


1 引言
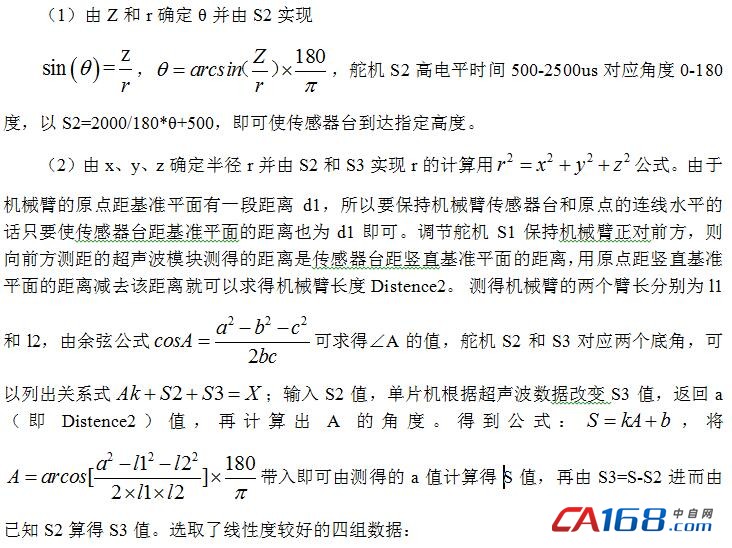
我们正在迎来船舶工业4.0的浪潮,它带给整个造船行业的重大启示是,在设计、生产、管理等诸多领域,将物联网、大数据等新兴信息技术与传统造船生产相融合,将成为解决这一问题的必要手段。船舶工业4.0,是一个现实系统与虚拟系统进行深度融合和交汇的概念。包括船舶行业在内的传统装备制造业要转型升级,实现高度集成化、智能化、自动化的设计、生产及管理,就需要通过信息技术的有效应用,把生产设施、生产现场等现实系统中的实际数据提取出来,在虚拟系统中进行模拟、仿真、优化,再在现实系统中执行。
机械臂正是能够实现这种功用的关键性系统。机械臂是具有模仿人类手臂功能并能完成各种作业的自动控制设备,有多关节连结,能够接受指令并精确地定位到三维空间或者二维空间的点进行作业。机械臂承载能力大、刚性好,可按照接收到的指令进行运动。然而使用者拿到机械臂后会自行完成组装,或根据不同需要进行改装,而各个关节处的电机或者舵机初始角度就会改变;同时在采用机械臂进行精密零部件安装的应用中,希望机械臂能够精确无碰撞地将物体放置指定位姿。因此需要需重新测量生成适应该状态的控制方案。
目前机械臂用于3D打印、激光雕刻等功能,其使用的是空间三维直角坐标系,需将坐标系进行转化。现有的机械臂通常在舵机初始角度已知的条件下,采用极坐标方式对自身及目标姿态进行位置解算、控制。这种方式既消耗计算量,又易造成机械臂与外界碰撞,对产品造成损坏。因此需要对坐标的解算及控制方式进行提高。
2 研究目的
运动学逆解的复杂程度直接与机械臂的结构有很大关系,许多学者对机械臂在空间直角坐标系中的逆运动学研究做出了很大的贡献,在求解机械臂逆运动学的问题中[1-3]。此种方法可以找到全部根,但计算复杂,算式中有大量的变量,在实际工程中需要反复调试才可以使用,而且在实际应用中只采用一组有效根。

3 具体方案
3.1 正运动学分析
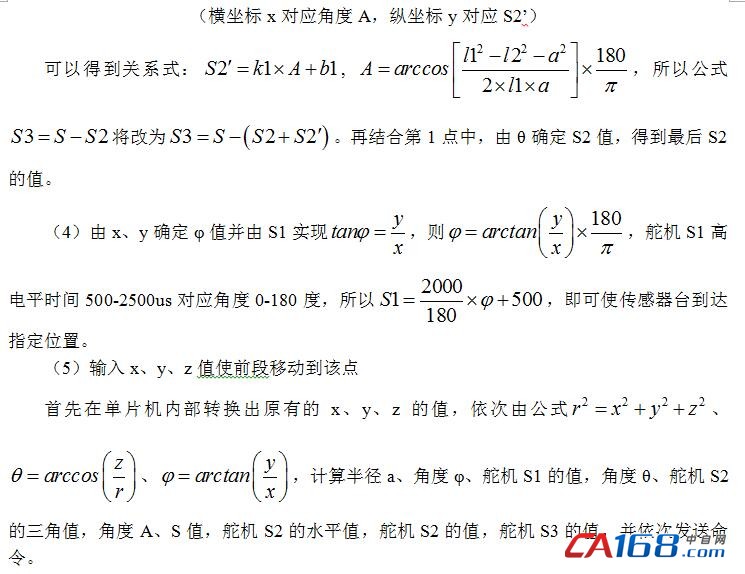
机械臂正运动学求解是已知机械臂各关节角度,求取机械臂末端执行器在空间极坐标系下的期望位姿,基本思想是:在机械臂基点处建立空间极坐标参考系,而后计算给定的机械臂各关节状态,得出由机械臂末端所处参考系的坐标。工业机械臂一般为六轴机械臂,其中关节1控制左右方向,关节2控制前后,关节3控制上下。在空间极坐标系中P(r,θ,φ), r为原点O与点P间的距离可以由S3舵机控制,θ为有向线段OP与z轴正向的夹角可以由S2舵机控制,φ为自x轴按逆时针方向转到OM所转过的角可以由舵机S1控制。因此通过给定的三个舵机参数和大臂小臂长度就可以计算出机械臂末端所在位置。

3.2 逆运动学解算
逆运动学求解是根据机械臂末端执行器的期望位姿,求出与该位形相对应的各关节出角度。
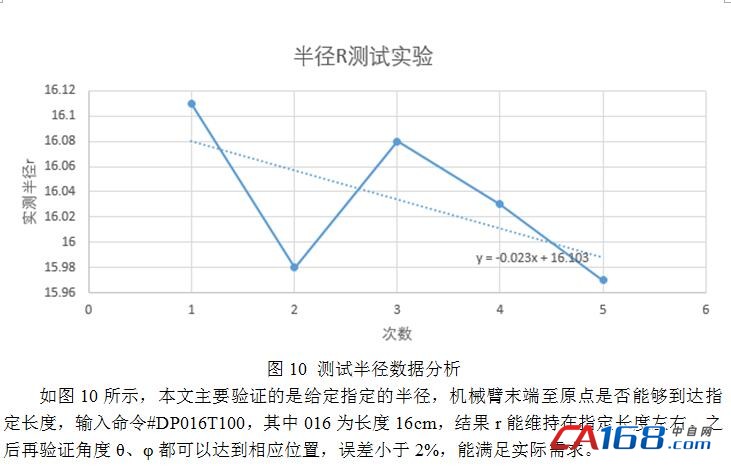
4 试验验证
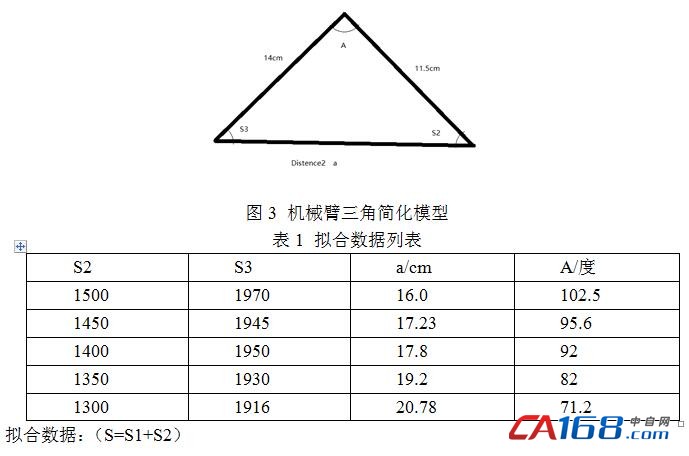
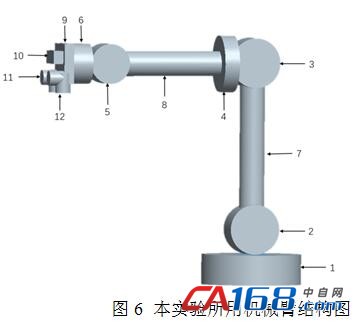
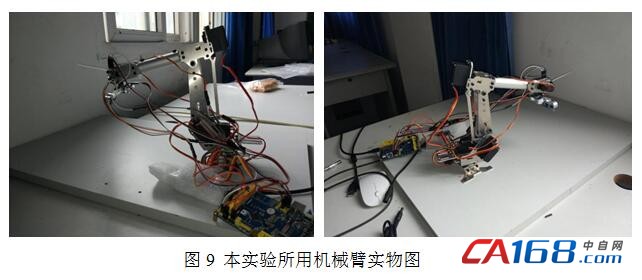
为了将机械臂运动学算法用于手臂实时控制,并返回机械臂末端位置信息,以验证各关节空间组合与末端执行器位姿对应关系的正确性,我们组装了一个主要由机械臂、九轴传感器和两个超声波模块构成的装置,装置包括固定在支撑平面的舵机S1(1)、与舵机S1相邻的舵机S2(2)、与舵机S2相连的机械臂连杆1(3),与机械臂连杆1相连的舵机S3(4)、与舵机S3相邻的舵机S4(5)、与舵机S4相连的机械臂连杆2(6)、与机械臂连杆2相连的舵机S5(7)、与舵机S5相邻的舵机S6(8)、固定在舵机S6前面的传感器台(9)、固定在传感器台前面的九轴传感器(10)、固定在传感器台前面且与九轴传感器垂直的超声波模块1(11)、固定在传感器台下面且与九轴传感器水平的超声波模块2(12)。其机械参数为:大臂14.5cm,小臂11cm。
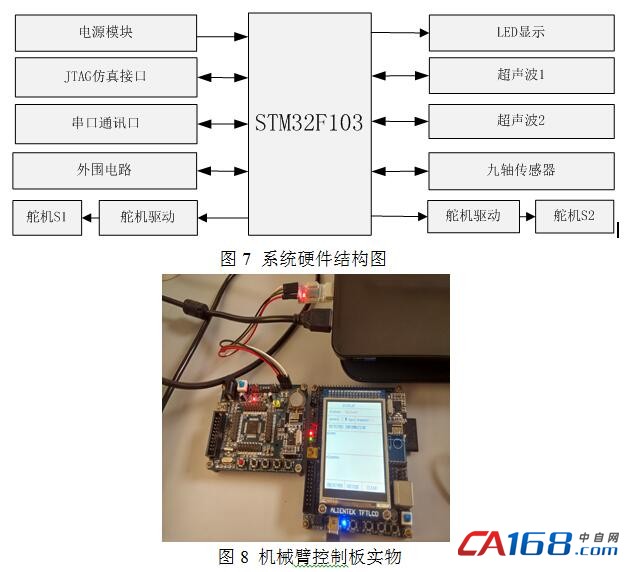
本系统选用意法半导体公司出品的STM32F103ZET6作为系统的微控制器,系统硬件结构如图7所示。主要包括超声波测距模块、电机驱动模块、电源模块、串口通讯模块、C2仿真接口模块及LED显示电路等模块。单片机控制板实物图如图8所示。
5 结论
本文对机械臂在空间极坐标系中的逆运动学分析算法进了系统的阐述。首先阐述了正运动学分析,证实了该种方法的可行性并为逆运动学分析奠定了基础;采用多种传感器及STM32控制系统按照步骤详细介绍了机械臂实物模型实现过程。最后的实验结果表明,该类机械臂及定位算法能够实现快速、精准地定位效果,具有很好的应用前景。
参考文献
[1]李锐,邝展婷.能源高效管理迈向“智慧船厂”的坚实一步[N].中国船舶报,2015-1-30.
[2]李宪华等.模块化六自由度机械臂逆运动学解算与验证[J].农 业 机 械 学 报,2013,4,247-249.
[3]于艳秋,廖启征.基于有理数运算的一般6R机器人位置逆解算法[J].机械工程学报,
2005,41(3):229-233.
[4]刘松国,朱世强,王宣银.基于矩阵分解的一般6R机器人实时高精度逆运动学算[J].机械工程学报,2008,44(11) :304-309.
作者简介
于洋 就读于江苏科技大学电子信息学院 主要研究机械臂的空间定位




共0条 [查看全部] 网友评论