


Abstract: In order to realize the four-quadrant running of the converter, I will build system model. Rectifier and inverter interactive systems are built by MATLAB simulation software in system. The system rectifier model, whose role is as a stable dc source and providing load current, holding DC voltage to keep the load revolve. Rectifier is actually providing stable voltage for inverter, which output power increasingly at the same time, rectifier provide a stable current and voltage for it to sure the reliability of the whole system experiment. By MATLAB simulation research of the system, the main circuit design, parameter design, PLL phase-locked loop and PI regulation to be studied respectively. The simulation waveform is given to prove that the changing parameters, the stability and real time of the system can be affected and how to improve can we when parameter changed.
Key words: Rectification; Inverter; PI control; Power; Harmonic
【中图分类号】U467.4+5 【文献标识码】B 文章编号1561-0330(2017)09-0000-00
1 引言
PWM变流器现在已经不是普通意义上的DC/AC或者AC/DC变换器了,由于电能的双向传输,当PWM变流器从电网吸取电能时,其运行在整流工作状态;而当PWM变流器向电网传输电能时,其运行在有源逆变工作状态。而单位功率因数是指:当PWM变流器运行在整流状态时,网侧电压、电流同相;当PWM变流器运行在有源逆变状态时,其网侧电压、电流反相,变流器(逆变器)向外释放有功功率。现在应用最广的三相变流器都是电压型的,即直流母线靠电容支撑,交流测通过电感并网,网侧与功率单元(开关管输出)之间的压降落在电感上,从而产生电流。三相电压型PWM整流器是基于Boost变换器的工作原理,因此其直流侧电压大于输入交流侧线电压幅值,即具有升压的特性。而三相电压型PWM逆变器是基于Buck变换器的工作原理,因此其输出负载线电压幅值要小于直流电压,即具有降压的特性。总之,三相电压型PWM变流器无论作为整流器还是作为逆变器使用,其直流侧电压始终大于交流侧线电压的幅值。
2 变流器数学建模
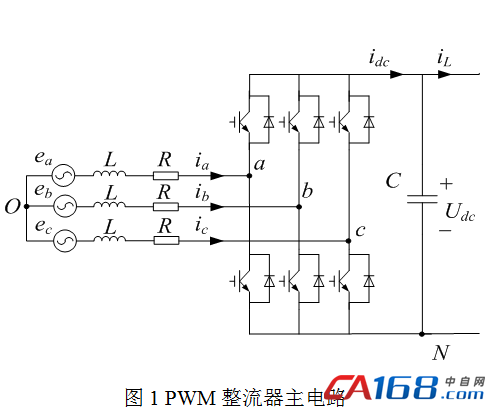
2.1 变流器的主电路数学建模
PWM整流器主电路如图1所示。三相电压源型PWM整流器数学模型的建立可以采用开关函数描述的数学模型。
2.3 PWM整流器的控制策略
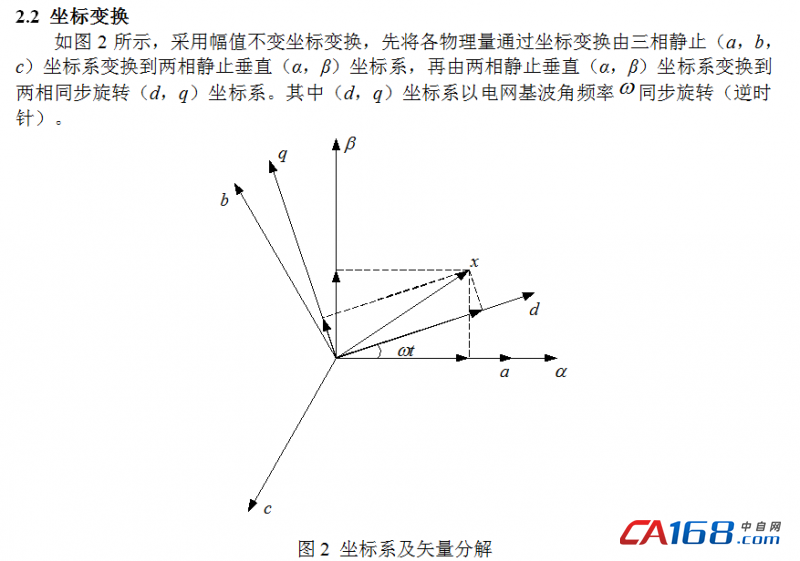
三相电压源型PWM控制系统设计采用双闭环控制,电压外环主要控制三相VSR直流侧电压,使其稳定在指定值,电流内环按照电压外环输出的电流指令对有功、无功电流进行控制,在同步旋转(d,q)轴系下电流控制器跟踪参考电流产生合适的参考电压。然后,参考电压矢量被转换到三相静止轴系中,产生PWM脉冲,驱动开关。三相电压源型双闭环控制系统结构图如图3所示。
3 整流器模型
3.1 主电路模型
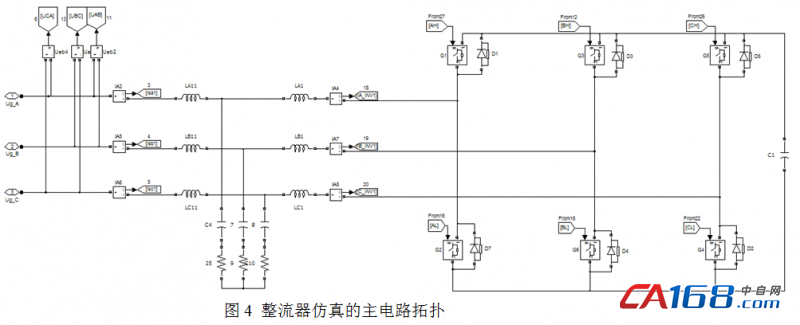
图4是整流器仿真的主电路拓扑,由LCL滤波电路、六支开关管以及母线电压支撑电容C组成。在后面会介绍主电路的具体参数选型。
3.2 参数设置
整流器的参数设计包括以下几点:
(1)交流三相输入的相电压Uin。在三相系统电压平衡的条件下做仿真和实验,模拟
三相电网电压UA、UB、UC的输入皆为Uin=100V;
(2)直流侧母线电压UdcRef。直流母线要控制在稳定的电压范围内,通常会有一定的
波动,该电压波动可根据算法控制参数调节到合适的范围内。本仿真设计UdcRef为300V;
(3)控制参数P、I。在仿真和实际调试时,调节该参数,主要影响的是系统的响应速
度和稳定性。仿真中,综合响应速度和直流母线电压的稳定,设定比例参数P=40,积
分参数I=0.02;具体如图5所示。

3.3 PLL锁相环
控制算法实现的前提必须是采样精准,这在仿真也是一样。在对三相整流器进行控制时,必须要知道当前电网电压的角度。
因此,就出现了PLL锁相环,它的功能主要是跟踪采样电网线电压,通过公式(2)计算出相电压,再经过clark变换公式(3)和park变换公式(4)得出电网电压实际的角度和锁相环的输出估计角度。
通过公式(5),我们可以看到,只要Vq=0,那么锁相环估计出的角度就等于电网电压的实际角度,此时锁相成功,控制算法才可以进行下一步计算。
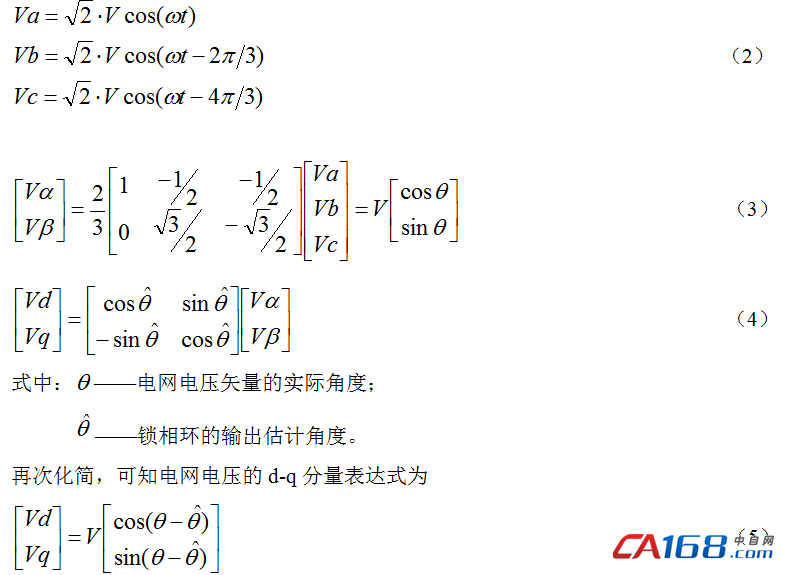
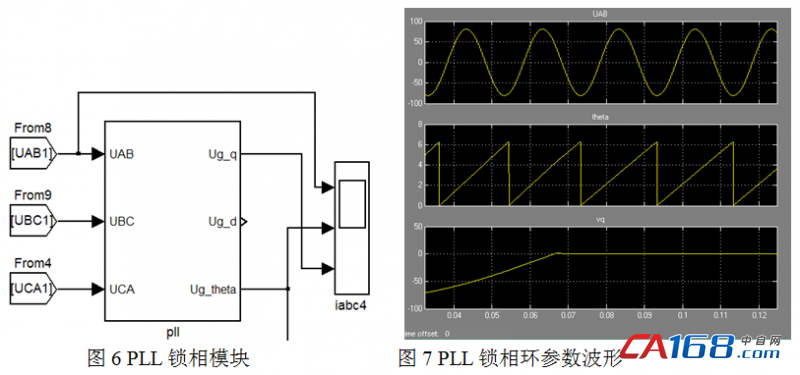
图6为模型中的PLL模块。其输入为三相平衡的线电压。因为在实际系统中,电压采样电路只能采集线电压,所以在仿真中真实的模拟实际采样,在计算时需要将线电压转换成相电压。从图7可以看出,PLL模块中的参数Vq在逐渐趋于0,这个趋近的速度和PLL的控制参数有关系,在实际中不需要太快。一旦锁相成功后,Vq=0,锁相角度theta跟踪上了线电压UAB。
3.4 整流参数PI控制
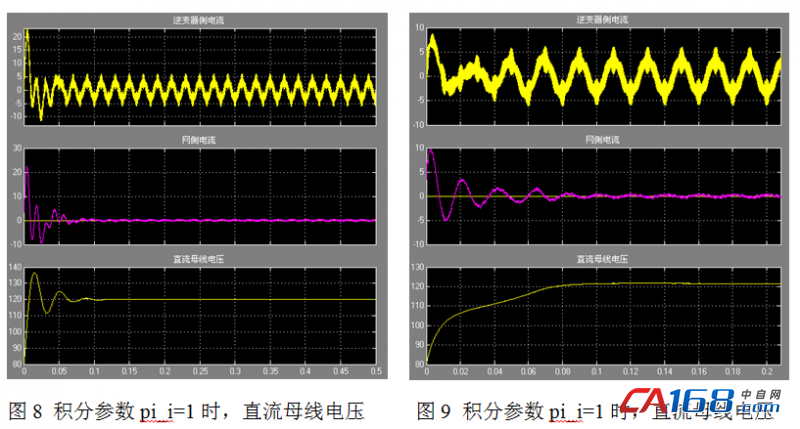
经过仿真,我们可以了解到,在系统不同PI控制参数设定下,系统的响应速度和过程是不一样的,见图8和图9所示。如果积分过大,系统直流母线电压在达到目标稳定前易出现振荡,但是系统调节时间要快一些。而积分过小,直流母线电压在稳定的过程中不会出现过冲的现象,但是达到稳定的时间会长一些。
4 逆变器模型
三相逆变器的功能是通过负载的需求输出能量,而其能量的来源就是直流母线。所以在稳定直流源的条件下,对于逆变器我们要考虑的因素就是输出有功功率、谐波和功率因数。
(1)谐波抑制。三相逆变器的主电路拓扑与三相整流器的主电路拓扑一致,逆变器的交流侧也为LCL并网结构,因为开关组合输出的能量(电压、电流)谐波很大,需要在设计的LCL滤波器作用下,达到国标的设备谐波标准范围内(总谐波5%)设备方可并入电网,从而保证设备自身不会成为谐波源。具体的LCL滤波器设计见后面实物设计方案。
(2)功率因数。因为交流侧LCL滤波器的C电容在逆变器并网时有部分无功功率产生,所以电容的容量需要考虑,在输出有功功率的同时,为了满足功率因数的要求还需要补偿自身滤波器的无功功率。见图10所示,在没有有功电流输出时,逆变器侧A相输出无功电流峰值7A后,网侧A相电流为0A,此时没有无功电流流入电网;在此状态下给定有功电流,如图11所示,此时网侧的功率因数PF始终接近1,满足国标的设备入网功率因数要求。
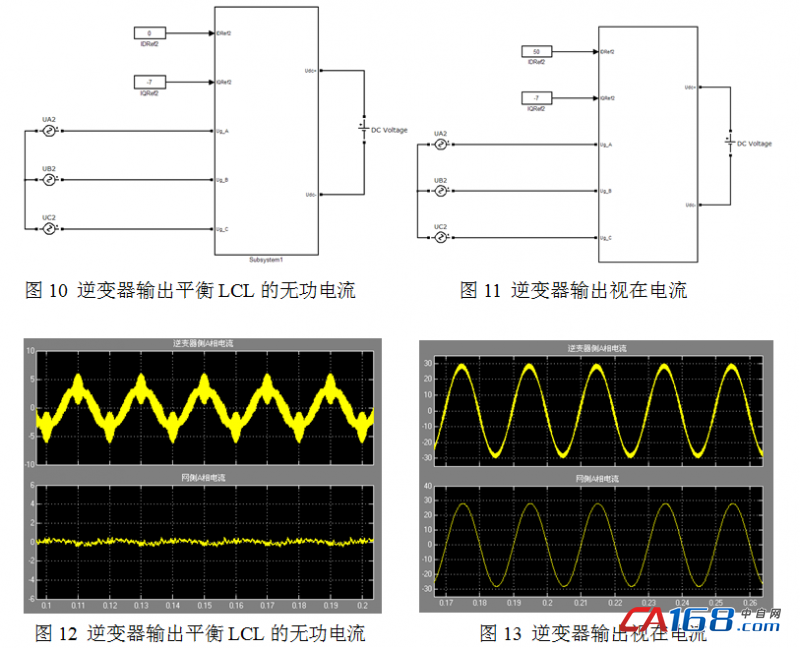
图12为在图13的参数给定下,逆变器侧输出电流及其经过LCL滤波后网侧电流波形。从中我们可以看到,逆变器在只输出无功电流时,A相输出电流谐波比较大,而网侧A相电流谐波很小且值接近为0,这就证明了LCL滤波器的起到了滤除谐波的作用的同时,逆变器输出电流又平衡了LCL的接入电网产生的无功电流。
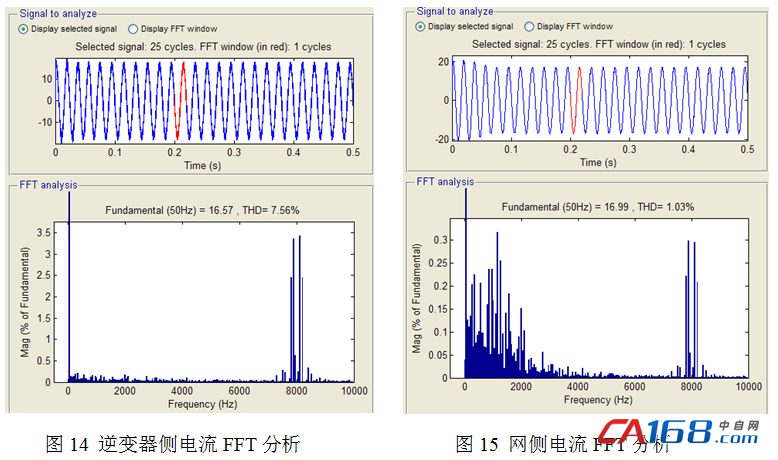
图13为在图11的参数给定下,逆变器侧输出电流及其经过LCL滤波后网侧电流波形。LCL过滤谐波的能力如何判断,需要经过傅立叶分解后,对谐波总值进行计算才能有所对比。如图14和图15,仿真采用了MATLAB中的FFT分析功能,分别对逆变器侧电流及其经过LCL滤波后的电流进行分析;从图14我们可以看到,逆变器侧电流的谐波THD为7.56%,其经过滤波器后的谐波THD为1.03%,如图15所示谐波大大减小的同时,基波含量得以增加。这不仅满足国标对设备的要求同时,也为之后实际调试参数带来很大的裕量。
5 结论
本章在研究整流器和逆变器数学模型的基础上,通过MATLAB仿真软件的使用构建整流器和逆变器模型,分别对其重要参数和关注点进行了分析和对比:
(1)整流器直流母线电压参数精准和稳定;
(2)逆变器输出有功功率、功率因数以及谐波含量;
(3)结合国家标准对以上参数指标进行限制和校准,通过反复的调试参数,得到了令人满意的仿真结果;
(4)仿真建立在数学模型的基础上,实际是为了验证理论算法能否实现的手段。如果仿真能够实现,那么设计在大的方向上应该没有什么问题。对实际的装置算法设计有一定的指导作用。
参考文献
[1]马洪飞,徐殿国,苗立杰.几种变速恒频风力发电系统控制方案的对比分析[J].电工技术杂志,2000(10):1-4.
[2]陈忠斌,胡文华.电力电子技术在风力发电中的应用[J].电源技术应用,2006,9(12):24-25.
[3]张宗巍,张兴. PWM整流器及其控制[M].机械工业出版社,2003:62-82:227-237.
[4]Y.Ye, M.Kazerani, V.H.Quintana. A Novel Modeling and Control Method for Three-phase PWM Converters[C]. IEEE,2001:102-107.
作者简介
何建华 (1984-) 中级工程师 研究方向为电力电子与电力传动




共0条 [查看全部] 网友评论