



1 引言
机器人研制厂家对机器人的直线轨迹准确度和重复性指标在出厂前是要求必须检测的。目前先进测量设备有很多,国内外机器人性能测试设备以激光跟踪仪为主流测试设备,也有用到拉线式空间位姿测量方法进行测试的,不论用那种进口的检测设备,虽然测试的精度比较高(0.001 毫米测量不确定度),但其测量条件限制较多,操作过程比较繁琐,而且购买价格昂贵,要求操作工必须具备一定的专业技术基础,使用过程中操作程序也比较复杂,后续部件的维修、更换成本也很高。如下图1为采用接触式测试设备检测实物图。
本文所述机器人直线轨迹精度测试设备,不但价格便宜、且便携、操作、维护简便,适合大众机器人厂家使用,便于大面积推广。

2 机器人测试项目
依照国家标准规定的工业机器人性能规范及其试验方法,共包含13项性能指标的测试,具体如下附表所示。其中有对机器人轨迹特性的要求,但是并没有与细化到直线轨迹要求。而对于焊接和涂胶行业应用的工业机器人,其工作轨迹及姿态精度是必须保证的性能,而焊接和涂胶机器人运动轨迹多为直线路径,鉴于此因素,我们提出直线轨迹精度的测试设备的研制。
附表 工业机器人测试项目表
|
序号 |
检测项目 |
循环次数 |
备注 |
|
1 |
位姿准确度和位置重复性 |
30 |
|
|
2 |
多方向位姿准确度变动 |
30 |
|
|
3 |
距离准确度和距离重复性 |
30 |
|
|
4 |
位置稳定时间 |
3 |
|
|
5 |
位置超调量 |
3 |
|
|
6 |
位姿特性漂移 |
连续连续8h |
|
|
7 |
互换性 |
30 |
|
|
8 |
轨迹准确度和轨迹重复性 |
10 |
|
|
9 |
重复定向轨迹准确度 |
10 |
|
|
10 |
拐角偏差 |
3 |
|
|
11 |
轨迹速度特性 |
10 |
|
|
12 |
最小定位时间 |
3 |
|
|
13 |
摆动偏差 |
3 |
|
3 系统测试原理
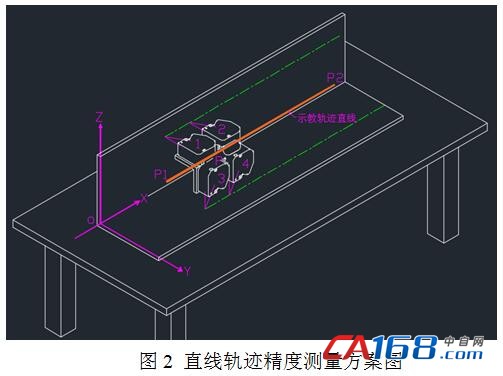
上图2为直线轨迹精度测量方案图,图中的相互垂直的两面由高精度大理石水平尺加工,构成了一个空间坐标系。红色粗实线表示由机器人直线示教点P1和P2示教得来的机器人示教轨迹直线。机器人在沿示教轨迹直线运行过程中安装于末端的1号、2号、3号、4号传感器将以固定频率输出传感器与大理石平尺的相对距离。
相对于同一轨迹点,通过传感器的数据可以确定机器人当前的姿态变化情况:
当1号、2号传感器的测试距离不相等时表明RZ姿态有变化;
当3号、4号传感器的测试距离不相等时表明RY姿态有变化;
当1号、2号与3号、4号传感器的测试距离不相等时表明RX姿态有变化;
相对于不同的轨迹点,通过前后两点同一个传感器的数据可以确定机器人当前的轨迹变化情况:
当1号、2号传感器的测试距离有变化时表明,Y方向轨迹有偏移;
当3号、4号传感器的测试距离有变化时表明,Z方向轨迹有偏移;
通过以上方法即可计算出机器人在直线轨迹的运行过程中的姿态变化和轨迹精度。
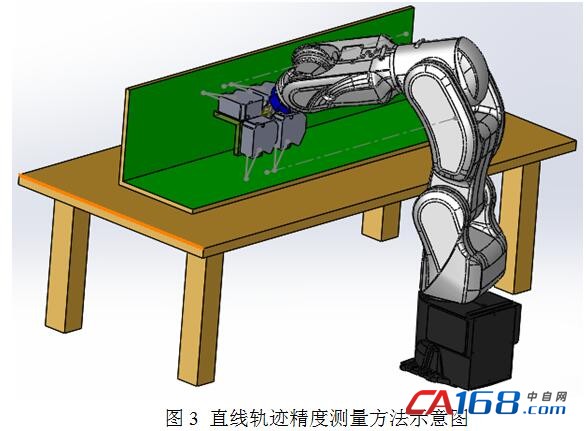
4 操作方法及过程
以高精度的大理石水平尺作为直线轨迹的被测基准,采用四个高精度非接触式激光测距传感器安装到机器人末端,机器人按照直线轨迹指令运行,对进入测试区域的标准大理石水平尺两相邻直边进行测试,通过四个传感器同一时间的显示数据计算出当前机器人末端姿态变化情况,通过直线轨迹上多点的传感器测试数据变化计算出被测机器人的直线轨迹准确度和重复性。测试示意图如下图3所示。
具体操作步骤为:
第一步:根据被测机器人的工作性能将标准大理石水平尺放置到适当位置;
第二步:将传感器安装到机器人末端然后对机器人进行直线轨迹点位示教,将直线轨迹的两个示教点分别落在大理石水平尺的两端。要求两个示教点处四个传感器与水平尺之间的相对距离保持一致;
第三步:任意设置机器人非测试点位作为机器人测试时的运动点;
第四步:控制机器人安照设定的直线轨迹连续进行此条直线轨迹运行,并固定周期记录轨迹上所有传感器的测量数据;
第五步:系统对所测试的多组轨迹数据进行计算,计算出机器人的直线轨迹准确度和重复性;
第六步:对所有测试数据根据国家标准对工业机器人性能规范及其试验方法中轨迹准确度和重复性计算公式计算。
5 结束语
测试结果及实际使用表明,通过采用机器人直线轨迹精度测试设备对工业机器人的直线准确度、位姿重复性进行测量,满足对机器人类产品的测试需求。该设备具有测试方便、适用范围广、测试精度较高,经济实用等特点,为验证机器人的性能提供了可靠的手段,有一定的推广价值。
参考文献
[1]陈博.机器人技术的发展趋势与最新发展[J].西安教育学院学报,2004,19(3):85-87.
[2]宗光华,张慧慧 译.机器人设计与控制[M].北京:科学出版社,2004.
[3]周伯英.工业机器人设计[M].北京:机械工业出版社,1995.
[4]马香峰.机器人机构学[M].北京:机械工业出版社,1991.
[5]GB/T 12642-2013 工业机器人 性能规范及其试验方法[S].北京:中国标准出版社,2013.
[6] GB/T 20868-2007 工业机器人 性能试验实施规范[S].北京:中国标准出版社,2007.
[7] N.Nilsson.An application of artificial intelligences,Journal of UCAI,1969,2(3):23-26.
[8] Giralt Getal.Amulti-level planning and navigation system for a mobile robot:A first approach to HALRE.In:Proc 6th int Joint Conf. Artificial Intelligengt,Tokyo,Japan,1979:335-337.
作者简介
苏渊博 (1984-) 男 硕士学位、工程师 研究方向为工业机器人






共0条 [查看全部] 网友评论