


1 引言
电液伺服加载系统(简称EHSLS)是一中由机-电-液组成的复杂复合力伺服系统,此系统对被用于模拟飞行器舵机在实验室中所受的空气动力等载荷,并且可用于检测舵机的驱动系统技术性能指标的一种地面实物仿真设备[1]。
伺服加载控制器是电液伺服加载系统的重要核心部件之一,其性能参数的好坏对伺服加载系统的性能起决定性作用。对伺服加载控制器首先在计算机上建立模型和调试,然后再在实际的控制系统中进行实际调试。但此方法也会存在很大的风险,一旦伺服控制器出现失控,会及易造成严重的损坏,通过建立合理的与实际工况相符合的加载系统数学模型,对伺服控制器进行离线闭环测试仿真,将控制器的性能参数调整到最佳的状态,可有效避免事故的产生[2,3]。
因电液伺服加载系统具有很大的潜在价值和巨大的经济效益,而受到国内外众多液压及控制领域学者的高度重视,并一度成为此领域的前沿研究课题。对于如何有效的克服加载装置上多余力影响的问题,目前国内外的学者也提出和实验了很多方法[4],其中应用最普遍的主动消扰方式是基于结构的不变性原理多余力抑制,现已应用到了3—4FM型导弹空气动力负载实验仿真台上[5],并取得了十分显著的效果。
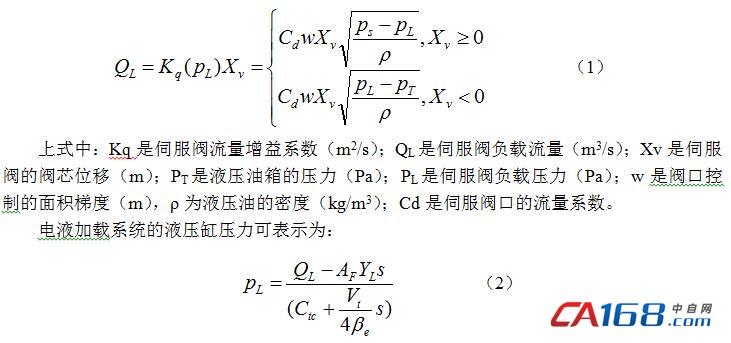
2 电液伺服加载系统数学模型
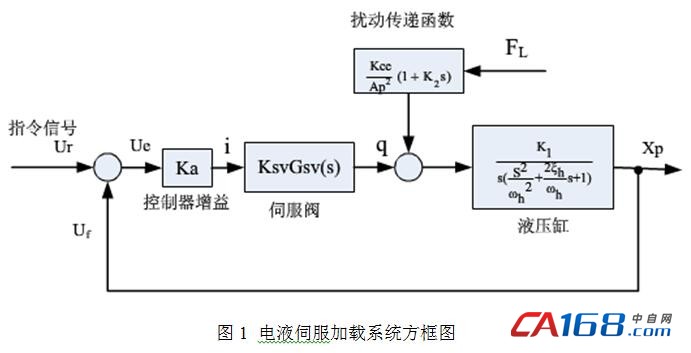
由于电液加载的液压缸与等效的负载可看成刚性的连接,由于力传感器具有较高刚度,可对其产生的弹性变形忽略。由于在实验中需对舵机做精确位移加载,但其内部运动和相互之间的作用力不在本文的研究范围之内,可将舵机系统当成位移的形式作为电液加载控制器的输入,并以此作为基础电液伺服加载系统进行研究。
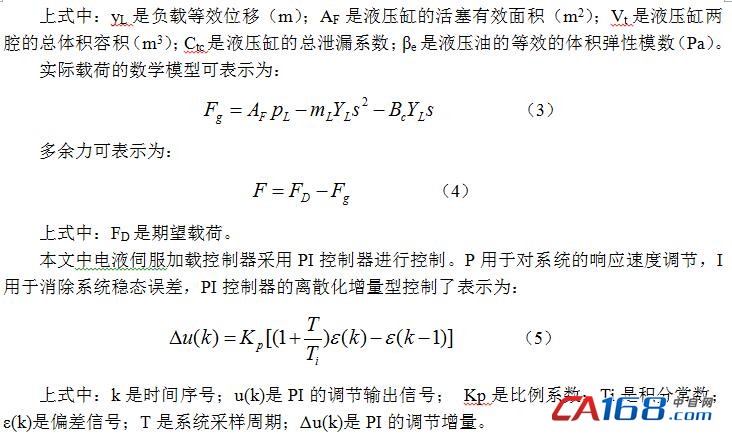

上式中:U是输入电压;i是输出电流; Ka是放大器的增益。
4 仿真模型搭建

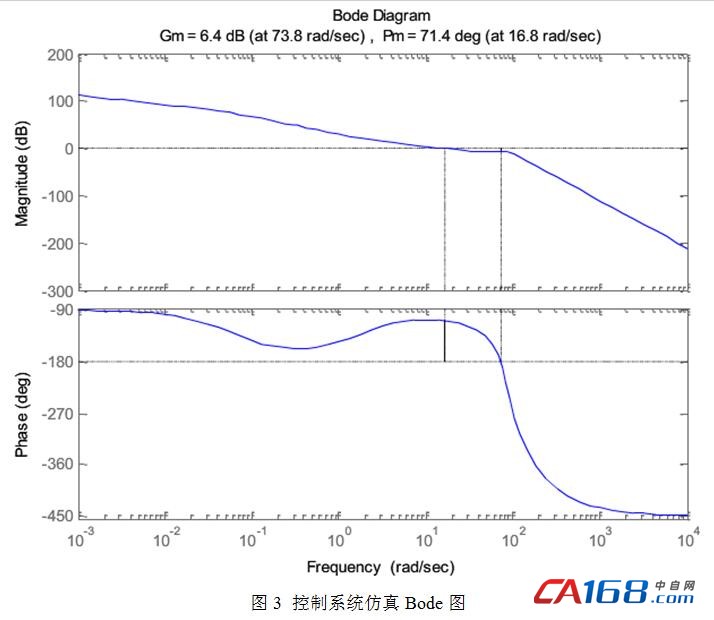
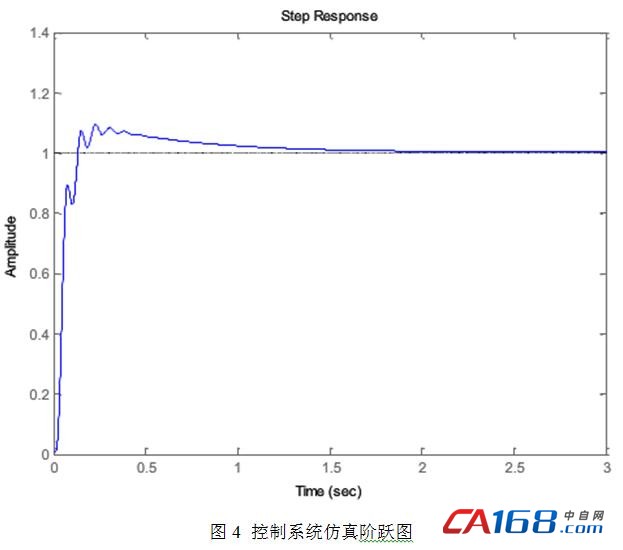
5 结论
本通过对电液加载系统在被动加载时产生的较大多余力和结构不变性难以补偿问题分析,进行了相关部件的模型建立,从而在控制系统设计中,大大的简化了设计流程,在仿真实验过程中可方便的模拟加载器的实际系统,并对相关参数反复调整优化,很快达到最佳的设计要求。
参考文献
[1]鄂昱村,陈楸,李毅.被动式电液伺服加载系统的多余力抑制[J].液压与气动,2014(5),52-55.
[2]蔡源春,周云山,张飞铁等.基于硬件在环仿真技术的无级变速器试验系统研究[J].仪器仪表学报,2009,30(5):960-965.
[3]王永庭,黄英,张付军等.基于硬件在环仿真的变速箱电子控制单元的开发方法[J].兵工学报,2007,28(8),897-902.
[4]高俊霞,华清,焦宗夏.电液加载系统中的多余力及各种补偿方法的比较[J].液压气动与密封,2003,(9).1-6.
[5]苏永清,黄献龙,赵克定.国内电液负载仿真台研究与发展现状[J].机床与液压,1999,(2):17-19.
[6]王新民,刘卫国.直升机加载抑制多余力控制研究[J].机床与液压,2005,(7):142-144.
[7]慕香永,裴润,刘志林,等.用于船舶舵机的电液负载模拟器之控制系统[J].控制理论与应用,2008,25(3):564-573.
[8]宋志安,曹连民,黄靖,等.MATLAB/Simulink与液制系统仿真(第2版)[M].北京:国防工业出版社,2012:88-89,308-313.
作者简介




共0条 [查看全部] 网友评论