



Abstract: In order to achieve sensorless control of permanent magnet synchronous motor(PMSM) in full speed range, a full-order sliding mode observer based on the extended back electromotive force model was used for rotor position and speed estimation, in order to solve the problem that this estimation algorithm can not be used for control because of the accuracy of the observer is low in the zero and low speed range, I/F open-loop start-up strategy was used, and a smooth switching method according to decreasing q-axis reference current was also used to achieve the smooth switching from I/F open-loop control to double closed-loop vector control based on estimated speed. The simulation results indicate feasibility and effectiveness of the control strategy adopted.
Key words: Permanent magnet synchronous motor; Sensorless control; I/F open-loop start-up strategy; Extended back electromotive force
【中图分类号】TP273【文献标识码】A文章编号1561-0330(2017)08-0000-00
1 引言
永磁同步电机(PMSM)由于其功率密度高、动态响应快等优点,在电气传动领域中得到了广泛的应用。永磁同步电机的矢量控制系统需要准确的电机转子位置信息和速度信息,因此很多永磁同步电机控制系统中会在电机上安装机械传感器以获取准确的转子位置信息,但是机械传感器的存在会增加系统的成本并且安装复杂,在很多应用场合中无法安装位置传感器,因此近年来国内外许多学者针对永磁同步电机无位置传感器控制进行了深入的研究,针对不用的应用场合提出了许多无位置传感器控制算法,如应用于低速场合的高频信号注入法[1],应用于高速场合滑模观测器法[2-3]、自适应观测器法[4-5]和扩展卡尔曼滤波法[6]等,每一种估算算法各有其适用的应用场合,目前还没有一种位置估算算法能够应用于永磁同步电机的全速度范围。
目前工业应用中使用较多的方法是通过获取电机的反电动势来获取转子位置信息,其中滑模观测器法由于其算法简单易行得到了广泛的应用。但是在零速及低速情况下,由于电机反电动势过小导致估算精度很低,因此此种方法不适用于电机的零速与低速工况,也不能用于电机的启动。针对该类无位置传感器控制算法的缺陷,有学者提出了先开环启动将电机提升至速度估算精度足够准确的转速再切入估算速度闭环控制[7-9]。
2 基于扩展反电动势的转子位置估算算法
永磁同步电机基于同步旋转d-q坐标系下定子电压方程为:



3 永磁同步电机全速度范围控制策略
3.1 开环I/F启动策略
在零速及低速区域,由于观测器的精度不够导致转子的速度和位置信息估算偏差过大,因此需要先将电机转速提升至观测器精度足够的水平之后再切换至估算速度闭环。
I/F启动的基本思想是在电枢绕组中给出一个旋转的电流矢量,通过该电流矢量在力矩轴的投影分量产生电磁转矩拖动电机运行直至电机转子位置与电流矢量之间保持一个相对静止的稳定运行状态。
在I/F启动初始时刻,需要对转子进行预定位,通过在电机施加一个直流电流矢量使电机转子被拖到指定的位置进行启动。本文中将初始位置设定为A轴,因此需要先通入一个沿A轴方向的直流电流矢量使电机转子与A轴对齐。
假设由指令位置角度确定的旋转坐标系的横、纵坐标分别为d*、q*。为了使电机尽早进入加速状态,设定d*-q*坐标系的初始位置滞后于电机d-q坐标系初始位置90°。如图3(a)所示。

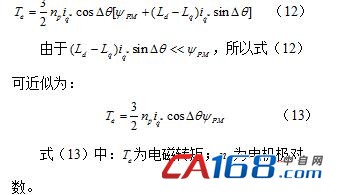
加速过程中给定电流矢量随着给定位置角的变化开始缓慢加速旋转,这样就会使得给定d*-q*坐标系与电机实际d-q坐标系会产生相位差,如图3(b)所示。因为相位差导致给定电流在实际电机力矩轴上会产生一个电流分量,这个电流分量会产生力矩,当产生的力矩大于负载转矩时,电机开始旋转,转矩表达式为:
3.2 状态切换过程
当转子转速升高到一定的程度之后,观测器的精度足够就可以开始切换到基于速度估算模块的双闭环控制,但是由于电机实际的位置角与I/F给定的位置角之间存在角度偏差![]() ,如果直接进行切换,在切换时刻必然导致q轴给定电流与q轴反馈电流的不匹配,造成电机的转速波动与电流突变。
,如果直接进行切换,在切换时刻必然导致q轴给定电流与q轴反馈电流的不匹配,造成电机的转速波动与电流突变。
本文采取一种在切换之前减小q轴给定电流的方式来调节I/F给定角度与电机实际位置角之间的相位差值角![]() ,当减小给定q轴电流时,投影在实际电机q轴的电流也会减小,电机会减速,导致相角差减小,直到给定电流与新的相角差在力矩轴上产生的投影与负载转矩平衡,此时电机重新达到平衡状态,这个调节过程称为电机的自调整过程。当
,当减小给定q轴电流时,投影在实际电机q轴的电流也会减小,电机会减速,导致相角差减小,直到给定电流与新的相角差在力矩轴上产生的投影与负载转矩平衡,此时电机重新达到平衡状态,这个调节过程称为电机的自调整过程。当![]() 较小时,I/F反馈电流基本都投影在了电机实际q轴上,两个电流的幅值十分接近,此时切换便可使得电机转速及电流不产生较大的波动。
较小时,I/F反馈电流基本都投影在了电机实际q轴上,两个电流的幅值十分接近,此时切换便可使得电机转速及电流不产生较大的波动。
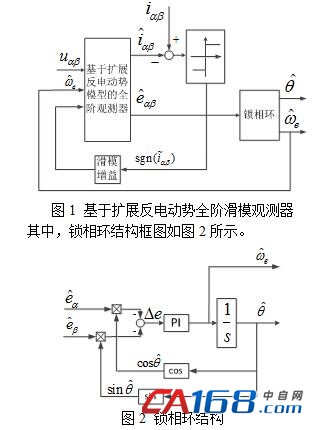
3.3 基于扩展反电动势全阶滑模观测器的双闭环矢量控制
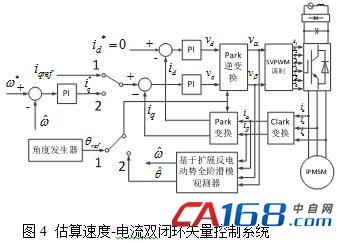
系统整体控制框图如图4所示。整个控制过程包含两个阶段,图中的两个开关用来切换控制方式,开关打到位置1处为开环启动过程,开关打到位置2处为双闭环控制过程。电流环调节器与速度环调节器均采用PI调节器,两种控制过程中,d轴电流给定值均为0。在开环启动过程中,q轴参考电流为一个恒定值,位置指令角度由给定角速度积分得到,电机转速升到一定的程度之后,通过3.2节中的切换过程使差值角较小之后便切换到基于估算速度的双闭环控制过程,在切换时刻将速度调节器输出的初值设定为此时I/F启动过程的q轴参考电流;在双闭环控制过程中,q轴参考电流切换为速度调节器的输出。
4 仿真结果与分析
为了验证本文所提无位置传感器控制方案的有效性,搭建了永磁同步电机无位置传感器控制的MATLAB仿真平台。仿真中的电机参数为:4对极,定子电阻0.5![]() ,定子电感1.5mH,永磁体磁链0.2Wb,转动惯量0.0054kg·m2,额定转速2000rpm。
,定子电感1.5mH,永磁体磁链0.2Wb,转动惯量0.0054kg·m2,额定转速2000rpm。
图5、图6、图7分别为带载5N·m运行的I/F启动转速波形,I/F启动q轴反馈电流波形和I/F启动估算转子位置角与I/F启动给定角度的角度差值波形。系统在4.7s时从I/F开环启动切换到基于估算速度的双闭环矢量控制。
从图6、图7中可以看出,不断减小给定电流幅值可以逐渐缩小角度差值,当角度较小时进行切换,转速波动与电流反馈波动均很小,转速切换较为平滑,如图5所示。从图5和图7中可以看出,启动过程中转速和相角差值存在波动,且波动逐渐减小最终趋于平稳,这是前文提到的I/F启动过程中电机的自调整过程。
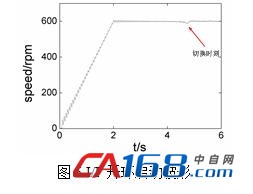
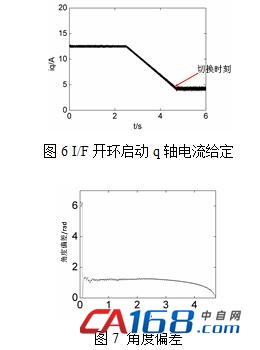
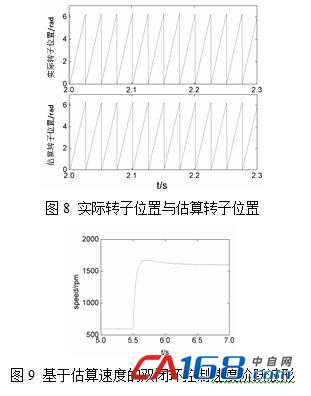
图8为实际电机转子位置和观测器输出的估算转子位置,从图8的观测器输出的估算结果可以看出,基于扩展反电动势的全阶滑模观测器具有良好的转子位置观测性能,观测结果能够满足控制要求。图9所示为基于估算速度的双闭环矢量控制速度阶跃波形,在5.5s时速度给定从600rpm阶跃给定为1600rpm,从图9的仿真结果可以看出控制系统具有良好的动态响应性能,稳态时转速也较为平稳。
5 结论
本文针对永磁同步电机的中高速应用场合,采用了一种基于扩展反电动势全阶滑模观测器算法来进行转子位置和速度估算,针对低速时观测器观测精度较差的问题,采用了I/F开环启动的方法,先将电机转速提升至观测器精度足够的阶段再通过减小给定电流矢量幅值的方法实现速度开环到速度闭环的平滑切换。最终的仿真结果验证了所采用的无位置传感器控制方案的可行性与有效性。
参考文献
[1]Jang J H, Sul S K, Ha J I, et al. Sensorless drive of surface-mounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency[J]. Industry Applications IEEE Transactions on, 2003, 39(4):1031-1039.
[2]Bernardes T, Montagner V F, Gründling H A, et al. Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine[J]. IEEE Transactions on Industrial Electronics, 2014, 61(4):1679-1691.
[3]Kim H, Son J, Lee J. A High-Speed Sliding-Mode Observer for the Sensorless Speed Control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9):4069-4077.
[4]Suwankawin S, Sangwongwanich S. A speed-sensorless IM drive with decoupling control and stability analysis of speed estimation[J]. IEEE Transactions on Industrial Electronics, 2002, 49(2):444-455.
[5]Piippo A, Hinkkanen M, Luomi J. Analysis of an Adaptive Observer for Sensorless Control of Interior Permanent Magnet Synchronous Motors[J]. IEEE Transactions on Industrial Electronics, 2008, 55(2):570-576.
[6]Smidl V, Peroutka Z. Advantages of square-root extended Kalman filter for sensorless control of AC drives[J]. IEEE Transactions on Industrial Electronics, 2012, 59(11): 4189-4196.
[7]Wang Z, Lu K, Blaabjerg F. A Simple Startup Strategy Based on Current Regulation for Back-EMF-Based Sensorless Control of PMSM[J]. IEEE Transactions on Power Electronics, 2012, 27(8):3817-3825.
[8]王萌, 杨家强, 张翔,等. 一种表贴式永磁同步电机电流矢量闭环I/f控制方法[J]. 中国电机工程学报, 2015, 35(10):2513-2521.
[9]王子辉, 叶云岳. 反电势算法的永磁同步电机无位置传感器自启动过程[J]. 电机与控制学报, 2011, 15(10):36-42.
[10]寇宝泉, 程树康. 交流伺服电机及其控制[M]. 机械工业出版社, 2008.
作者简介
刘志宏 (1976-) 男 现就职于武汉第二船舶设计研究所






共0条 [查看全部] 网友评论