


语音播报送餐机器人属于面向餐饮领域的专用服务机器人,是一种能够自主或半自主地为顾客提供服务、改善员工工作强度的智能服务机器人。目前,在欧美等科技发达国家,餐厅服务机器人已经成功应用于餐厅烹饪、迎宾及餐厅服务;近年来,国内餐厅服务机器人的研发也取得了较大的进步,但与国外先进水平相比仍然有很大的差距,主要表现为智能化水平不高,人机交互水平较低等[1-3]。
本文选用北京亚控科技有限公司研发的组态王6.55组态软件作为上位机软件,通过深圳凌承鑫电子有限公司的无线串口模块进行通信,实现对语音播报送餐机器人的远程监控。
2 系统架构
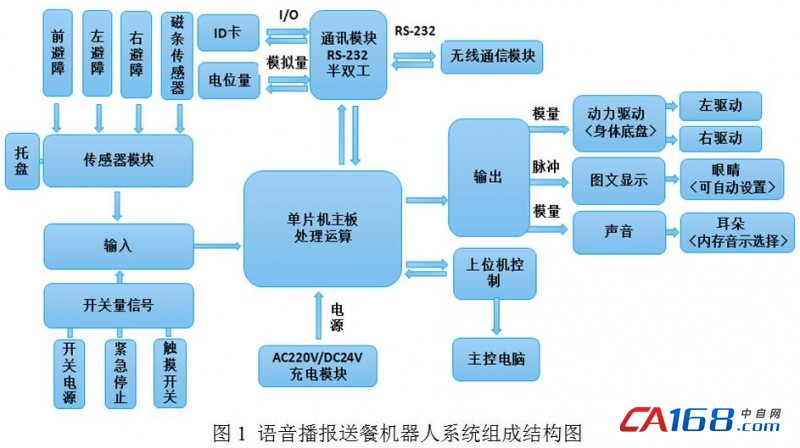
语音播报送餐机器人工作流程如下:(1)由餐厅工作人员将客户点餐放置于餐盘;(2)餐厅工作人员在上位机中输入桌号,点击启动,机器人随即沿着导轨移动至餐桌,同时语音播报提醒顾客取餐;(3)顾客取餐后,触碰机器人手上的轻触开关,机器人即刻返回取餐处等待下一次送餐。系统组成结构如图1所示。
3 上位机监控系统设计
上位机组态监控系统可以让餐厅工作人员方便的监控语音播报送餐机器人的实时运行状态,控制机器人执行送餐指令,实现对送餐机器人的远程监控操作。作为整个语音播报送餐机器人系统的最上层,监控系统是工作人员与机器人之间唯一的接口,其设计的好坏将直接影响整个系统功能的实现。
3.1 登录界面设计
3.1.1用户配置
进入组态王6.55软件工程浏览器界面,在“用户配置”的“用户和安全区配置”中,配置系统管理员、领班、工作人员等用户的用户名、密码和权限。
3.1.2登录按钮制作
在新建画面中,绘制一登录按钮,在按钮“弹起时”动画连接中,输入如下命令语言:

3.2 数据变量定义
进入组态王6.55软件工程浏览器界面,在“数据词典”中,分别定义号牌、餐桌、站点、避障托盘左、避障托盘右、通讯、启动、带站点启动、停止、顺时针转向、逆时针转向、脱磁报警、音乐开关等变量,并根据设计实际,设置变量类型、描述、变化灵敏度、最大值、最小值、最大原始值、最小原始值和初始值等参数。
3.3 通信模块的选用
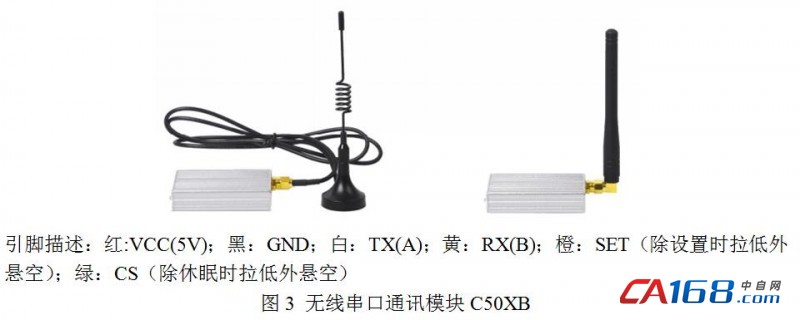
通讯模块选用深圳凌承鑫电子有限公司的无线串口模块C50XB(见图3)进行无线双向透明传输。该模块具有传输距离远(在开阔地可传输2500米的距离(1200bps))、多级发射功率可调(1mw-500mw)、频率宽(413MHZ-453MHZ)、低功耗(接收电流:22mA,最大发射电流350Ma,待机小于5uA)等特点。和单片机的连接电路如图4所示。

3.4 人体红外检测模块
选用迷你型人体红外检测模块[1],主要检测送餐机器人正前方有无人员(障碍物),调整感应距离为0.5m,若前方0.5m检测到人体红外光,则出发模块信号送到单片机主板处理,单片机主板发送指令操控送餐机器人停止前行,并触发语音芯片发出“您好,您挡住路了,请让一下”的语音提示。
3.5 手动操作界面设计
根据餐厅需求实际,设定机器人数量,并对每个机器人进行手动操作设置。本文分别设置了红色机器人、黄色机器人和绿色机器人的手动操作界面。利用工具箱和图库中的工具,设计出手动操作界面,再对每个模块进行变量的动画连接、嵌套小程序编写、设置输入/输出属性等操作。手动操作界面如图5所示。

3.6 机器人调试界面设计
为了设计的灵活性和通用性,针对技术人员,专门设计了一个调试用户,可对机器人的轨迹、停靠点、运行速度、播报语音等内容进行重新设定。部分界面如图6、图7、图8所示。


4 调试结果
将组态开发界面切换到运行系统,用户登录后,选择其中任一机器人,选择手动操作,放置餐盘、设置桌号,点击启动,语音播报送餐机器人即可寻轨行走至餐桌跟前,并语音提示:“3号桌客人您好,您点的餐到了,请取餐”,待客人取走餐后,客人轻触手背上的“BACK”按钮或者工作人员点击上位机上设置的“送餐完成”按钮,机器人即可寻轨返回。
5 结语
本文通过选用北京亚控科技有限公司研发的组态王6.55组态软件作为上位机软件进行组态设计,结合深圳凌承鑫电子有限公司的无线串口模块进行通信,实现了对语音播报送餐机器人的远程监控。
参考文献
[1]苏仁杰等.寻轨式语音播报送餐机器人系统的软硬件设计[J].单片机与嵌入式系统应用,2015,8:59-62.
[2]李梁等.变电站智能巡检机器人监控系统设计与实现[J].微型电脑应用.2013年第30卷第5期.
[3]原魁等.多移动机器人系统研究发展近况[J].自动化学报,2007,8:785-794.
作者简介
朱亚红 (1985-) 硕士、大学讲师、高级技师 研究方向为自动控制、智能机器人等




共0条 [查看全部] 网友评论