


1 引言
目前国内外机器人发展迅速,各类机器人产品正大量的应用于工业生产中,作为机器人最为关键的几个技术指标的位姿、距离和轨迹的准确度和重复性。而这几项性能指标又以位姿的准确度和重复性为重,机器人的位姿准确度性能的好坏将直接影响到距离和位姿的准确度和重复性。鉴于以上情况及公司发展机器人产业的需求,特提出研发机器人位姿准确度和定位重复性测试设备。
目前国内外机器人性能测试设备以激光跟踪仪为主流测试设备,亦有用到拉线式空间位姿测量方法进行测试。激光跟踪仪测试示意参见图1所示。

图1 激光跟踪仪测试示意图
2 机器人测试项目
依照国家标准对工业机器人性能规范及其试验方法以及国际标准所规定和定义的工业机器人重要的性能指标,具体测试项目参见表1所示。
表1 工业机器人测试项目表
|
序号 |
检测项目 |
循环次数 |
备注 |
|
1 |
位姿准确度和位置重复性 |
30 |
|
|
2 |
多方向位姿准确度变动 |
30 |
|
3 测试系统
3.1 测试原理设计
采用五个方向的接触式传感器对进入测试区域的标准测试球进行接触测试,计算出标准测试球的球心坐标,通过多次测试的坐标位置变化计算出被测机器人的重复定位精度。具体如图2测量示意图。
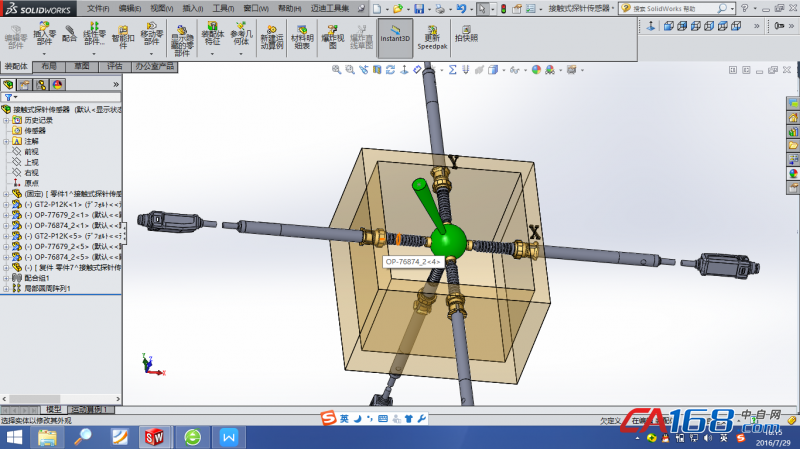
图2 测量示意图
3.2 测试结构实现
结构设计选用五只接触式笔形传感器安装在五个相互正交的面上,五只传感器轴线相交于一点。被测标准钢球由机器人携带在传感器轴线交点处进入,因机器多次的重复进入定位点有差异,通过传感器的输出可测得球心的位置变化,分别参见图3、图4、图5所示。


图5 整体测试图
(1)将标准测试球安装到机器人末端进行点位示教,将测试点落在测试设备的五个传感器的测试区域内。
(2)任意设置机器人非测试点位作为机器人测试时得运动点。
(3)首次将测试球升入测试设备中,设备传感器分别取出当前变形量,软件自动将各轴当前的变形量作为设备初始测量球的心点位置进行传感器清零。
(4)后续测试数据均为与首次测试点之间的相对差值,得出每次测试球的心点变化量。
3.2 硬件选型
传感器选用基恩士高精度接触式数字传感器,参见表2所示。
表2 基恩士传感器选型
|
配置 |
传感器测头 |
感测头 连接电缆 |
放大器模块 |
通讯模块 |
电脑或PLC |
|
数量 |
5 |
5 |
1 |
1 |
|
3.3 串口通信设计
通过串口通信写入设置至传感器放大器,并通过PLC发送指令值DL-RS1A进行对比值,DL-RS1A以ASCII编码发送和接收数据,也可通过串行通信,从PLC发送一个指令至DL-RS1A,并且DL-RS1A自动返回一个响应。如图2为串口通信工作示意图。
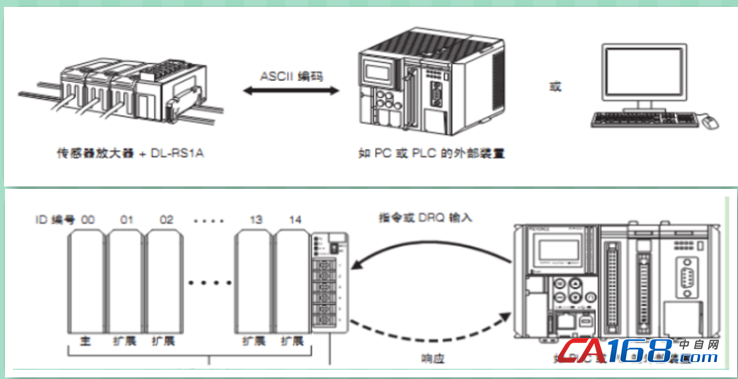
图2 串口通信工作示意图
5 结束语
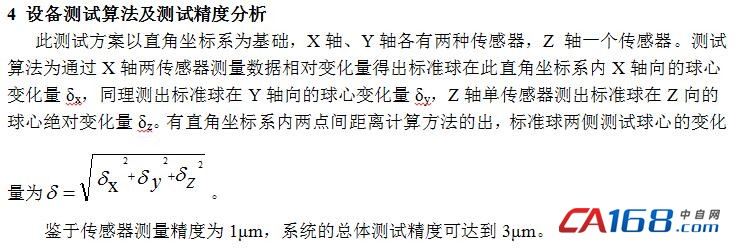
测试结果及实际使用表明,通过采用探头法对工业机器人的位姿准确度、位姿重复性进行测量,满足对机器人类产品的测试需求。该设备具有测试方便、适用范围广、测试精度较高,经济实用等特点,为验证机器人的性能提供了可靠的手段,有一定的推广价值。
参考文献
[1] 陈博.机器人技术的发展趋势与最新发展[J].西安教育学院学报,2004,19(3):85-87.
[2] 宗光华,张慧慧译.机器人设计与控制.北京:科学出版社,2004.
[3] 周伯英.工业机器人设计.北京:机械工业出版社,1995.
[4] 马香峰.机器人机构学.北京:机械工业出版社,1991.
[5] GB/T 12642-2013,工业机器人. 性能规范及其试验方法[S].北京:中国标准出版社,2013.
[6] GB/T 20868-2007,工业机器人.性能试验实施规范[S].北京:中国标准出版社,2007.
[7] N.Nilsson.An application of artificial intelligences,Journal of UCAI,1969,2(3):23-26.
[8] Giralt Getal.Amulti-level planning and navigation system for a mobile robot:A first approach to HALRE.In:Proc 6th int Joint Conf. Artificial Intelligengt,Tokyo,Japan,1979:335-337.
作者简介
李霞 (1982-) 女 工学硕士 工程师 研究方向:工业机器人工程




共0条 [查看全部] 网友评论