



Abstract: Decoupling control technology is the key technology to achieve high dynamic and static characteristics of permanent magnet synchronous motor (PMSM). The quality of decoupling control directly affects its control accuracy and stability. In view of the characteristics of the PMSM system, the inverse system method is adopted to decouple the original system and the inverse system, and the linear first-order torque system and the linear first-order torque current system are decoupled. The PMSM will be affected by external disturbance and change its parameters in the operation process, the inverse system method to decouple the anti disturbance ability, this paper design PMSM sliding mode speed controller, the simulation results show that the improved control strategy has the advantages of fast response, small overshoot, improve the anti disturbance ability of PMSM.
Key words: PMSM; Decoupling control technology; SMVSC
【中图分类号】TM343 【文献标识码】B 文章编号1561-0330(2017)09-0000-00
1 引言
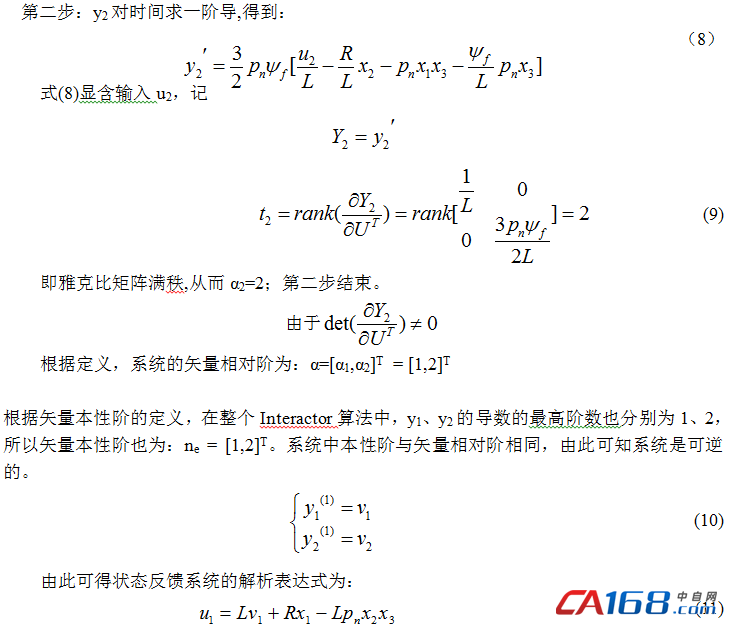
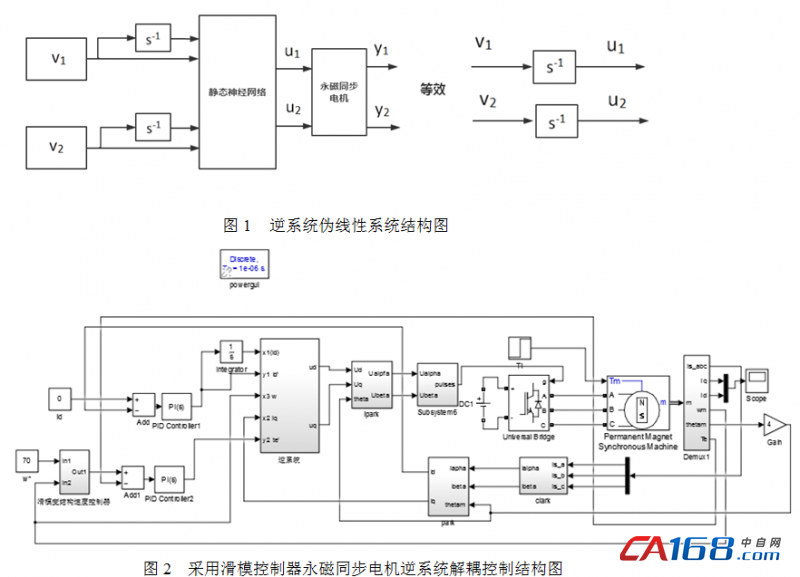
永磁同步电机结构紧凑易于维护、可靠性高、性能优异,在自动化、数控机床、航空航天等工业领域中,已占据越来越重要的地位。永磁同步电机的解耦控制是实现其高性能的重要基础,也是其技术难点之一。目前主要的解耦控制技术有矢量控制、直接转矩控制、微分几何状态反馈控制等。矢量控制是一种基于稳态的近似解耦控制方法,因此对电机控制的动态响应性能不佳;直接转矩控制虽然有着转矩响应快,对转子参数敏感性低的优点,但是存在转矩脉动较大、低速度区间性能不佳的缺点,因此制约了直接转矩控制技术的发展;微分几何法所涉及理论较为复杂,物理概念尚不明确,导致其工程应用较难实现。针对永磁同步电机这一非线性、多变量、强耦合系统,运用逆系统这一反馈线性化方法对永磁同步电机进行解耦,对比其他解耦方法如微分几何方法,逆系统方法所涉及理论简单,物理概念清晰直观,更加适用于工程实际,并且逆系统方法的解耦将原系统解耦成两个伪线性系统,具有较好的动态特性。文献[1]对逆系统原理作了详细证明,并设计出感应电机的逆系统控制,文献[2]对永磁同步电机进行了逆系统设计,但没有涉及逆系统解耦控制中参数变化的问题。本文从分析永磁同步电机的数学模型入手,对永磁同步电机进行可逆性分析并证明其可逆性,将原系统与逆系统复合成一阶线性转矩系统以及一阶线性定子转矩电流系统两个伪线性系统。考虑到逆系统数学模型是建立在参数恒定的情况下,实际运行中电机负载运行导致温度升高,定子电阻与温度存在着明显的非线性关系,此外电磁材料的磁导率也随着温度呈现非线性变化,所以参数变化以及外界扰动情况也是解耦控制过程中需要考虑的问题,其中文献[6]具体介绍了参数变化的原因,本文对此不深入讨论。
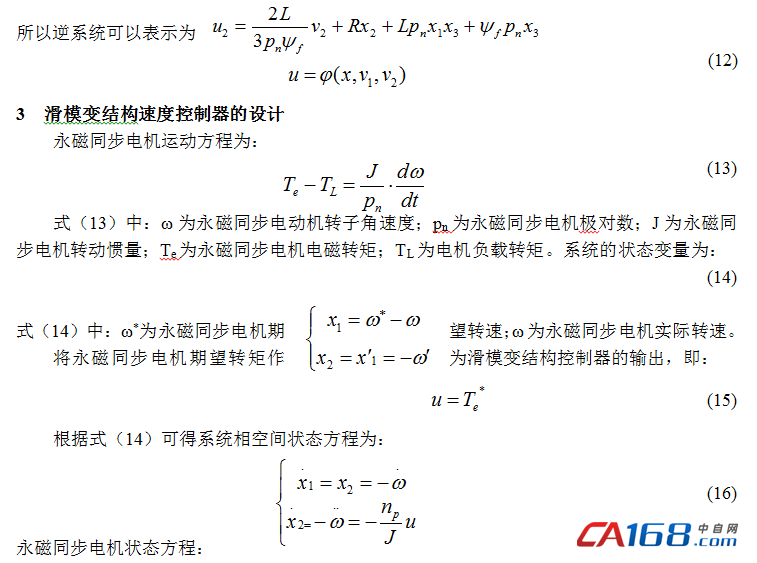
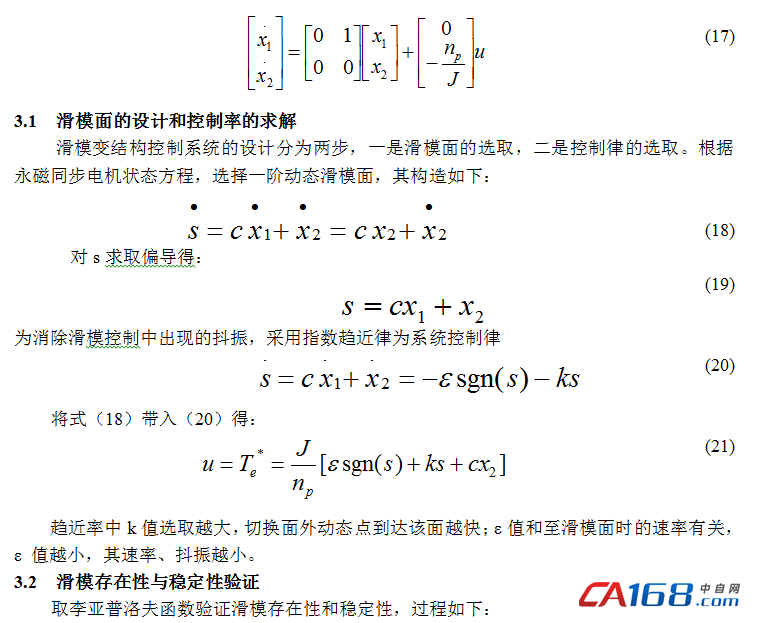
滑模变结构控制是一种控制方法简单、对系统模型精确度要求低和鲁棒性强的控制技术,其中滑模变结构控制系统的滑动模态可自行设计,与控制对象参数变化及外部扰动无关,正适合永磁同步电机这一个非线性、多变量强耦合系统。因此本文在永磁同步电机逆系统解耦控制的基础上结合滑模变结构控制,设计一种改进的永磁同步电机逆系统解耦控制器。
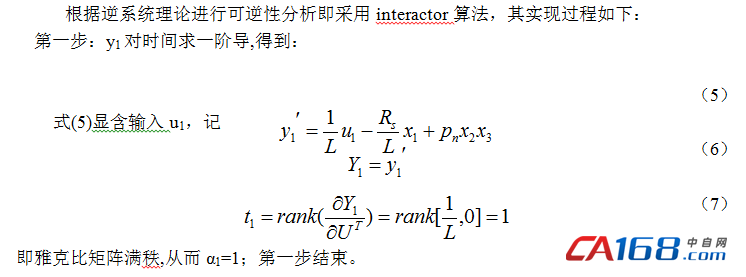
2 永磁同步电机数学模型及可逆性分析
为建立永磁同步电机的d-q轴模型,做如下假设:①忽略空间谐波,设三相绕组在空间上对称放置,所产生的磁动势沿气隙圆周呈正弦分布;②忽略电机铁心非线性饱和影响,认为绕组自感和互感恒定;③忽略铁心损耗;④不考虑频率和温度变化对绕组电阻的影响;⑤忽略转子的阻尼绕组[8]。
基于d-q旋转坐标系中,三相星型连接的永磁同步电机电压方程、电磁转矩方程可以由如式(1)表示:

5 结语
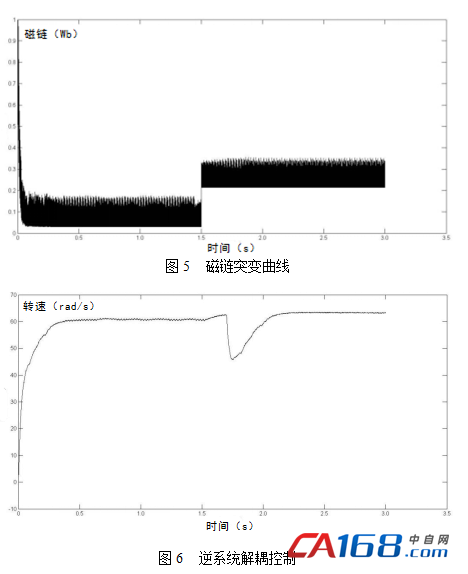
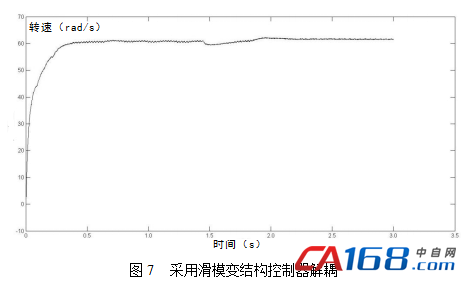
仿真实验表明,在逆系统基础上增加滑模变结构控制能够提高永磁同步电机解耦控制的抵抗负载扰动的能力,对于内部参数的摄动也具有一定的自适应性,为永磁同步电机高性能控制提供了一种新思路。
参考文献
[1]戴先中. 多变量非线性系统的神经网络逆控制方法[M]. 北京:科学出版社,2005.
[2]戴先中, 张兴华, 刘国海,等. 感应电机的神经网络逆系统线性化解耦控制[J]. 中国电机工程学报, 2004, 24(1):112-117.
[3]牛超, 朱振伟, 曹玲芝. 基于逆系统原理的感应电动机滑模速度控制[J]. 工矿自动化, 2012, 38(9):67-70.
[4]赵越, 刘斌. 基于滑模变结构控制的永磁同步电机矢量控制[J]. 微电机, 2016, 49(11):76-80.
[5]谷鑫, 胡升, 史婷娜,等. 基于神经网络的永磁同步电机多参数解耦在线辨识[J]. 电工技术学报, 2015, 30(6):114-121.
[6]李红梅, 陈涛. 永磁同步电机参数辨识研究综述[J]. 电子测量与仪器学报, 2015(5):638-647.
[7]陈荣. 永磁同步电机控制系统[M]. 中国水利水电出版社, 2009.
[8]唐任远. 现代永磁电机理论与设计[M]. 北京:机械工业出版社,1997.
[9]Luo L F, Shang R Y, Li Y, et al. Calculating the coupling reactance voltage of HVDC power transmission system based on new-type converter transformer[C]. International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, IEEE, 2008:1749-1752.
[10]Moon H T, Kim H S, Youn M J. A discrete-time predictive current control for PMSM[J]. IEEE Transactions on Power Electronics, 2003, 18(1):464-472.
[11]Kim J S, Sul S K. High performance PMSM drives without rotational position sensors using reduced order observer[C]. Industry Applications Conference, 1995. Thirtieth Ias Meeting, Ias '95. Conference Record of IEEE, vol.1,1995:75-82.






共0条 [查看全部] 网友评论