



Abstract: For the logistics of the distribution, the modernization of the sorting system for the efficiency and
quality of the operation to provide a solid technical assurance. Over the past decade, domestic and foreign scholars
have paid great attention to the study of machine vision, published and put forward many theories of visual
technology, and the introduction of machine vision can make automatic sorting system save a lot of cost under the
premise of more efficient and accurate. This paper aims to summarize the theory of sorting system based on
machine vision, Firstly, the basic structure and flow of the sorting system based on machine vision are introduced,
and the process is divided into three theoretical modules: target tracking, target recognition and visual servo; Then,
the domestic and foreign theories related to the machine vision sorting system are summarized, summarized and
analyzed in the framework of these three theoretical modules; Finally, the application of sorting system based on
machine vision in a number of fields is introduced, and the future research trend is prospected.
Key words: Machine vision Target tracking Target recognition Visual servo Sorting system
【中图分类号】TN99 【文献标识码】A 文章编号1606-5123(2017)09-0000-00
1 引言
自动分拣系统(Automated Sorting System)始现于二战之后,其以分拣大型或者中型物流为主。主要由四个环节组成:输送环节、控制环节、分类环节、分拣环节,并且这四个环节通过计算机网络进行相互联系,加上一系列人工操控与处理形成了一个完整的自动分拣系统[1]。随着工业自动化对生产的要求不断增长,机器视觉于20世纪60年代被提出。机器视觉技术在中国起步比较晚,但其市场在2015年就占到了全球的8%,发展速度迅速使得中国成为全球第三大机器视觉市场。同时随着我国出台一系列政策:“中国制造2015”、“工业4.0”等,机器视觉可以在运输、无人飞机或汽车、智能机器人、医疗等领域应用前景十分广阔[2]。对于物流的配送,现代化的分拣系统为作业效率和质量的提高提供了坚实的技术保证。近十年来,国内外学者对机器视觉的研究都十分重视,发表和提出了许多视觉技术的理论,而引入机器视觉的自动分拣系统的研究也受到密切关注。引入机器视觉的自动分拣系统具有经济性、高效性、精确性、抗干扰性等特点。能够保证在精确、快速工作的前提下节约大量成本,并且适应多种环境,有一定的抗干扰能力。目前机器视觉技术在自动分拣系统上的应用已经日益成熟,基于机器视觉的分拣系统主要在获知工件类型以及工件在传送位置的实时信息前提下,通过图像传感器对工件进行图像采集,根据离线编程的预设程序,引导机械臂对其进行分拣。现阶段国内外学者正对基于机器视觉的自动分拣系统进行更深一部的研究,针对分拣速度、精确度、抗干扰度等方向对分拣系统进一步的完善[3]。机器视觉技术的在自动分拣系统市场中已经扮演着至关重要的角色。
2 基于机器视觉的分拣系统
当人工对工件进行分拣时,我们首先将找到的工件通过眼睛,把工件的图像传至大脑,再由大脑根据所指的工件分类指标对此工件进行分类判断,依照判断结果,我们用手将工件抓取到对应的位置,这就是分拣最原始的流程。在之后人们也正是以这个原始流程为原型对分拣系统进行设计和不断完善发展的。
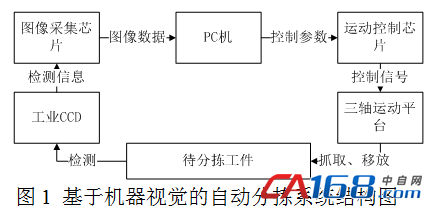
再回到基于机器视觉的自动分拣系统,我们一般用工业CCD即工业相机与图像采集卡代替原始流程中的眼睛,PC机充当大脑的角色,将图像信息进行处理;而一般常用到的三轴运动平台即机械臂代替我们的手,由PC机通过运动控制卡对其进行控制,从而抓取工件进行分拣[4]。其原理组成结构参见图1所示。
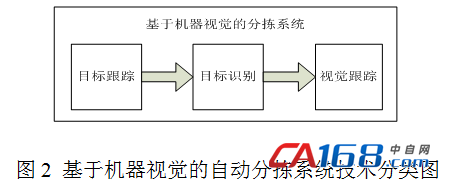
自动分拣系统基本组成看似简单,但是为了使各个模块能够稳定、协调、高效地工作,其设计在不断完善下变得越来越复杂,涉及到的算法也越来越精妙。其涉及到的技术根据在整个系统中所起到的作用大致可以分为三类:目标跟踪技术、目标识别技术、视觉伺服技术。如图2所示,其中目标跟踪技术解决的使我们寻找工件的问题;目标识别技术解决的是我们对图像进行判断和分类的问题;视觉伺服技术则是最后对工件进行分拣操作的问题。在接下来我们将会对基于机器视觉的自动分拣系统在近年来所用到的相关理论与算法进行分类介绍。
3 基于机器视觉的分拣系统相关理论
本文把基于机器视觉的自动分拣系统按流程依次分为三个部分:目标跟踪、目标识别、视觉伺服。一般自动分拣系统要对传送带上运动中的工件进行分拣时,目标跟踪技术无疑是系统进行分拣的的前提;而为了最正确的进行分拣,目标识别技术便是整个分拣系统的关键;最后视觉伺服技术驱动机械臂精确、快速地对工件进行分拣,其是整个分拣系统高效率工作的保障。近年来,国内外学者对机器视觉在分拣系统的应用不断进行完善,涌现了许多算法与思路,基于机器视觉的自动分拣系统正在不断走向成熟。
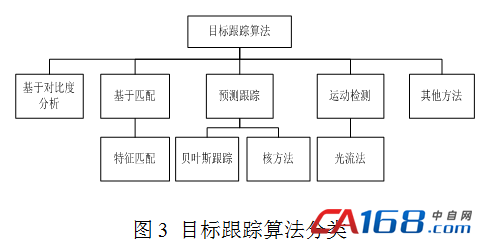
对于自动分拣系统,目标跟踪指的是将获取的传送带上工件的视频细分为多帧的图像,分别定位每帧图像中工件所在的位置,从而得出目标的运动轨迹,再由跟踪器在根据其运动轨迹获取工件更精确的图像。如图3所示,根据需要跟踪的目标自身信息的不同以及跟踪环境的不同,目标跟踪的方法可以大致分为五类:基于对比度分析的方法、基于匹配的方法、预测跟踪的方法、运动检测的方法以及其他方法。
3.1 基于对比度分析的方法
基于对比度分析的方法。基于对比度分析的方法主要是在每一帧图像中通过根据目标图像与目标背景的差异来锁定目标,其根据参照点的不同,一般有边缘跟踪、形心跟踪和质心跟踪,此类算法适合背景图像较为简单的目标跟踪。
边缘跟踪指的是对单帧图像中目标图像边线的提取,忽略其边线以内的图像信息,从而勾勒出目标的边缘特征,形成的边缘图形数据量极小。边缘检测是边缘跟踪算法的关键所在,通过对图像边缘像素的领域构建的边缘检测算子,观察其算子内灰度的变化,采用方向导数的变化规律来构建边缘曲线。一般使用到的方法有Canny算子检测法[5]、拉普拉斯算子检测法[6]、梯度子检测法等[7]。边缘跟踪具有计算量少,响应速度快的特点,但是其极其容易被图像噪声干扰,跟踪的随机误差较大。
形心跟踪指的是对目标图像和其背景图像进行二值化分割,从而得到其二维图像,再根据二维图像进行处理和计算从而确定目标的中心位置。对于相对较为简单的背景,形心跟踪具有较高的速度与精度,但是背景复杂后,目标跟踪计算量增大,跟踪性能则显得不太理想。近年来,国内外学者对其阈值的分割进行完善,提出了一种目标峰值自适应的检测方法[8],在该方法检测下,形心跟踪能更加精确和稳定。
质心跟踪算法与形心跟踪算法相似,同样是采用对图像进行二值化分割,从而,再通过计算和处理得出质心位置。相比于形心跟踪,其需要计算二级质心,即在得出粗质心之后在一步精确质心位置,其计算量要比形心跟踪大得多,但是跟踪目标时不受目标大小、旋转运动的影响。该算法需要目标周围灰度均匀,国内学者已对其进行了进一步的改进,提出了一种改进的群目标自适应质心跟踪算法[9],提高了对扩张目标的跟踪能力。
3.2 基于匹配的方法
基于匹配的方法。基于匹配的方法是在相邻两帧图像中根据特征的匹配从而确定目标图像,这个过程也称之为特征匹配,特征匹配一般因特征提取方法与特征的选择不同而分为多种方法。
针对特征提取,其指的是将图像的特征从高维的空间提取到低维得的空间,现如今总共总结有四种典型的特征计算理论:特征空间论、特征空间的近似、神经还原理论以及结构分结论。
而针对特征的选择,我们一般选择的特征是:外形轮廓、几何形状、特征点以及子空间特征。近几年来,经常被用到的算法有:SURF算法[10]、KLT算法[11]、SIFT算法[12]和Harris算法[13]。而有些目标的特征经常是随目标运动而变化的,对此,一般用到直方图以统计的方法对目标特征进行描述,常用到的有边缘方向直方图和彩色直方图。
3.3 基于预测跟踪的方法
预测跟踪的方法。预测跟踪的方法,相比于传统的特征匹配方法,其具有一定的预测性。即跟踪目标在随机运动时,可以通过该方法比较准确的预测目标下一时刻到达的位置。针对粒子子退化的为题,可以划分为贝叶斯滤波的方法和核方法
先看到贝叶斯滤波跟踪方法,对于高斯线性模型,一般采用的是卡尔曼滤波(KF)[14]。KF能够预估目标运动的位置,从而特征匹配只需在预估位置进行特征提取,减少了一定的工作量与检测时间。而针对非线性的高斯模型有KF的两种变形算法,即EKF与UKF。对于非高斯非线性模型,我们一般用到的是粒子滤波(PF),PF能对跟踪目标的运动变化与形状变化定义一个可靠地分布函数,从而实现对目标进行预测跟踪,其后还引进了重采样技术[15]对其进行了完善,但仍存在粒子退化等问题。
至于核方法,其直接对跟踪目标的相似概率密度函数进行连续估计,在精确定位采样粒子的同时,有效的简化了采样过程,并消除了之前提到的粒子退化的问题。其具有代表性的方法是Mean-shift[16],Mean-shift跟踪算法将数据点按其矢量方向收敛于一个概率密度极值点,能够稳定的定位目标位置,但是对与模型较为复杂的目标效果不是很好,之后又有多核跟踪算法[17]与最优核平移算法[18]等对其进行完善。
3.4 基于运动检测的方法
运动检测的方法。运动检测的方法区别于前两种方法,不是对单帧的图像进行定位目标,而是根据目标与背景运动的方向不同来锁定目标,只需将图像划分为目标区域与非目标区域,该方法可用于多目标的检测与跟踪。传统的运动检测方法有三种:光流法、帧间差分法和背景减除法。
光流法[19]是运动检测方法最为代表性的方法,光流指的是目标图像像素点变化的瞬间速度,经过计算各帧图像中各像素点分布的时域变化和相关度,将二维速度场与灰度相联系,通过得到的光流约束方程得到跟踪目标的位置。根据计算方法的不同可以有基于能量、匹配、相位、梯度以及神经动力学的不同方法。
帧间差分法[20]是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,当监控场景中出现异常物体运动时,两帧图像相减,亮度差的绝对值,分析视频或图像序列的运动特性,锁定跟踪目标。该算法较为简单,能够适应各种动态环境,稳定性较好,但是不能提取出目标的完整区域,只能提取出边界,并且依赖于选择的帧间时间间隔。
背景减除法[21]与帧间差分法相似,但其查分运算的是单帧图像与背景图像,其跟踪目标速度快,检测准确,易于实现,其关键是背景图像的获取。但是在实际应用中,静止背景是不易直接获得的。
3.5 其他方法
其他方法。我们常用的一般是对单目标单特征的跟踪,生产应用中常常会遇到需要对多个目标进行跟踪、目标单个特征不明显等问题,于是又有多目标跟踪和多特征跟踪等方法出现。
对于多特征跟踪,不同特征可以从同一个传感器获得,如色彩和轮廓、色彩和边缘、色彩和梯度等。在贝叶斯滤波的框架下,如果特征相互独立,可以对各个特征进行加权然后再进行组合;至于相互关联的特征,可以将相似度概率密度分布进行线性组合[22]。
对于多目标跟踪,主要算法有概率数据关联与联合概率数据关联,起主要是根据多个特征来检测目标的相似度,从而可以对不同目标进行编号,即不同目标拥有不同的的特征检测标准。除此之外还存在另一种多目标跟踪的方法,即随机集滤波和有限集统计算法,该算法相比于前者可以有效的解决目标数量增减的问题[23]。
4 目标识别的相关理论概述
对于自动分拣系统,目标识别自动分拣系统是将目标跟踪的到的工件图像经过预处理,将工件进行识别与分类,即利用信息处理与计算机技术模拟人类的认识、理解过程。目标识别根据其识别的过程可以分为三部分:图像分割、特征提取、识别分类[24]。
4.1 图像分割
在得到的单帧图像中,目标图像与其背景已经融合为一体,而为了后续的图像识别归类,我们需要将目标图像与背景图像分割开来,这就是图像分割。图像分割技术运用的好坏往往能影响到目标识别的精准与快速性,近年来,国内外学者都对其做了许多深入的研究。根据分割途径的不同,图像分割可以划分为三种:基于阈值的分割、基于区域的分割和基于边界的分割。
基于阈值的分割技术[25]中,阈值指的是对图像灰度值的一个定量,计算机将图像中大于或者小这个阈值的部分分为两类,在依据之前的定性,划分为目标图像与背景图像。阈值法的算法较为简洁,分割较为快速,是现如今最为常用的分割方法,但是这种分割方法适用范围小、分割精度较差。
基于区域的分割方法[26]可以分为两种方式:区域生长和分裂合并。区域生长可以理解为点到面的分割,先由单个像素点开始,不断合并,一直达到需要分割的目标图像。分裂合并则与区域生长相反,从图像整体开始,不断分裂排除,直至达到目标图像。基于区域的分割方法较优于阈值法,其考虑到了图像的相似性与相邻性,因此抗干扰能力强,具有很好的鲁棒性。
基于边界的分割[27]利用的是同一个事物相邻部分灰度变化是连续的,因此可以区分两个不同的事物,由多个灰度变化剧烈的像素点连接,勾勒出目标的边界线。边界分割法计算效率高,逼近最优解,但一旦像素点连接后,图像不收敛则得不到目标轮廓;再者该分割法只适用于对轮廓形状进行分类的目标识别,对于颜色、纹理的分类,该分割方法是不适用的。
4.2 特征提取
特征提取指的是对目标图像提取有用的特征,其处于目标识别的中间步骤,对目标识别的精度起着决定性的作用。可以根据特征提取区域的大小分为全局特征与局部特征的方法。基于全局特征的特征提取是直接从图像的原始灰度图,通过提取方向图和奇异点来实现分类,其对于图像变形具有较高的抗干扰能力,但是对图像的质量要求很高。目前,比较受欢迎的还是基于局部特征的特征提取方法,常用的检测方法有:稀疏选取、密集选取还有其他方式选取。
稀疏检测为对于原始图像中,对存在较为突出的特征点的局部区域进行特征提取,其被用于对外形特征明显的目标进行识别,典型代表有DoG算子[28]、SalReg算子[29]、Harris-Laplace算子[30]等,其优点是算法较为简洁快速,能为之后的识别过程节省时间。
密集选取方法则是对原始图像整个进行特征提取,其适用较复杂、特征较多的目标识别,因为忽略了一小部分特征很有可能会对这类目标识别起到极大地干扰作用。虽然密集选取方法更为精确,但其庞大的工作量并不适用于分拣系统等要求高效高速的应用。
对于其他方法,则没有被上述提到的所约束。如Nowak等[31]提出在自动分拣系统识别的库中如果样本够多,随机获取特征的方法也能达到很好的效果;如Moosmann等[32]提出的使用显著性映射在分类过程中动态选取图像块的方法等。
4.3 识别分类
识别分类即目标识别的主要环节,同时也是整个自动分拣系统的关键所在。识别分类运用到的分类器是目标识别过程的核心部分,其设计是机器在训练样本上不断学习和不断优化的过程。按照分类器的学习过程可以分为有监督和无监督识别[33]。
无监督识别主要根据样本和实际目标的特征向量相似度是否在一定区间内,如果在则归为该样本的分类。其不同的算法针对不同的分类,不同算法导致的结果也有可能不同,需要不断的实践择优选取。这也是目前常用到的分类器设计方法。
而有监督识别中,分类器学习的信息是经过人为进行标注的信息,通过挖掘已知的信息来设计分类器,能够以较小的训练量获得精度高的分类器模型,但是一旦需要学习的信息过多时,其标注的工作量也变大,非常损耗人力资源,与自动化理念不相符合。
5 视觉伺服的相关理论概述
视觉伺服,一般指的是通过光学传感器或者非接触类型传感器接受目标图像,再通过图像反馈的信息,对机器做进一步控制。对于自动分拣系统,视觉伺服即对目标图像进行目标识别分类后,计算机驱动机械臂对工件进行分拣的过程。根据反馈信息的类型,我们可以把视觉伺服分为三类:基于图像的视觉伺服、基于位置的视觉伺服以及2.5维混合视觉伺服。
5.1 基于图像的视觉伺服
基于图像的视觉伺服工作原理[34]是:将当前得到的目标图像特征信号与给定的特征信号进行对比的得到误差,然后再根据误差反馈到视觉控制器形成单闭环控制,其具体结构图如图4所示。
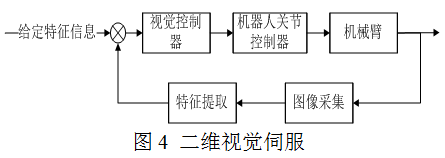
基于图像的视觉伺服也就是二维视觉伺服,其构造雅克比矩阵来描述给定的特征信息与机械臂不同关节之间对应的关系。二维视觉伺服对于光学传感器模型的偏差具有很好的抗干扰性,能够保证机械臂与目标都位于光学传感器视野内,但是因为雅克比矩阵的奇异性,二维视觉伺服可能出现不稳定的情况;同时还有局部特征收敛区间过小的问题。针对其收敛区间过小的问题,Hashimoto与Morel提出了扩大该区间的一系列方法。
5.2 基于位置的视觉伺服
基于位置的视觉伺服[35]相比于基于图像的视觉伺服,其将图像特征信号在三维坐系转换为位姿信号,即反馈误差变为机械臂期望位置与机械臂当前位置的空间误差,仍然构成一个单闭环反馈系统。其结构图如图5所示。
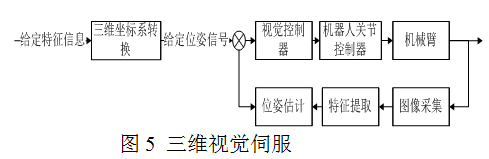
基于位置的视觉伺服也就是将二维视觉伺服通过三维坐标系转换成三维视觉伺服,其优点在于更容易掌握,可以直接在笛卡尔空间控制机械臂的运动。然而其缺点是不能够保证机械臂与目标同位于光学传感器视野中;对机械臂模型精度敏感,易受误差影响;同时二维信号转化为位姿信号工作量大,不能达到高效率的要求。
5.3 维混合视觉伺服
考虑到二维视觉伺服与三维视觉伺服所存在的弊端Chaumette提出了一种混合视觉伺服[36],即2.5维视觉伺服,它将图像特征信号与位姿信号进行结合,并根据其综合的误差反馈,即深度比来调节机械臂。其具体结构如图6所示。
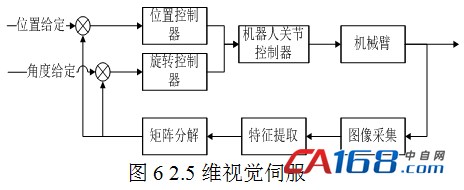
2.5维视觉伺服很好的综合了上述两种视觉伺服的优点,解决了局部收敛区间过小、雅克比矩阵出现奇异点等问题,同时还具有较好的鲁班性。但是,它仍然不能保证机械臂与目标处于同一视野内,并且矩阵求解后,其结果可能不唯一。所以2.5维视觉伺服虽然优越性明显,还是需要对其进行不断的完善。
6 基于机器视觉的分拣系统的应用
基于机器视觉的分拣系统因其高速性、实时性在国内分拣系统中的应用日益成熟,应用领域正在快速扩大。现在其大多被应用于农业、医疗业、工业以及生物研究等。
6.1 水果分拣
现在农业正呈高速现代化发展,而对于农作物收割后的分拣流程单单依靠人力显得费时费力,将基于机器视觉的分拣融入农业无疑能对农业的生产效率进行极大程度的提高。例如其在水果分拣上的应用,有一种基于机器视觉的水果分拣系统[37],其依靠边缘跟踪对目标水果进行跟踪,再通过形状、颜色特征对水果进行识别归类,最后利用二维视觉伺服系统,驱动机械臂对水果进行分类。该水果分拣系统能够精确的分辨出水果的类型、大小情况以及好坏程度,能够大量的节省人力物力,对农业现代化发展有着重大影响。
6.2 药片分拣
在制药行业,药片后期加工后会出现断裂、异色、漏印等问题,快速的将这些残次药品分拣出来能大大的提高制药的生产效率,节约成本,现有一种基于机器视觉的药片表面缺陷识别与分拣系统[38]提出。在该分拣系统中通过边缘检测对目标进行跟踪,然后基于预先获取生产线上合格药片的图像构成模板,即有监督的识别方法将标准模板与实际图像对比分类。分类后,再通过二维视觉伺服驱动机械臂对该药片进行合格与不合格的分拣。
6.3 工件分拣
在高速的工业生产中,机器视觉的应用可以使得分拣过程具有检测速度快、实时性好、可靠性高的特点,并且对于特殊的工件可以实行无接触、无损的检测分拣。现有一种基于机器视觉的分拣系统[39],采用形心跟踪的方法对工件进行实时的跟踪,并采用模式识别的方法对工件进行分类,最后通过三维视觉伺服系统对工件进行分拣,能够快速且高效地对多种类的工件进行分拣。
6.4 鸡蛋胚胎分拣
在生物学的研究中往往要采用大量的生物样本,而对各个生物样本的特征进行分类无疑成为一项耗时巨大的工作。基于机器视觉的分拣系统的引用能够是这一工作简单化。例如现如今出现一种基于机器视觉的鸡蛋胚胎成活性检测及分拣系统[40],该系统通过质心跟踪锁定目标图像,再对目标图像进行滤波、阈值分割处理,根据形态学进,通过判断胚胎中血丝数量对胚胎成活性进行判断,最后利用三维视觉伺服系统驱动机械臂完成分拣。
7 结束语
综上所述,机器视觉在分拣系统的应用已经成为国内外学者对分拣系统设计的一大热点。基于机器视觉的自动分拣系统具有可以让分拣过程更加智能化,可以适应更加复杂的生产环境,同时还能提高生产效率,满足负荷较高的生产要求等优点。国内外学者在目标跟踪、目标识别、视觉伺服等技术领域都得到了快速发展,但是在这些技术领域仍有需要进行完善的地方。例如,目标跟踪方面多模、多特征的跟踪技术还不太成熟;目标识别方面,对于日益增高的识别精度要求,还应该出现更加高速、精确、立体化的目标识别技术;对与视觉伺服,具有良好发展前景的2.5维视觉伺服技术还仍在完善之中等等。精确性、鲁棒性、可靠性以及智能型一直是基于机器视觉的分拣系统的发展方向,在这个发展方向上还存在许多问题需要我们对其不断的深入研究与完善。
参考文献
[1]黄启明.自动分拣系统及其应用前景分析[J].价值工程,2010,29(32):17-18.
[2]胥磊.机器视觉技术的发展现状与展望[J].设备管理与维修,2016(09):7-9.
[3]刘振宇,李中生,赵雪等.基于机器视觉的工业机器人分拣技术研究[J].制造业自动化,2013,35(17): 25-30.
[4]Juan Yan,Huibin Yang.Research on Workpiece Sorting System Based on Machine Vision Mechanism[J]. Intelligent Control and Automation, 2015, 06(01): 1-9.
[5]Bai He Lang,Ling Yun Shen,Tai Lin Han,Yu Qun Chen.An Adaptive Edge Detection Method Based on Canny Operator[J].Advanced Materials Research,2011,1279(255-260):2037-2041.
[6]孙英慧,蒲东兵.基于拉普拉斯算子的边缘检测研究[J].长春师范学院学报(人文社会科学版),2009,28(12): 4-6.
[7]Chun Yan Nan,Xiao Hui Yang.Spline Interpolation Sub Pixel Edge Detection Method Based on Improved Morphological Gradient[J].Advanced Materials Research,2014,3255(971-973):1756-1759.
[ 8]CHEN HAI-WEN (US).A METHOD AND SYSTEM FOR ADAPTIVE TARGET DETECTION[P]. EP1704510,
[9]李振兴,刘进忙,李松等.一种改进的群目标自适应跟踪算法[J].哈尔滨工业大学学报,2014,46(10):117-123.
[10]Hongqi Wang,Dongmei Du.An Improved Integral Image SURF Algorithm[M].Springer Berlin Heidelberg:2014.
[11]Yuan Min Liu,Lian Fang Tian.An Improved Algorithm on Adaptive KLT Vision Tracking[J].Advanced Materials Research, 2013, 2200(631-632):1270-1275.
[12]Yuan Cong,Xiao Rong Chen,Yi Ting Li.Research on the SIFT Algorithm in Image Matching[J].Applied Mechanics and Materials, 2012, 1498(121-126):4656-4660.
[13]Yu Liu,Hong Chen,Yong Sheng Guo,Wen Bang Sun,Yao Yu Zhang.The Research of Remote Sensing Image Matching Based on the Improved Harris Corner Detection Algorithm[J].Advanced Materials Research,2011, 1290(271-273): 201-204.
[14]王孝艳.基于卡尔曼滤波的动目标视觉跟踪方法研究[D].沈阳理工大学,2012.
[15]李小婷,史健芳.基于重采样技术改进的粒子滤波算法[J].微电子学与计算机,2016,33(09):164-168.
[16]De Li Zhu.Research on Application of Extended Mean-Shift Algorithm in Image Smoothing[J].Applied Mechanics and Materials,2014,2829(457-458):1126-1129.
[17]苏娟,王百合,刘代志.一种基于拓扑约束的多核跟踪算法[J].电子学报,2015,43(02):353-357.
[18]Shi H H,Xiang W.Object Tracking Using Improved Meanshift Algorithm Combined with Kalman Filter on Independent Visual Robotic Fish[J].Applied Mechanics & Materials, 2013, 333-335:1030-1033.
[19]曹春燕,陈元昭,刘东华等.光流法及其在临近预报中的应用[J].气象学报,2015,73(03):471-480.
[20]熊英.基于背景和帧间差分法的运动目标提取[J].计算机时代,2014,(03):38-41.
[21]李志忠.基于背景减除法的运动目标检测算法研究[D].中国民航大学,2015.
[22]D.M.Bramich.A new algorithm for difference image analysis[J]. Monthly Notices of the Royal Astronomical Society:Letters,2008,386(1):L77-L81.
[23]HENRIK EGNELL. Multi target tracking initiation with passive angle measurements[P]: AU6642198,
[24]Daniel Weinland, Remi Ronfard, Edmond Boyer.A survey of vision-based methods for action representation, segmentation and recognition [J].Computer Vision and Image Understanding, 2011,115(2):224-241.
[25]阴国富.基于阈值法的图像分割技术[J].现代电子技术,2007,30(23):107-108.
[26]管慧娟.基于区域的图像分割方法[D].大连理工大学,2006.
[27]刘雨.基于边界特征点提取的网格分割[D].吉林大学,2016.
[28]Min Xiu,Wen Hao.A study on geometrical determination and edge feature extraction for 3D reconstruction using stereo radiography[J].Japanese Journal of Medical Physics,1996,16(3):138-149.
[29]Xupeng Wang,Ferdous Sohel,Mohammed Bennamoun,Yulan Guo,Hang Lei.Scale space clustering evolution for salient region detection on 3D deformable shapes[J].Pattern Recognition,2017,71:414-427.
[30]戈美净,赵俊英,王守志.基于改进Harris-Laplace算子的图像校正研究[J].信息通信,2015,(08):49-51.
[31]Nowak E,Triggs B.Sampling strategies for bag-of-features image classification[C].European Conference on Computer Vision,Austria:Springer-Verlag,2006,3954:490-503.
[32]Moosmann F,Nowak E,Jurie F.Randomized clustering forests for image classification[J].IEEE Transaction on pattern Analysis and Machine Intelligence,2008,30(9):1632-1646.
[33]陈荣,曹永锋,孙洪.基于主动学习和半监督学习的多类图像分类[J].自动化学报,2011,37(8): 954-962.
[34]Hutchinson S,Hager G, Corke P.A tutorial introduction to visual servo control[J].IEEE Trans on Robotics & Automation,1996,12(5):651-670.
[35]Hager G D.A modular system for robust positioning using feedback from stereo vision[ J].IEEE Trans on Robntics & Automation, 1997,13(4):582-595.
[36]MALIS E,CHAUMETTE F,BODET S.2 1/2 D visual servoing[J].IEEE Transactions on Automation,1999, 15(2):238-250.
[37]卢勇威.基于机器视觉的水果分拣系统[J].装备制造技术,2017,(03):163-165+168.
[38]许江淳,岳秋燕,任向阳,王晴.基于机器视觉的药片表面缺陷识别与分拣系统设计[J].传感器与微系统,2017,36(06):90-93.
[39]管经纬.基于机器视觉的工件自动分拣系统研究[D].东华大学,2015.
[40]王延海.基于机器视觉的鸡蛋胚胎成活性检测及分拣系统研究[D].青岛科技大学,2010.






共0条 [查看全部] 网友评论