


1 引言
国际上对机器人的研究开始于60年代后期的斯坦福研究院,在1972年制造出了第一台具有自主移动能力的机器人。到70年代末期,国际上对移动机器人的研究达到了高潮,到了80年代中后期,机器人的设计和制造开始席卷全球。日木的本田和索尼、美国的通用等一批世界著名公司开始致力于研制移动机器人的运动平台,当时所研究的移动机器人运动平台大多是作为实验室或研究院校的机器人实验平台,以此来促进移动机器人研究方向多方面发展。随着机器人技术的不断发展,以及在军事、工业领域中的应用与日俱增,关于机器人的理论研究、设计制造和应用的新型机器人学也逐步形成,并越来越受到关注。对于移动机器人的研究也将进入了一个新的阶段[1]。
移动式机器人可通过自身的传感器感知外界的环境和显现自身的状态,当遇到障碍物时能够面向运动目标进行自主的运动,完成机器人系统的某些特殊功能。目前所研究的最理想的移动机器人具有较高的智能水平,不需人为因素的干预,可以在各种负责的外界环境中自主完成程序中设定的任务,但目前国际上对移动式机器人的研究大多都处于实验的阶段,市场上比较实用的机器人大多都是半自主移动式的,需要通过外界的干预,并在特定的环境中去执行设定任务。现在市面上的遥控机器人更是离不开人的控制[2]。
新式智能控制算法出现,可使移动机器人向着智能化的方向发展,因此对运动控制系统提出了更高的要求。通过对智能机器人的研究,熟悉其软件和硬件的开发原理,掌握其运动控制的特性,设计出智能的机器人控制系统,为我国移动机器人的后续功能扩展建立一个稳定、可行的平台,而此平台还可作为其它种类机器人的公共基础开发平台。对实现智能机器人的控制系统开发具有十分重要的意义,并为后期机器人的开发奠定了基础[1]。
2 机器人控制系统结构功能
2.1 移动式机器人的控制系统
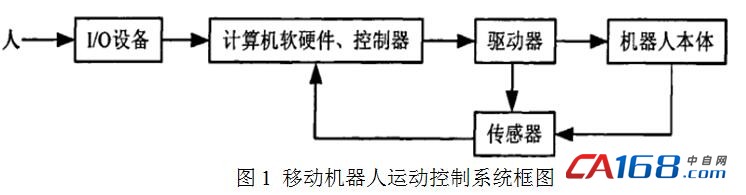
移动式机器人的控制系统的作用是生成控制信息,控制机器人的执行机构进行运动。跟踪设定轨迹是设计移动机器人的一项重要任务,其工作过程根据设定好的路线转为运动控制信号传输给机器人,移动机器人根据控制器信号完成相应的动作,最终达到设定的目标位置。在机器人的运动控制过程中需输入给机器人的信息包含伺服电机编码器转换出来的机器人移动位置和速度的信息,超声波传感器检测出来的障碍物位置的信息,以及单目视觉摄像机、全景摄像机所采集到的视频信息[4]。
2.2 移动式机器人的驱动机构
移动式机器人底座上装有四个伺服电机,以此作为机器人的运动执行机构。每个电机都装有一个编码器,通过采集编码器A和B相的正交编码脉冲信号,可以实现电机的闭环调速和完成机器人的定位。移动式机器人身上安装的中央处理器则主要用于负责传感器模块的控制和管理、定位信息的采集,以及与PC机的通信等,本文所设计控制系统采用了嵌入式大容量单片机控制器。
2.3 移动式机器人的信息处理
输入信息包含视觉信号和距离测量。视觉信号由单目视觉摄像机和全景视觉摄像机提供。距离测量由超声波和激光测距完成。机器人程序开发人员应事先根据运行环境建立良好的运行环境地图,在机器人的移动过程中实时读取位置信息,在中央控制器中根据程序设计的控制算法进行运算,将输出信号发生给伺服电机控制器到驱动电机,从而控制移动机器人的移动。
机器人以中央处理器和上位机作为神经中枢,接收来自超声波和激光模块检测的障碍物信息,单目和全景摄像机提供视觉信息。根据上位机设定的参数和一些其他功能,通过控制器处理输出给电机控制机器人执行机构完成相应动作。
3 控制系统硬件设计
移动式机器人的运动控制系统硬件设计主要包括三部分:主控板设计、驱动机构设计和传感器单元。
3.1主控板设计
主控板的主要作用是完成控制器与模块接口之间的数据管理、传输和控制功能。因移动式机器人上不同种类的传感器模块接口可能不相同,如:双目摄像机为RS232接口;全景视觉摄像机为USB接口。主控板可完成与PC机的通信,驱动机构的的控制信号由上位机经主控板发送给电机控制器。主控板可采集电机编码器的正交编码脉冲信号经过处理作为作位置信号。主控板也对距离测量模块接口进行管理,传感器接收信号的采集处理和发射信号的产生以及超声波传感器运行时间的设置都是由主控板来完成的。
3.2驱动机构
移动式机器人采用四轮运动模式,四个轮分别由通过电机驱动。每个电机都是由各自的电机控制器单独进行驱动,保证了电机闭环调速的独立性、实时性、稳定性和准确性。每个电机单元模块都由控制器和电机组成。电机控制器模块的控制芯片接收上位机的控制指令,经处理器计算后将运行速度和方向输出给执行电机,控制器能够输出控制电机电压,同时通过编码器实时检测电机的运行速度,对电机测量速度和设定速度差值进行比较运算,输出电机的控制电压,从而完成电机的闭环调速。
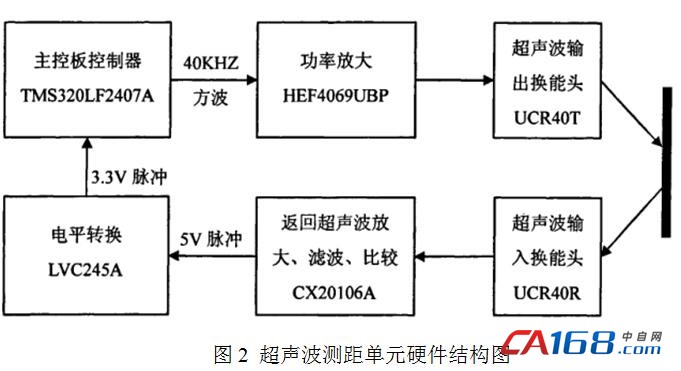
3.3传感器单元
4 仿真模型
本文利用MATLAB/ SimMechanics仿真平台对移动式机器人的运动控制进行仿真研究,构造了基于仿真平台SimMechanics 的运动学仿真模型和基于MATLAB函数的运动学仿真模型。并设计了一个智能小车仿真平台来模仿移动式机器人,本文根据控制系统的性能参数要求确定了PID控制器的各项参数,并且采用传感器技术实时了智能小车在运行过程中的实时状态[5-6]。
5 控制器参数优化
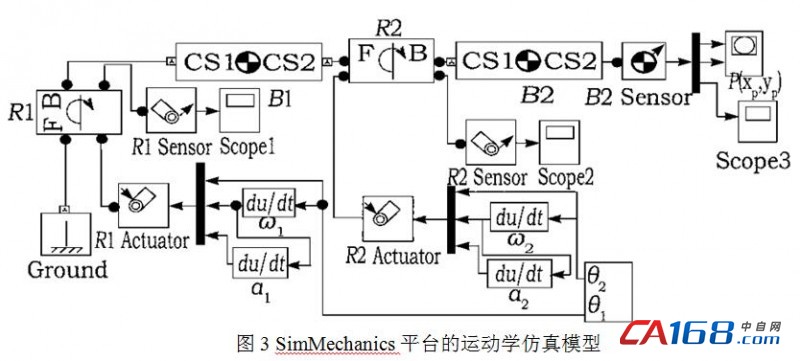
因普通的PID控制器性能的好坏实际上能取决于比例,积分和微分参数的整定,若设定的参数越符合该控制系统,则控制效果就越好,否则相反。本文设计的仿真控制系统通过调整比例、积分和微分三项控制参数,使小车能够更加快速、准确的沿设定路径前进到达目的地。图3中基于 SimMechanics 平台建立的小车运动学仿真模型,本模型中具有图形界面的控制器优化设计功能和仿真的功能,可根据上位机设定的参数对电机控制器中的参数进行优化计算。PID控制器输出的信号经电机控制器后去控制执行电机[7-8]。
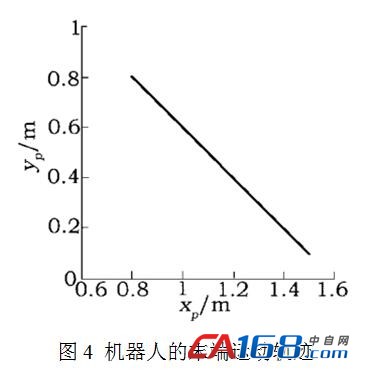
根据所建立的SimMechanics 运动学仿真模型,在仿真软件环境中设置仿真的分析类型,就可以实现移动式机器人的运动学仿真分析。通过安装的编码器可以测得移动机器人的末端轨迹如图 4所示。
6 结束语
本文设计了可独立完成电机的闭环调速的移动机器人控制系统。由上位机直接发送指令给机器人控制器控制运动,无需再参与闭环调速的运算中。使用MATLAB /SimMechanics仿真平台实现了移动式机器人的运动学仿真,通过移动式机器人上的编码器记录的机器人移动的位移,通过控制器将位置信号转换为机器人当前的位置姿态,从而实现对机器人路径的跟踪控制。
参考文献
[1] 章小兵,宋爱国.地面移动机器人研究现状及发展趋势.机器人技术与应用.2005(2):19,23-26.
[2] 刘振山.自主移动机器人运动控制系统的设计与实现.中国海洋大学硕士论文,2004(6).
[3] Gordon T'ma,Howell Mark,Brandao FeUpe.Integrated Control Methodologies for Road Vehicles[J].Vehicle System Dynamics,2003,40(9):157-190P.
[4] 吴琳,梁建宏,半自主侦察机器人的控制体系结构研究.机器人技术与应用.2007(6):34-38.
[5] 罗兵,李华嵩,李敬民等.人工智能原理及应用[M].北京:机械工业出版社,2011.
[6] Alexander M.Meystel,James S.Albus著.冯祖仁,李人厚等译.智能系统——结构、设计与控制.北京:电子工业出版社,2005.
[7] Youjing Cui and shuzhi Sam Ge.Autonomous vehicle Positioning With GPS in UrbanCanyon Environments,IEEE TR ANSACTl0N ON ROBOTICS AND AUTOMATION,VOL.19,NO.1,February 2003:15-25P.
[8]李万臣.模拟电子技术基础设计仿真编程与实践[M].哈尔滨:哈尔滨工程大学出版社,2005:45-72,162-169页.
作者简介
邢依然 (1975-) 女 工学学士 工程师 研究方向:机器人智能控制工程




共0条 [查看全部] 网友评论