
关键词:开关磁阻电机 霍尔位置传感器
Abstract: There are many position sensors used in switched reluctance motor. Featuring simple structure, easy to mount and mechano-electronized, Hall sensors are becoming more and more widely used.This article will give a detailed introduction to construction, operation and design principles of these Hall sensors.
Key words: Switched reluctance motor Hall position sensor
【中图分类号】TM352【文献标识码】B 文章编号1606-5123(2017)08-0000-00
1 引言
位置传感器是组成开关磁阻电动机系统的四大部分之一,其作用是检测转子在运动过程中的位置,将转子的位置信号转化为电信号,为逻辑开关提供正确的换相信息,以控制它们的导通和截止,使电动机电枢绕组中的电流随着转子位置的变化依次换向,形成旋转磁场,驱动转子连续不断地旋转。
位置传感器的种类很多,有电磁式、光电式、磁敏式等。 它们各具特点,然而由于磁敏式霍尔位置传感器具有结构简单、体积小、安装灵活方便、易于机电一体化等优点,目前得到越来越广泛的应用。本文将对霍尔位置传感器的结构原理、构成原则给出技术分析。
2 霍尔传感器
磁敏式传感器是一种以磁场激发的磁敏元器件,它是名目繁多的传感器中重要的一个家族。磁敏传感器的种类很多,有磁阻元件、磁敏二极管、磁敏三极管、磁抗元件、方向性磁电元件、霍尔元件、霍尔集成电路,以及利用这些元器件二次集成的磁电转换组件。 其中以霍尔效应原理构成的霍尔元件、霍尔集成电路、霍尔组件统称为霍尔效应磁敏传感器,简称霍尔传感器。
霍尔传感器按其结构分类,可分为霍尔元件、霍尔集成电路和霍尔功能组件三大类。
霍尔传感器按其功能和应用分类,可分为线性型、开关型、锁定型三种。
2.1 线性型霍尔传感器
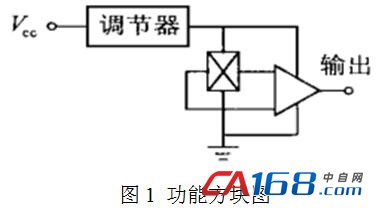
线性型传感器是由电压调整器、霍尔元件、差分放大器、输出级等部分组成,其功能方块图如图1所示。输入为线性变化的磁感应强度,得到与磁感应强度成线性关系的输出电压。可用于磁场测量、非接触测距、黑色金属检测等。
2.2 开关型霍尔传感器
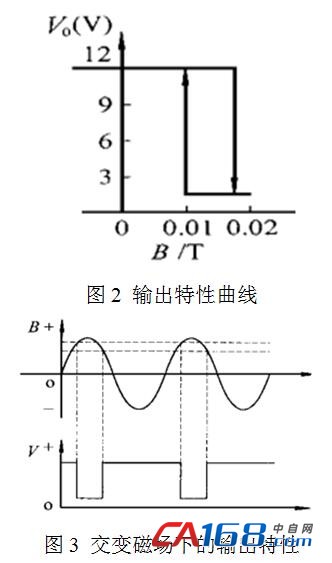
开关型传感器是由电压调整器、霍尔元件、差分放大器、施密特触发器和输出级等部分组成。输入为磁感应强度,输出为数字信号。图2是其输出特性曲线。这种开关的导通和截止过程只和外界磁感应强度的大小有关,而不需要磁场极性的变换。它的磁滞回线相对于零磁场轴是非对称的。图3显示了这种开关电路在交变磁场作用下的输出特性。
2.3 锁定型霍尔传感器
锁定型传感器同样也是由电压调整器、霍尔元件、差分放大器、施密特触发器、输出级等五部分组成。锁定型传感器实质上也是一种开关型器件,与一般霍尔开关的差别在于,它是由双磁极激发的。
3 磁阻电机霍尔位置传感器
3.1 位置传感器的结构
霍尔位置传感器和电动机本体一样,也是由静止部分和运动部分组成,即位置传感器定子和位置传感器转子。其转子与电机主转子一同旋转,以指示电机主转子的位置,既可以直接利用电动机的永磁转子,也可以在转轴其他位置上另外安装永磁转子。定子是由若干个霍尔元件,按一定的间隔,等距离地安装在传感器定子上,以检测电机转子的位置。
3.2 位置传感器的基本功能
位置传感器的基本功能是在电动机的每一个电周期内,产生出所要求的开关状态数。也就是说电动机传感器的永磁转子每转过一对磁极(N、S极)的转角,就要产生出与电机逻辑分配状态相对应的开关状态数,以完成电动机的一个换流全过程。如果转子充磁的极对数越多。则在360° 机械角度内完成该换流全过程的次数也就越多。
3.3 位置传感器的构成原则
要构成一个霍尔位置传感器必须满足以下两个条件:
(1)位置传感器在一个电周期内所产生的开关状态是不重复的,每一个开关状态所占的电角度应相等。
(2)位置传感器在一个电周期内所产生的开关状态数应和电动机的工作状态数相对应。如果位置传感器输出的开关状态能满足以上条件,那么总可以通过一定的逻辑变换将位置传感器的开关状态与电动机的换向状态对应起来,进而完成换向。然而,对于每一种组合的霍尔位置传感器并非都能满足上述要求的。先以一个由相互间隔为60°电角度的三个霍尔元件A、B、C所组成的霍尔位置传感器为例,图4为霍尔元件输出波形组合图。
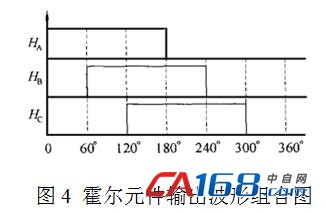
由前面所述的锁定型霍尔开关元件的原理可知,在一个电周期内,即转子的一对磁极转角内,当其感受N及S二个不同极性磁场的作用时,将呈现出“高电平”及“低电平”(或者相反)两个不同的状态,这两个不同的状态所占的电角度相等,各为180°,把三个相互错开60°电角度的波形组合在一起,就可以看出究竟能产生多少开关状态。
4 电机位置传感器的设计
霍尔位置传感器的设计可分为定子设计和转子设计。定子设计主要是确定霍尔元件的数目、它们之间相互间隔的位置角度以及安装的位置。转子设计主要是确定充磁的极对数。
4.1 定子设计
(1)霍尔元件数目的确定:开关型霍尔传感器是一个双值元件。一个双值元件仅有“0”和“1”两种状态,两个双值元件便有四个状态,而n个双值元件则可组成2n个状态。按照这样的规律,我们可以根据电动机的分配状态数确定所需霍尔元件的最少个数。例如二相导通三相六状态的电机,在一个电周期内需要六个不同的状态,二个霍尔元件产生不了六
个状态,因而所对应需要的霍尔
元件数起码是三个。
(2)霍尔元件相隔的位置角:首先把每个霍尔元件所产生的波形等分成电动机所需要的逻辑分配状态数,然后把它们相互错开一定的位置角后组合在一起,倘若最终能产生所要求的开关状态数,则这个位置角就是可取的。如果分配状态是单数的话,可以把该数乘以2,再按乘2后的数进行等分。
4.2 转子设计
霍尔位置传感器的转子可以直接利用电动机的主转子,也可以和主转子分体安装。如果分体安装,那么其充磁的极对数一般设计成和电动机的主转子一样,以确保换向节拍和主转子磁极处在换向位置的时间是同步的。这样可提高平均转矩,同时降低转矩的波动值。
5 结束语
霍尔传感器是名目繁多的传感器中重要的一个家族,因其具有稳定、可靠,频率响应宽、体积小,结构牢固,易于安装等优点,目前已越来越多地被用于开关磁阻电动机中。霍尔位置传感器的设计可以采用波形组合法,其构成的方案并非是唯一的,但是只要能满足上述条件,就可以作为开关磁阻电动机的位置传感器。
参考文献
[1] 吴建华.开关磁阻电机设计与应用:北京:机械工业出版社,2000,6
[2] 蔡耀成.无刷直流电机中的霍尔传感器.微特电机,1999,5
[3] 谭建成.永磁无刷直流电机技术:北京:机械工业出版社,2011,3
[4] 李发海.电机学.北京:北京科学出版社,2001,7
作者简介
刘超(1992-) 男 研究生 研究方向:控制理论与控制工程方向




共0条 [查看全部] 网友评论