


Abstract: AGV automatic transport vehicles Is the important equipment for automaitc
retrieving system and Flexible Transfer System. According to the requirement of the
current logistics warehouse and the basic requirements of the existing AGV control
system, a movement chassis based on PLC control and a carriage with lifting function
are set up. The experiment results indicate that the designnot not only on
transportation but also can lift. When the communication module received the signal
from the upper computer. The onboard control module can control the drive module
to up and down. It also has the fuctions of obstacle avoidance and GPS .
Ke words: Intelligent AGVtransport vehicle PLC Transport and lifting Obstacle avoidance
and navigation
【中图分类号】F407.67 【文献标识码】A 文章编号1606-5123(2017)09-0000-00
1 引言
自动引导小车AGV(Automated Guided Vehicle)通常也称为AGV运输车,指装备有电磁或光学等自动导引装置,能够沿规定的导引路线行驶,具有较好的保护和移载功能,能够物流运输自动化中不需驾驶员的实地操作运输车,且充电的蓄电池为其动力来源[1]。在以欧美为代表的工业自动化水平较高的发达国家,AGV运输车已得到了广泛应用,而国内,虽在AGV运输车方面投入较多的资金做研究,但仍然无法满足日益发展的运输需求,具有较大的发展空间[2]。本次设计是专为某公司仓库运输需求设计一款具有运输与升降功能的智能AGV运输车,小车能够在预先设定好的程序控制下,完成一系列的运输、升降等功能,升举式装配型AGV,通过车架中间部升降机构运载及卸载货物,与相关配套设备构建柔性生产线,对于提高物流运输自动化水平,减轻工作人员的劳动强度,提高物流运输效率,缩短物流周期,都具有重要的意义[3]。
2 AGV运输车的结构系统简介
智能AGV运输车主要包括车身、驱动模块、升降模块、导航定位模块、控制模块、电源模块、通讯模块、安全模块等,其中驱动模块和控制模块是AGV运输车的关键部分,他使用面向对象技术,在对多任务工作进行处理时通过各单元的模块化设计完成AGV运输车
的动作控制和导航运算。
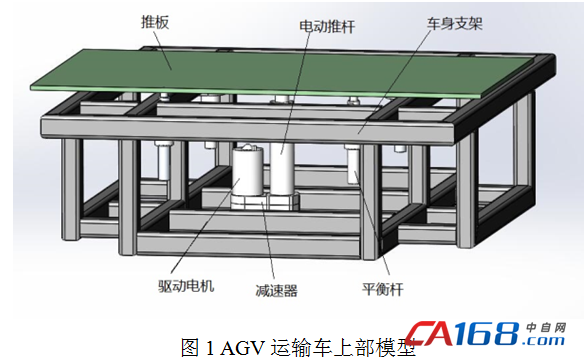
AGV车身结构分为上下两部分,其中上部主要包括AGV车身支架、升降机构,参见图1所示。
AGV车身下部包括车底盘、麦克纳姆轮、伺服电机、减速器、磁传感器、中央控制模块、电池组等部分组成,参见图2所示。

3 AGV车载控制系统设计与实现
3.1 控制模块
AGV运输车的控制模块通常是由上位机控制模块和车载控制模块两个模块构成。AGV运输车的上位机控制系统,主要功能是通过计算机来完成对AGV运输车的运动路线设定和管理,它可以通过无线通信技术将任务信号传递给AGV运输车的车载控制模块,其可以通过的车载控制模块对信号进行分析处理,按照预先设定的任务指令完成一系列动作内容。
本设计中,车载控制模块安装在车底盘上部,它是整个AGV运输车的控制中心,该模块主要作用是车载驱动伺服电机的控制、传感器信号采集处理、AGV运输车的定位算法、驱动器的控制、无线通讯等功能。目前常用的AGV小车的控制系统有PLC控制、单片机控制、DSP芯片控制以及专门为AGV开发的系统控制,鉴于PLC控制的功能性强、数据处理能力快、市场应用率广泛以及维护方便等诸多优点,本设计中的AGV运输车选用PLC控制作为车载控制模块的核心处理器,并选用西门子公司开发的S7-300系列,该控制模块含有16位的输入接口和16位的输出接口,并且拥有三个通道的脉冲调制模块和高速技术模块[4]。PLC控制器通过控制驱动伺服电机,并使用脉冲调制模块控制驱动伺服电机的转向和升降机构的升降,并将信号通过编码器反馈至PLC控制单元的高速技术器,组成一个完整的闭环系统,使其能够顺利的完成AGV运输车的各项动作任务,参见图3所示。

升降模块安装在车身支架上,其包括推板、平衡杆、推杆等部分组成,本设计采用单推杆设计,电动推杆由一台伺服电机、减速器、推杆组成一体化设计,其选用一款北京金达凯诺电动推杆,输入电压24V,最大负载可承受7000N,行程速度可达到5
设计采用单推杆中央驱动,四根直线平衡杆辅助的布置,具有较好的稳定性。
3.3运动模块
底盘为一个
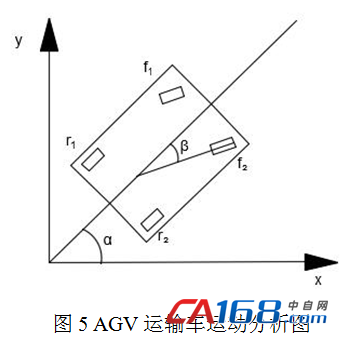
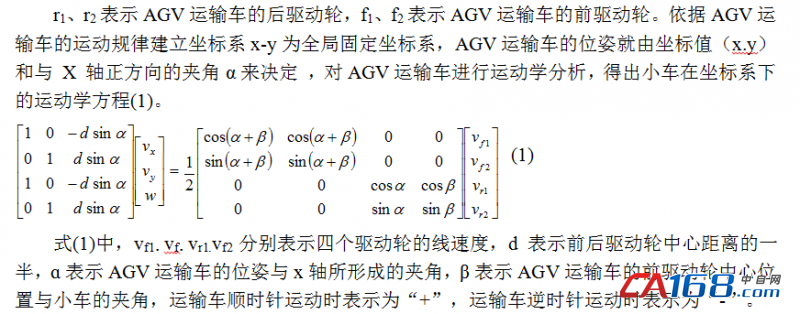
3.4 AGV运输车运动学分析
AGV运输车运动学分析参见如图5所示。
3.5 导航定位模块
在复杂的仓库环境中,要求AGV运输车以较快的速度完成运输任务,就必须要有一个完善的导航定位模块。随着电子技术的迅速发展,AGV运输车的导航定位技术也趋于多元化、精确化。应用较广按的技术有电磁导航、超声导航、激光导航、光学导航、惯性导航等,本次设计中考虑到工厂地面平坦,便于在地面上布置磁导引线,因此选用电磁导引型,作为本设计导航定位的关键技术。
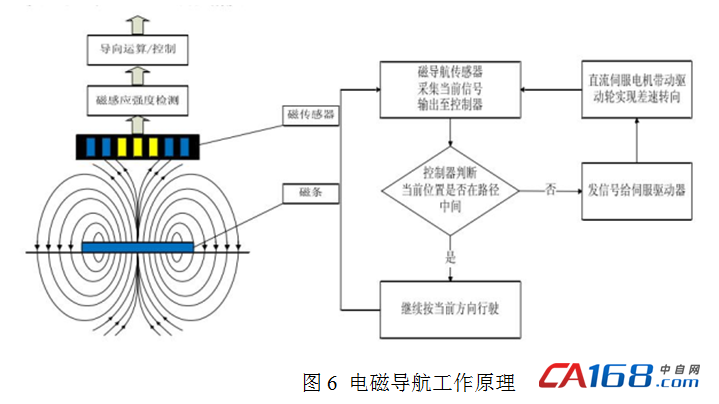
工作原理,依照所需AGV运输车的运行路径,在地面上布置一条引导线带,并将引导线通以5~30kHz的交变电流,这样可以在引导线附近形成沿导线扩展的交变磁场。通过安装2个对称的电磁传感器,利用电磁感应原理,通过检测电磁信号的强度,引导车辆沿埋设的路线行驶[6]。本设计中车底盘安装有电磁传感器,电磁传感器可以通过扫描预先布置在地面上的磁场环境,可以让运输车有明确运输路线,并时时将采集到的磁信号传递给车载控制模块,车载控制模块对接收到的磁信号进行处理,确定车辆位置,并对车辆的驱动模块发出一系列的指令,包括启动、转向、加速、停止等。电磁导航工作原理参见图6所示。
3.6 安全模块
对于AGV运输车的安全性要求,除了结构上有足够的强度外,还要对AGV运输车做好安全防护,避免在运输过程中出现不必要的事故。拥有一套完善的安全模块,既可以有效的提高工作效率,同时也保证了同在一个环境下的工作人员和周围机械设备的安全。因此在本次设计中选用技术较为成熟的超声波防碰撞装置,选用CCF-SR1超声波避障传感器并将其安装在AGV运输车车体前部,运输车在运输工作过程中,超声波防碰撞装置的信号发这装置会时时发出超声波信号,同时信号接收器接收反射回来的信号,并将信号传递给车载控制模块,当感应到前方障碍物会输出开关量信号,系统会根据开关量信号组合代码的不同发出各种指令,对驱动模块做出相应的动作,其包括减速或停止动作以避免AGV运输车与周围物品发生碰撞事故[7]。
3.7 电源模块
电源模块为AGV运输车提供能源,是AGV运输车的“动力源”,由于AGV运输车是一种移动运输设备,因此无法采用220V交流电,因此在本设计中采用蓄电池为其提供电能。电源模块安装在车底盘中间部位,电源模块由电池组及其变压原件组成,其中选用 24V电池组,有两个12V电池串联组成,可以为AGV运输车的驱动伺服电机提供充足的电源,以到达足够的运动速度和升降力度。
3.8 通讯模块
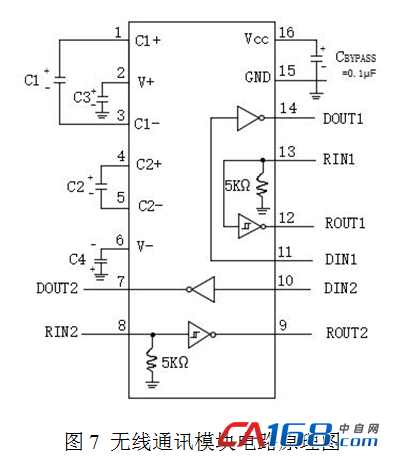
AGV运输车使用过程中,需要经常与上位机控制单元进行交互,所以必须装有与之交互的通讯模块,鉴于仓库环境复杂,所以选用抗干扰效果明显的无线通讯模块,通过在AGV运输车与上位机之间搭建一个虚拟无线局域网络,上位机即可方便的将任务信息时时传递给AGV运输车的车载控制模块,车载控制模块可以对认出信息做出相应处置,将信号命令传递到各负载单元上,AGV运输车同时可以将任务完成情况、位置状态等信息及时反馈到上位机,以便进一步做出任务调整,选用MAX3232EIDR芯片,作为通讯模块,其电路原理参见图7所示。
4 结束语
基于PLC控制的智能AGV运输车,能有在实际应用中对AGV运输车各模块实施有效的控制,在预先设定的路线上安全行驶,配合上AGV的升降模块,使得其在仓库自动化运输中起到关键作用,极大减轻了工作人员工作量。而且通过无线通讯模块把AGV的运行数据实时传递给上位机,更加方便了工作人员对其进行实时监控,AGV运输车在导航定位模块、安全模块的辅助下,使得运载过程安全高效。
参考文献
[1] 暴海宁,宋科,黎原等.激光导引AGV车载控制系统结构及其实现[J].起重运输机械,2016(5):71-73.
[2] 于洋.AGV及其控制器设计与开发[J].浙江大学,2008:6-10.
[3] 张国庆.基于无线传感网络技术的自动化仓库AGV车载通信节点的设计[J].其中运输技术,2009(8):12-14.
[4] 杨文华,王勇.激光导引AGV系统原理及应用[J].机器人技术与应用,2000(3):17-20.
[5] 王伟,胡镇,宋延华等.基于光电传感器AGV差速导向控制方法研究[J].制造业自动化,2013,35(19):1-4.
[6] 刘浩,钟再敏,敬辉等.分布式驱动电动汽车轮边电机传动系统动态特性仿真[J].汽车工程,2014,36( 5) : 597- 607.
[7] 陈积先,张华树,孟辉等.电动汽车用电机及控制器测试系统研制[J].电机与控制应用,2015,42( 9) : 68- 71.
作者简介
李明波 工学学士 研究生在读 研究方向:机械工程方向




共0条 [查看全部] 网友评论