上限值,即使碰撞也不会造成伤害。

皮尔磁的力和压强测量系统PROBms可在全球租用。租用理念包括维护、校准和定期更新,因此用户总能使用功能完善、技术先进的测量系统。人机协作流程改变时所需的重新测量可随时独立进行。从而提高机器人应用的可用性和生产力。

未来,分布式控制、人机协作都使得生产更灵活,更高效,定制化产品成为可能。但请别忘了——安全是首要考虑因素。




共0条 [查看全部] 网友评论