


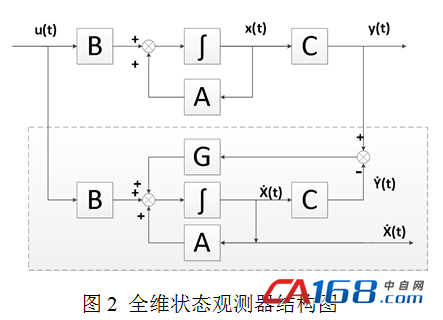
Abstract: Because the stator resistance is affected by temperature, stator frequency and stator current, etc. the performance of the direct torque control system is directly affected at low speed . In this paper, the performance of direct torque control system is improved at low-speed. Stator flux and stator current are taken as the state variables. The full-order flux observer is constructed. And By applying the Lyapunov stability theory, the stator resistance identification adaptive law is derived strictly. The on-line identification of stator resistance improves the low-speed direct torque control system performance. The simulation results showed that the low-speed performance of the direct torque control system can be improved by using the full-order flux observer to identify the stator resistance in MATLAB/Simulink software.
Keywords: Direct torque control; Full - order flux observer; Stator resistance identification; Performance at low-speed
【中图分类号】TM343【文献标识码】B 文章编号1561-0330(2017)09-0000-00
1 引言
当下效率高、结构简单的异步电机被工业生产广泛使用,随着现代控制理论以及电力电子技术的发展,尤其是直接转矩控制技术(DTC)的出现,进一步的提升了异步电机调速性能。直接转矩控制技术思想新颖、结构简单,使算法简单化,且具备优良的动、静态性能。
但异步电机实际运行时,其定子电阻阻值受温度影响较大,阻值变化最高可达额定值的50%。在中高速时,定子电阻对DTC系统的性能影响不大[[i]],但是在低速时磁链和转矩的计算精度受到定子电阻的直接影响,若定子电阻的辨识问题不能得到很好地解决,就会使得定子磁链的观测不准确,进而导致转速发生波动,电磁转矩的脉动也变大,直接导致DTC控制系统的调速范围受到限制。
定子电阻压降对定子磁链的影响见图1。图中外轨迹是0.5倍的理想空载转速![]() 时的六边形磁链的轨迹图形,内轨迹是0.05倍的
时的六边形磁链的轨迹图形,内轨迹是0.05倍的![]() 时的轨迹图形。由图我们可知,外轨迹是一个近似得很好的正六边形轨迹,内轨迹则扭曲得很厉害[[ii]]。
时的轨迹图形。由图我们可知,外轨迹是一个近似得很好的正六边形轨迹,内轨迹则扭曲得很厉害[[ii]]。

为解决低速下定子磁链的辨识问题,许多学者做了大量的研究,目前来讲,主要由两个方面进行改进研究:第一是改进磁链估算方法,提高定子磁连的观测精度;第二是对定子电阻进行在线辨识。
定子磁链估算方法包括常见的一些开环方法和基于观测器的闭环方法。常用的几种开环磁链估算法主要有电流-转速模型法、电压-电流模型法和电压-转速模型法。电压模型法主要用于中高速区域定子磁链估算,对参数依赖性小、鲁棒性好、结构简单。电流模型法需要电流、转速及转子参数,主要用在低速范围内,鲁棒性较差。综合前两种模型的优点,设计出来电压-转速模型法,但其系统模型平滑切换困难,且结构复杂。直接转矩控制系统中用于定子磁链估算的闭环观测器主要有全维状态观测器法[[i]]、滑模观测器法[[ii]]、神经网络观测器[[iii]]和扩展卡尔曼滤波器[[iv]]。这种闭环观测法,受参数变化的影响较小,稍微增加了结构的复杂度,但大幅提高了磁链的观测精度。
常用的在线估计定子电阻方案可分为三类:第一类直接计算法。利用测量值和一个异步电动机稳定状态模型直接计算定子电阻的方法[[v]][[vi]]。但由于该方法用到了较多电动机的参数,因此容易随电机运行状态的变化而改变。第二类方法通过自适应机构来在线辨识定子电阻[[vii]],主要有基于模型参考自适应系统和基于观测器两种方案。第二类方法简单易于实现,是目前应用最为广泛的方法。第三类包括在定子电阻辨识过程中使用人工智能技术如人工神经网络,模糊逻辑控制以及神经模糊控制等方法[[viii]]。该方法对模型的准确度要求很高,且建模复杂,也不常用与实践。
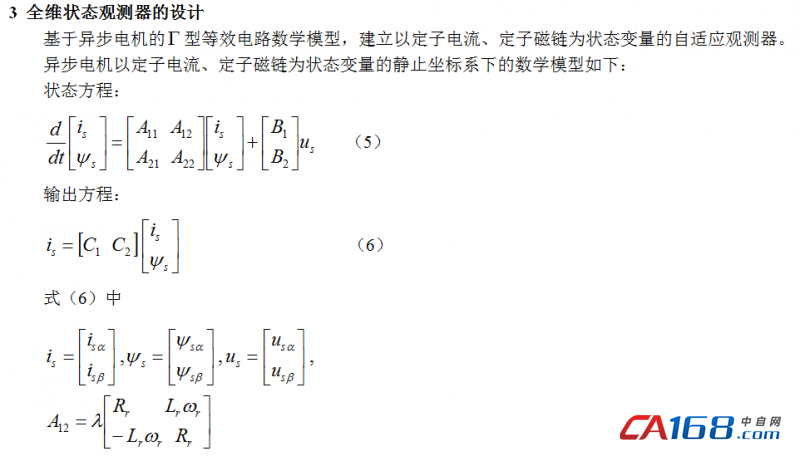
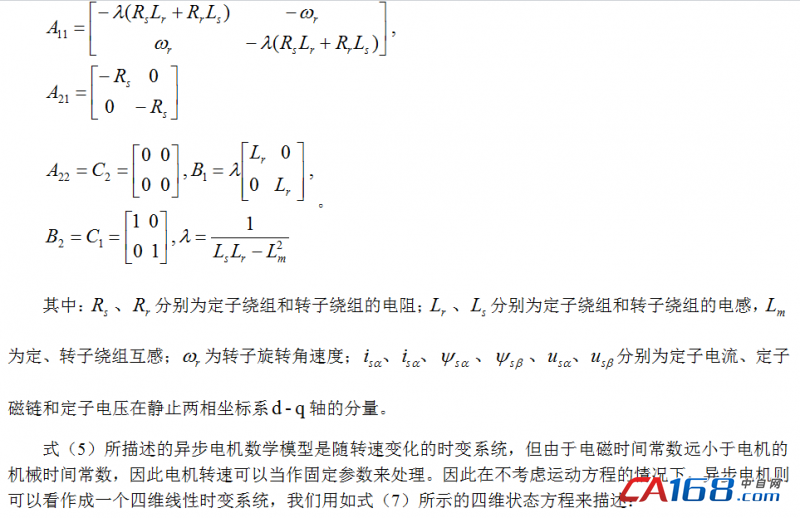
本文以异步电机的![]() 型等效电路数学模型为基础,设计了以定子电流和定子磁链为状态变量的自适应磁链观测器。同时,由于定子电阻变化是影响定子磁链的最主要因素,故推导出定子电阻识别率,对定子电阻在线辨识,利用观测到的定子电阻进行磁链和转矩的计算,进一步提高定子磁链的观测精度,使得电机在低速区依然保持良好的运行性能。
型等效电路数学模型为基础,设计了以定子电流和定子磁链为状态变量的自适应磁链观测器。同时,由于定子电阻变化是影响定子磁链的最主要因素,故推导出定子电阻识别率,对定子电阻在线辨识,利用观测到的定子电阻进行磁链和转矩的计算,进一步提高定子磁链的观测精度,使得电机在低速区依然保持良好的运行性能。
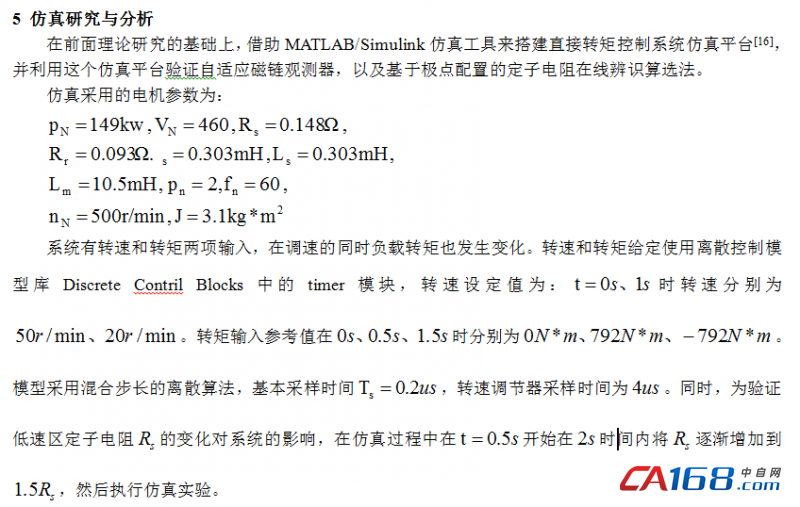
2 理论原理
为了实现系统的状态量反馈,需要实时地提供系统关于状态量的所有输入和输出,而对于一个具体实际的系统而言,这些输入和输出量往往是不容易得到的,因而也就提出了状态重构的概念[[ix]]。状态重构的核心理念不是直接去提取所需的所有输入量和输出量,而是提取有关于这些量的其他状态量,输给状态观测器,用状态观测器去估计出这些要求的输入和输出量,以此来代替实际状态变量的输入和输出。这样使得系统状态量的反馈结构变得更加简单,但同时也要求系统的运算量增加。系统的维数与状态观测器的维数相等的叫全阶观测器,而降阶观测器是系统的维数要比状态观测器的维数大。下面就对本文所提出的全阶磁链观测器的基本原理做一些简要的叙述[[x]]。

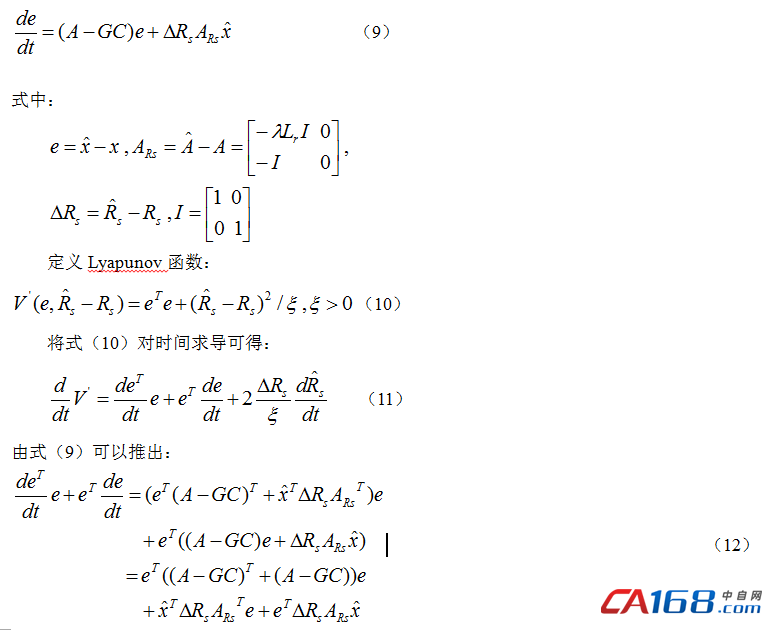
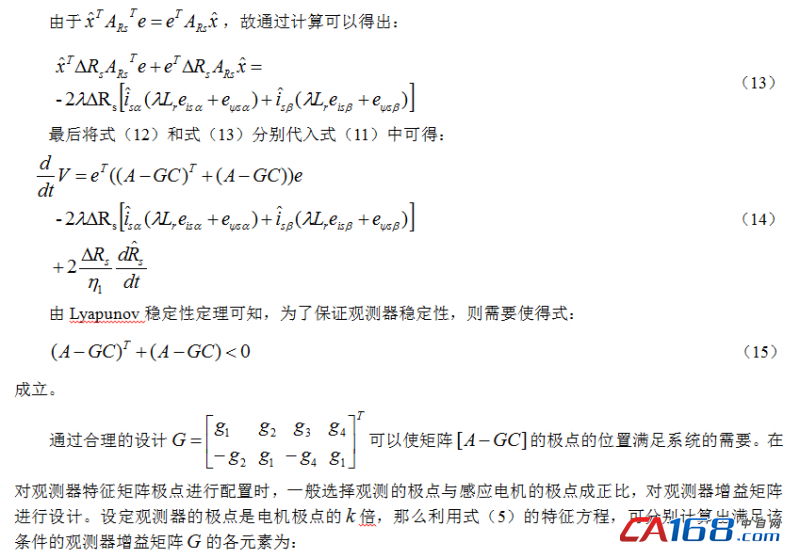
4 定子电阻识别率的推导
在直接转矩控制中以定子电流和定子磁链为状态变量,可利用Lyapunov和Popov超稳定性理论推导出定子电阻的自适应律[[i]]。如果定子电阻在运行过程中发生变化,或者观测器中定子电阻参数值设定不准确,这时需要对其进行在线辨识。
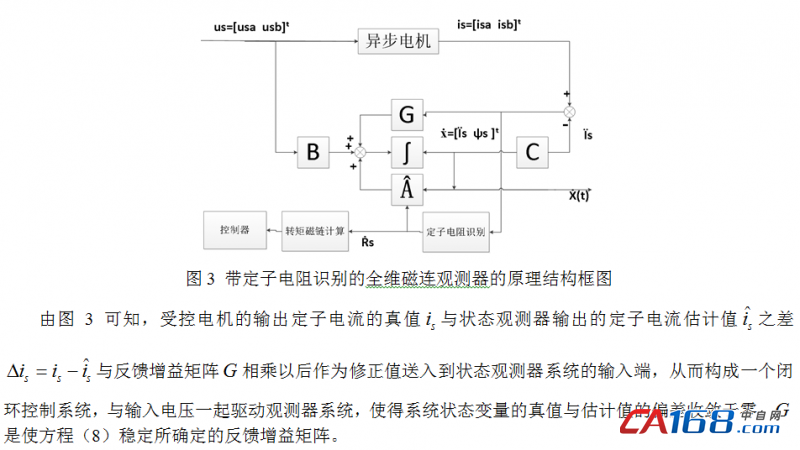
由于在采用全阶磁连观测技术的直接转矩控制技术中,若电子电阻发生变化,系统矩阵也将发生变化,将式(8)与式(5)相减可得误差状态方程如下:
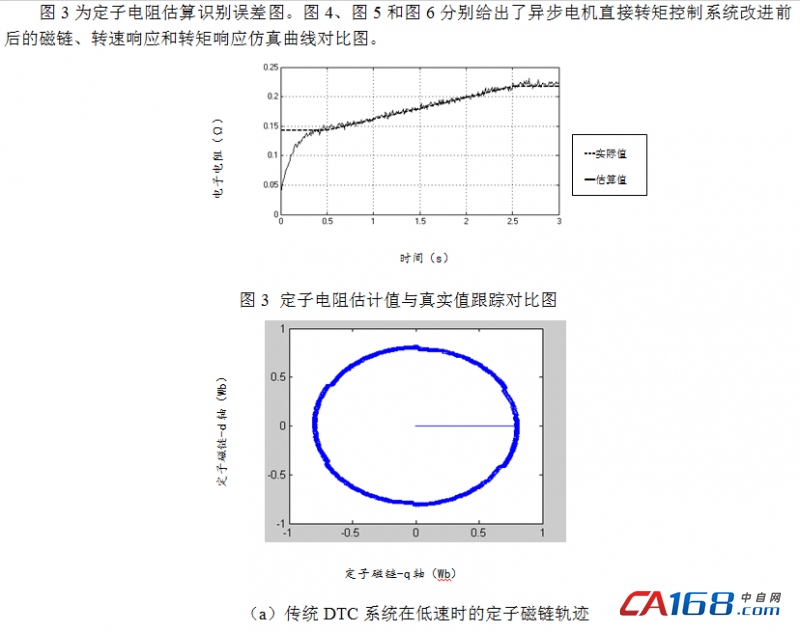
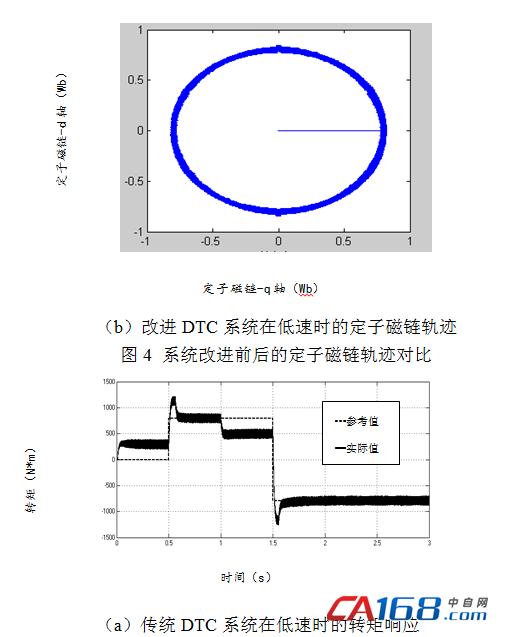
观察图3可知,文中所设计的定子电阻在线识别器对定子电阻有较好的跟踪效果,且跟踪误差很小,因此能够很好地对定子电阻参数进行在线识别。这对直接转矩控制系统低速区的性能改进至关重要。从图4的定子磁链对比分析可以发现:采用全维磁链观测器相比于传统的直接转矩控制系统更能精确的观测定子磁链,进而适时调整磁链使定子磁链更接近圆形,没有太大畸变。由于对观测器中的定子电阻参数进行了在线识别,虽然在2.5s后定子电阻有较大幅度改变,但定子磁链受定子电阻偏差的影响较小,因此该方法对于定子电阻变化的鲁棒性好。
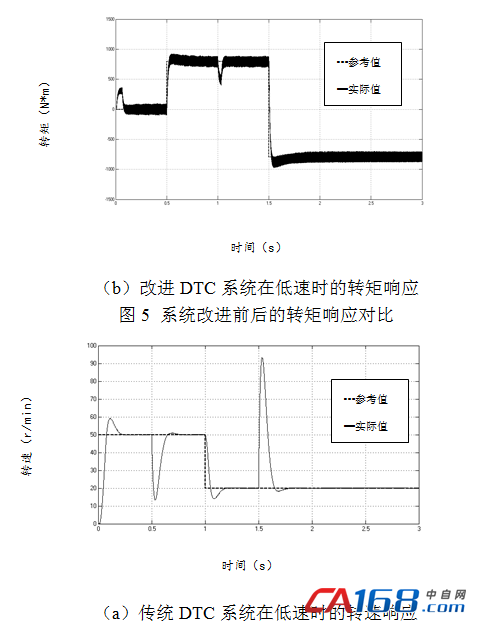
从图5的转矩响应对比可知:改进后的直接转矩控制系统比传统的直接转矩系统的转矩响应更平滑、响应速度快,波动也有所减小。同时改进后的系统输出转矩能及时有效地跟踪所期望的转矩值,并在期望值附近小范围波动。在t=0.5s和t=1s时,易观测到:由于控制转速的改变,传统的直接转矩控制系统的输出转矩出现较大波动,对期望转矩得跟踪效果极差,转矩误差变大。
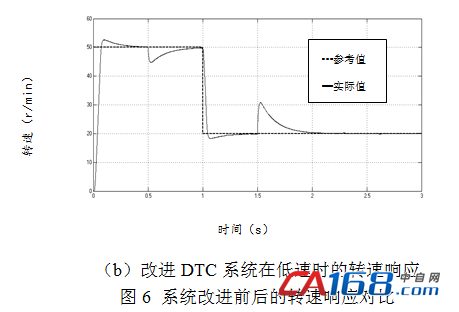
图6是改进前后系统的转速响应对比图。观察对比后可知:带全阶磁连观测的直接转矩控制系统比传统的直接转矩系统的转速响应更平滑、响应速度快,转速和转矩变化后的相互影响也更小,对转矩变化的鲁棒性更好,很好的保持了直接转矩控制系统的优点。
6 结语
文中分析了以定子电流、定子磁链为状态变量构成的异步电机状态观测器方案,并给出了定子电阻自适应率.仿真结果和实验表明,基于模型参考的全维状态观测器,对参数变化有较好的鲁棒性,对定子电阻变化有较强的抗干扰能力,转速、转矩相应更快速平滑,波动更小。全维状态观测器把异步电机模型作为参考模型,将包含估计参数的重构模型作为可调模型,此观测器在低速区可以较准确地观测定子磁链。由于观测器本身也包含有大量电机参数,故观测器也会受定子电阻变化影响,故需要设计在线状态观测器来实时估计定子电阻,虽然系统结构变得相对复杂了,但这样做可以提高磁链观测精度,使得转速、转矩响应更平滑稳定。据此,本论文提出的基于全阶观测器对定子电阻进行辨识的方法是有效的。
参考文献
[[1]] 李夙. 异步电机直接转矩控制[M].北京:机械工业出版社,2001.
[[1]] 李华德. 交流调速控制系统[M].北京:电子工业出版社,2003.
[[1]] Hori Y. A novel induction machine flux obserber and its application at high performance AC drive system[J]. IFAC,1987,120(4):363-368.
[[1]] Chen F. Dunnigan MG. Comparative study of a sliding-mode obserber and Kalman filters for full state estimation in an induction machine[J] .IEEE Proceedings Electric Pow Applications, 2002, 149(1):53-64.
[[1]] NIed A, Seleme I, Parma G, et al. On-line training algorithms for an induction motor stator flux neural obserber[J]. IECON,2003(5):129-134.
[[1]] Comnac machines V, Cernat M. Sensorless direct torque control and stator flux of induction using an Applications, 2001 extended kalman filter[J]. IEEE International Conference on Control:674-779.
[[1]] Umanand L, Bhat S R. Online estimation of stator resistance of an induction motor for speed control applications[J]. IEEE Proceedings on Electric Power Applications, 1995,142(2):97-103.
[[1]] Kerkman R J, Seibel B J, Rowan T M, et al. A new flux and stator resistance identifier for ac drive systems[J]. IEEE Transaction on Industry Applications, 1996,32(3):585-593.
[[1]] Jehudi Maes, Melkebeek Jan A. Speed sensorless direct torque control of induction motors using an adaptive flux observer[J]. IEEE Transaction on Industry Applications, 2000,36(3):778-785.
[[1]] Cabrera L A, Elbuluk E, Husain I. Tuning the stator resistance of induction motors using artificial neural network[J]. IEEE Transaction on Power Electronics,1997,12(5):779-787.
[[1]] 刘豹,唐万生. 现代控制理论[M].北京:机械工业出版社,2011.
[[1]] 宋文祥. 三电平逆变器异步电机直接转矩控制的研究.上海大学博士学位论文[C]. 2006:79-104.
[[1]] Marnefors L, Nee H P. Full-order observers for flux and parameter estimation of induction motors[C]. EPE97,1997,3:375-381.
[[1]] Kubota H. Speed sensorless field-oriented control of induction motor with rotor resistance adaptation[J]. IEEE Trans. On Industry Applications, 1994,30(5):1219-1224.
[[1]] 黄志武. 无速度传感器直接转矩控制控制策略的研究.中南大学博士学位论文[C]. 2006:51-34.
[16] 洪乃刚. 电力电子、电机控制系统的建模与仿真[J].北京:机械工业出版社,2013.
作者简介
闫小宇 (1991-) 男 在读硕士研究生 研究方向为电力电子与电力传动方向




共0条 [查看全部] 网友评论