



Abstract: In the field application of the shore power system, to ensure the uninterrupted power supply on the ship, it is required to transfer the ship power load smoothly to the shore power system. In parallel process, the active and reactive power (PQ) droop control algorithm is used to realize the dynamic balance between the ship and shore power. In order to improve the stability of the system, the shore power system based on the traditional voltage and current double loop control is added to the output DC component suppression algorithm, PQ droop control algorithm to add power shock suppression. The scheme has been verified in the 10KW simulation of the ship power system.
Key words: Shore power; PQ droop control
【中图分类号】U223.6【文献标识码】B 文章编号1561-0330(2017)08-0000-00
1 引言
长期以来,靠港船舶采用燃油辅机自行发电,船厂则采用变频发电机组给船舶供电,港口、船厂的高能耗和高污染问题日趋严重。岸电系统的使用,可以给靠港船舶提供更高性能的电力,同时达到节能减排的目的。岸电系统需要满足不同船舶的供电需求,因而其对负载必须具有较强的适用性;而且很多靠港船舶在切换供电系统时不希望供电中断,希望岸电和船电供电系统实现无缝切换。
2 岸电种类及控制方案
2.1 岸电种类
目前世界上已有岸电方法都是港口电网向船舶电网直接供电,主要有三种方式[1]:
(1)低压岸电/低压船舶供电方案;
(2)高压岸电/低压船舶供电方案;
(3)高压岸电/高压船舶供电方案。
2.2 控制方案
为实现供电系统的无缝切换以及负载的平滑转移,需要岸电具备与船电稳定并联运行的能力,并联成功后,根据一定的控制策略将船电负载平滑转移到岸电系统中,根据控制策略的不同,主要分为手动并车模式和全自动并车模式两种。两种控制策略的原理如下:
(1)手动并车模式:首先根据相位指示灯的旋转速度来手动调整船电输出频率,使两者频率接近的同时保持一定的频率差;在此条件下人为判断岸电与船电输出电压的相位关系,判断同相后,手动按下并车开关;并车成功后,手动缓慢调整船电输出频率,直到负载完全转移至岸电,切断船电供电。该方案改造成本低,但操作稍微复杂。
(2)全自动并车模式:岸电或者船电系统通过检测对方的输出电压、输出功率,自动判断两者的频率、相位、功率大小,自动实现并车以及负载转移。该方案改造成本高,但操作很简单。
我们的系统主要面向1MW以下船舶供电,因此采用低压岸电/低压船舶供电方案。为了降低改造成本,我们采用手动并车模式来实现岸电与船电的供电切换。
3 无缝切换岸电控制系统
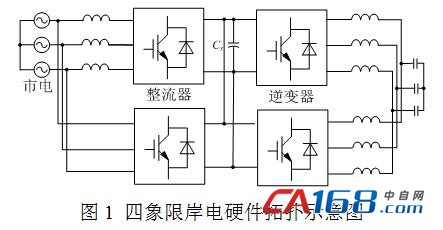
3.1 岸电硬件拓扑
3.2 岸电控制技术
3.2.1 SPWM控制技术
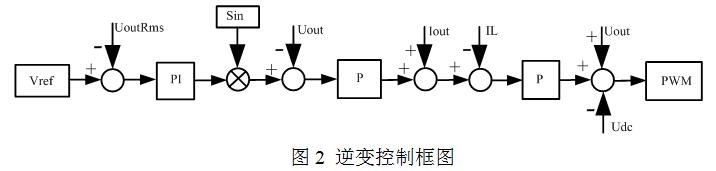
逆变控制部分采用SPWM控制技术[2],三相分别独立控制,使系统具备带不均衡负载的能力。逆变的控制框图如图2,其中UoutRms是输出电压有效值,Vref为输出电压有效值基准,Uout为输出电压瞬时值,Iout为负载电流瞬时值,IL为电感电流瞬时值,Udc为输出电压直流分量,Sin为输出电压正弦基准信号,其中Sin频率根据负载有功大小变化,Vref根据负载无功大小变化[3]。
任何硬件电路存在一定的不一致性以及在数字控制离散化过程中难免引入直流分量,因此逆变输出电压中一定会有直流分量的存在,严重情况下甚至会导致系统震荡,因此控制环路中加入输出直流分量抑制算法,提高了逆变输出电压质量。
逆变电压的动态响应是个很重要的指标,动态响应太差将影响供电效果,严重时甚至会损坏用电设备,因此控制环路中加入负载电流前馈,能大幅提高系统的动态响应能力。逆变控制框图如图2所示。
3.2.2 PQ下垂控制
船用发电机一般具有自下垂特性[4],岸电并车系统中,为保证岸电和船电的稳定并联运行以及负载的转移,需要在岸电控制算法中引入PQ下垂控制,使岸电具备跟随负载有功无功自动调整输出电压频率和幅值的功能。
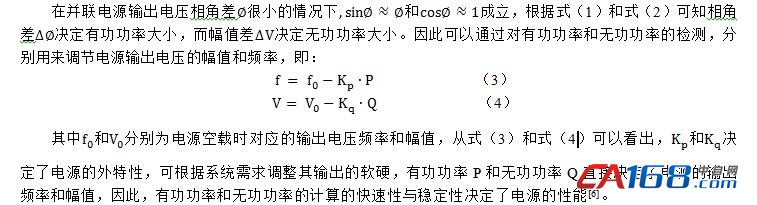
两个交流电源并联运行时的等效电路如图3所示。图3中忽略了两个电源输出阻抗中的阻性部分,可得出电源1输出的有功功率和无功功率表达式[5]为:
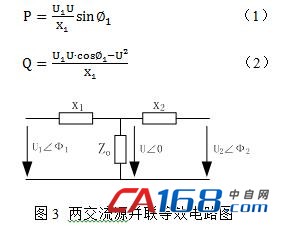
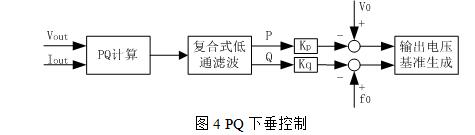
虽然系统控制算法为SPWM控制,三相独立控制,但为了提高有功功率和无功无功功率的计算速度,输出瞬时功率计算在DQ旋转坐标轴下实现,D轴分量表示有功,Q轴分量表示无功,据此计算出的功率,由于高次谐波的存在,导致瞬时功率的波动,同时由于负载不均衡的存在,造成DQ轴的低频波动,本文采用复合式低通滤波方案,在保证滤除高次谐波的情况下,同时滤除固定的低频谐波,在此滤波方案下,有功功率和无功功率的动态响应影响很小。
基于复合式低通滤波的PQ下垂控制框图如图4所示。
3.2.3 负载平滑转移过程实现
在该并车过程中,岸电下垂特性曲线固定,通过调节船电下垂特性曲线来实现负载平滑转移。图5是岸电与船电并车过程中不同时刻对应的下垂特性曲线,其中S0表示岸电下垂特性曲线,S1、S2、S3、S4分别为不同时刻船电对应下垂特性曲线,随着船电下垂特性曲线的不断下移,完成其负载往岸电的平滑转移。
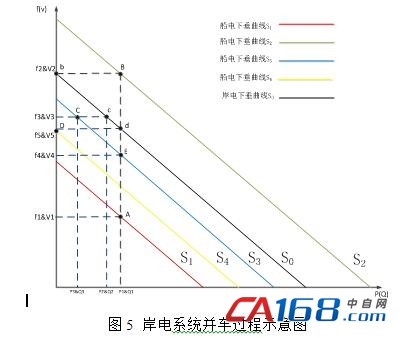
岸电和船电并车过程如下:
(1)当船舶靠港后,船用发电机继续工作维持船上用电需求,其输出特性对应其下垂曲线S1上的A(P1&Q1,f1&V1)。此时岸电电源空载运行,输出特性对应其下垂曲线S0上的b(0,f2&V2)。
(2)船上操作人员通过双频双幅表观察岸电与船电电压及频率。要求并车前两个电源电压幅值尽量一致,岸电输出频率要稍高于船电。此时需要调整船电输出电压和频率,即将船电下垂特性曲线S1整体上移,直到其工作点由A点调整到B(P1&Q1,f2&V2),对应新的下垂特性曲线S2,接近岸电空载工作点,但频率稍微低于岸电频率。完成该调整后,系统具备了并车条件。
(3)船上操作人员确认完上面条件后,观察同期表,当两套电源相位角差异小于30度时,手动合闸,使得岸电并上船电系统。并车成功后,岸电和船电根据各自的下垂特性,达到动态平衡,此时船电依然工作在B点附近,岸电工作在b点附近。
(4)并车后,通过降低船电工作频率,即下垂特性曲线由S2下移到S3,此时因为船电工作频率低于岸电工作频率,负载将往岸电转移,在下垂特性下,船电工作点将从E(P1&Q1,f4&V4)过渡到工作点C(P3&Q3,f3&V3),同时岸电将从工作点b(0,f2&V2)过渡到工作点c(P2&Q2,f3&V3),此时将有功功率P2转移到了岸电系统中。
(5)继续降低船电工作频率,即下垂特性曲线由S3下移到S4,系统将和(4)一样完成功率的平滑转移,最终船电系统工作于D(0,f5&V5),接近空载状态,岸电系统工作于d(P1&Q1,f5&V5)。此时两个电源输出频率及电压趋向一致,船电负荷全部转移到岸电上,船电从系统中切出,整个并车过程结束。
4 实验结果与分析
4.1 实验平台简介
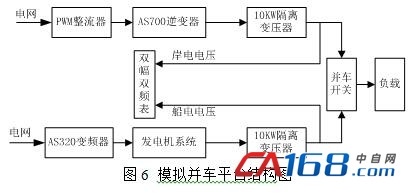
为了验证控制算法的有效性,以10kW发电机作为模拟船电系统,该发电机具有实际船电系统的下垂特性,采用公司AS320变频器驱动发电机;岸电以AS700为硬件平台,满足能量的四象限流动,因此对并车时刻的相位超前与滞后的要求不高;通过双幅双频表来检测岸电和模拟船电的输出电压幅值和频率,以此判断合理的并车条件。图6为该平台的拓扑结构图。
4.2 实验测试
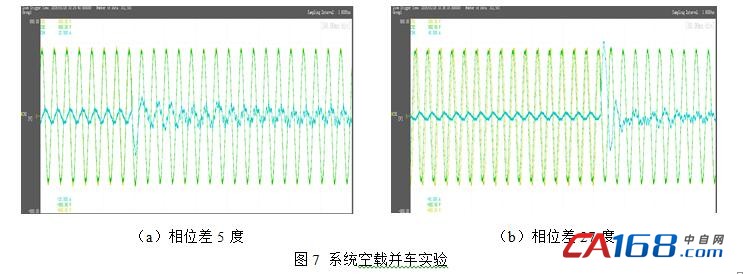
(1)空载并车实验
首先通过调节模拟船电输出频率及幅值,使其在空载工况下比岸电的频率低0.5Hz,电压幅值差在10V以内。图7为系统空载并车实验波形,图中黄色和绿色分别为船电和岸电对应相电压波形,蓝色为船电输出电流。其中图7(a)图并车时刻相位差5度,此时并车冲击电流较小。图7(b)图并车时刻相位差27度,此时冲击电流很大,但系统能在一个周期内达到稳定状态,说明系统具备良好的动态响应能力。
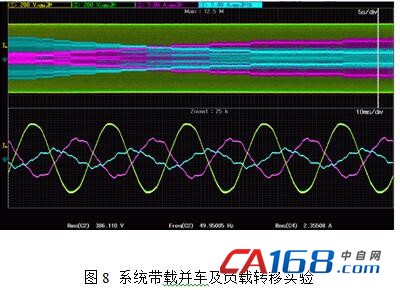
(2)带载并车以及负载转移实验
首先船电带载运行,通过调节船电频率,使其在带载工况下输出频率比岸电低0.5Hz,幅值差在10V以内。图8为带载并车以及负载转移波形,图8中黄色和绿色分别为船电和岸电对应相电压波形,蓝色为船电输出电流,粉色为岸电输出电流。由图中可以看出,通过逐渐降低船电频率,船电输出电流逐渐减小,岸电输出电流逐渐增大,在整个转移过程中并车端电压很稳定,说明系统能稳定平滑的转移系统能量。
5 结束语
本文论述了一种改进型PQ下垂控制在四象限岸电系统中的应用,其通过对有功功率和无功功率计算的优化,实现了动态响应和稳定性兼顾的要求;通过下垂控制的应用,实现了岸电与船电并车过程中负载平滑过渡的功能,实现了船电负载的不间断供电。
参考文献
[1]孙永涛.靠港船舶供岸电电源技术及自动并车系统研究[C].武汉:武汉理工大学,2012.
[2]张晶. UPS逆变器数字控制技术的研究[C].哈尔滨:哈尔滨工业大学,2011.
[3]沈坤,章兢,王坚. 基于PQ下垂控制逆变器并联技术的列车辅助供电系统研究[J].电工技术学报,2011,(26):223-228.
[4]肖涛,徐致新,徐正喜.舰船主发电机并联运行控制器自动并车功能实现[J].船电技术,2002,(6):15-18.
[5]杨淑英,张兴,张崇巍.基于下垂特性的逆变器并联技术研究[J].电工电能新技术,2006,(25):7-10.
[6]韦统振.电力电子变换器外特性下垂并联控制方法[C].北京:中国科学院电工研究所,2004.
作者简介
王亮平 (1982-) 男 硕士研究生 研究方向为大功率逆变技术






共0条 [查看全部] 网友评论