


Abstract: With the rapid development of social economy and the improvement of people's living
standard, the number of motor vehicles is increasing rapidly. The traffic problem has gradually
become the focus of attention. This design mainly aims at the main and the main road intersection
traffic light to carry on the intellectualized design, may according to the traffic flow size changes,
indicated the passage time length. Using AT
can control the red, green and yellow lights to transform time alternately, and added the
countdown function. On this basis, real-time data acquisition of traffic flow is carried out through
sensors, and the collected data is transmitted to the control center through the A/D converter for
comparison and analysis. According to the result of comparison, the length of the control indicator
lamp is controlled, so that the traffic signal lamp can improve the traffic efficiency of the
intersection according to the intelligent regulation of the traffic flow.
Key words:Intelligent traffic Signal light SCM
【中图分类号】U665.16 【文献标识码】A 文章编号1606-5123(2017)09-0000-00
1 引言
近年来随着机动车辆日益普及,城镇道路建设由于历史等原因的相对滞后,人们也越来越受到交通拥堵、交通事故频发等问题所带来的困扰,特别是街道的各十字路口,更成为交通网中通行能力的隘口和交通事故的多发源。为使交通畅通,防止交通阻塞,交通灯在大多数城市得到了广泛的应用。 传统的交通灯控制系统采用的是固定周期控制的方式,这样虽然简单易于控制,但缺点是随着车流量的增多,控制信号往往与实际的交通流量不适应,无法实现实时控制,遇到紧急情况也无法及时处理。
针对上述问题,本论文结合自动检测技术以及控制原理,提出了一种新型的智能交通灯控制系统,在原有的固定时长系统的基础上增加一个车流量检测装置,使之成为一个根据车流量进行实时控制的系统,提高车辆通行能力。
2 系统的功能要求
2.1 工作过程
首先根据传感器检测的信号,把其分为东西方向和南北方向的信号。而每条导向车道上有两组传感器(每组两个),距离停车线较远的传感器检测进入等待区域车的数量,距离停车线近的的传感器驶出等待区域的数量,两者之差便是最后停车等待的数量,比较东西方向与南北方向等待车量的多少,适时延长绿灯时长或缩短绿灯时长。
2.2 设计参数
(1) 本设计主要针对于十字路口的道路交通灯控制系统。设定这个十字路口有两条道路,一条称为主干道,一条称为副干道。本设计要求这两个方向的车辆能够交替运行。同时,也就是最重要的一点,这两个方向可以通过分析车辆滞留量的大小自动调节车辆通行时间。显而易见的是,当主干道车流量大的时候,主干道交通灯绿灯时间需要更久;而当副干道的车流量大的时候,主干道交通灯红灯时间要更长。在本次设计中,要求主干道通行时间为30s,另外,副干道通行时间为15s。
(2)每当绿灯时间结束后,交通灯红灯不能直接亮,其间需要亮黄灯5s。
(3)每个方向除了黄绿红灯以外,还要为这个自适应交通灯控制系统配备两组倒计时显示器。在这次设计中,显示器采用数码管显示器。
3 硬件设计
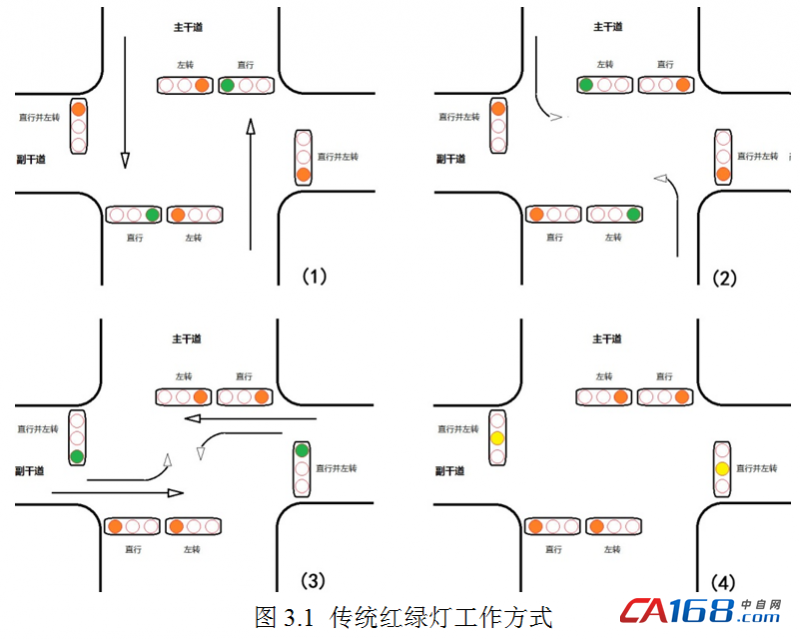
3.1 信号灯指示方式的改进
在十字路口,分为主干道(南北方向)和副干道(东西)。通常情况,以及从日常过马路的经验判断,首先是一个方向通行,另一个方向不能通行。当这个方向的绿灯计时结束时,黄灯要先亮5秒钟(或更少),然后对换通行方向。按照这样的一个周期周而复始。
3.2 车流量传感器的布局和统计方式
传感器的布局方式如图3.3所示。
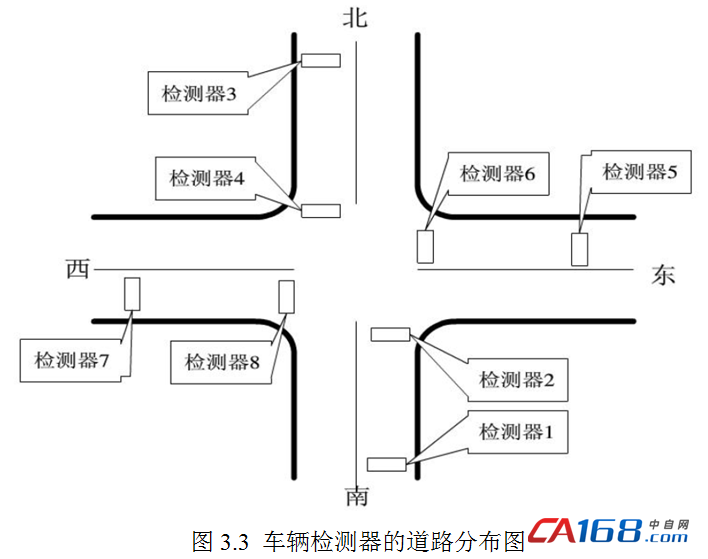
当车辆到达十字路口的时候,车辆会被传感器1和传感器3检测到已经进入该区域(南北方向十字路口),检测器就会发送两个脉冲给单片机AT89C51。单片机对检测器1和检测器3的计数就可以得到进入候车路口的总和X。车辆继续前行的话,检测器2 和检测器4 就可以检测到有多少车辆已经驶出了该方向路口。单片机对检测器2 和检测器4 的计数就可以得到驶出该候车路口的总和Y。这样我们就可以得到在这一时间滞留在该方向路口的车辆数Z1(南北方向滞留数)=X (南北驶入量)-Y(南北驶出量)。在上面的那种计算方法下,完全可以采用一样的手段方法来计算出东西方向的车流量。把东西方向的车辆滞留数设为Z2。如果出现这种情况,-20<=Z1-Z2<=20,那么就当其为一般情况,交通灯控制系统的交通灯正常闪亮。在这种情况下,主干道绿灯亮的时间为30s,黄灯亮5s,副干道红灯亮的时长为70s。另外,主干道禁行副干道通行时,副干道绿灯亮的时间为15s,黄灯亮5s, 主干道红灯亮的时长为40s。
(1)设Zl-Z2>20,则十字路口主干道繁忙,副干道一般,主干道绿灯时长加10s,副干道红灯时长加l0s。
(2)设Zl-Z2<-20,则十字路口副干道繁忙,主干道一般,副干道绿灯时长加10s,干
道红灯时长加10s。
交通灯的亮灭方案参见表3.1所示。
表3.1 交通灯亮灭方案(其中,T1、T2、T3、T4分别由上述情况决定)
|
|
T1s |
5s |
T2s |
5s |
T3s |
5s |
T4s |
5s |
|
主干道北 |
绿灯 |
黄灯 |
红灯 |
红灯 |
红灯 |
红灯 |
红灯 |
红灯 |
|
主干道南 |
红灯 |
红灯 |
绿灯 |
黄灯 |
红灯 |
红灯 |
红灯 |
红灯 |
|
副干道西 |
红灯 |
红灯 |
红灯 |
红灯 |
绿灯 |
黄灯 |
红灯 |
红灯 |
|
副干道东 |
红灯 |
红灯 |
红灯 |
红灯 |
红灯 |
红灯 |
绿灯 |
黄灯 |
以上车辆的计数和车流量的比较及绿灯时间长度控制全部由单片机完成。在某一个时刻,路口的各组检测器都需要检测该处的车辆数。在一个完整的周期里面,都需要红灯绿灯黄灯的参与。此时,单片机要根据各组检测器的统计通过一定的简单算法来判断主副干道的车辆滞留亮规模。然后根据以上简述的智能控制原则,调整绿灯时长。
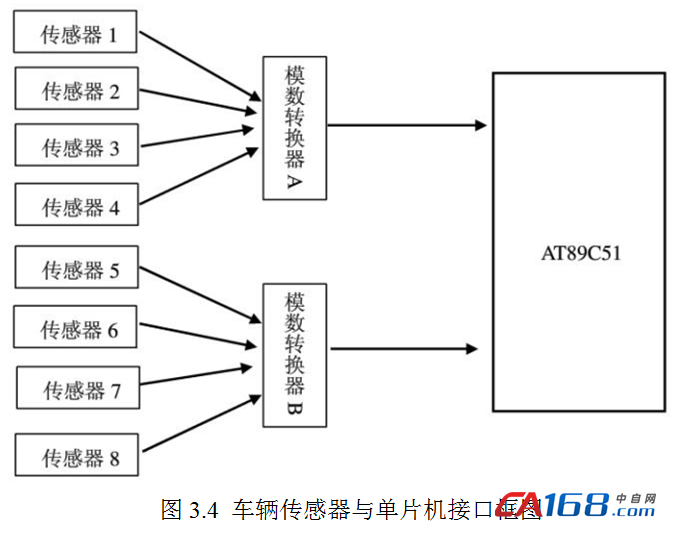
3.3 车流量传感器与单片机的连接
主副干道每个方向各有四个传感器(图3.3),每个方向的四个线圈传感器都需要集中处理成一个信号(单一的数字信号),然后再与单片机的P2口相连接。图3.4是车辆传感器与单片机的接口框图。
4 电路实现
在整个系统电路中包括最小系统电路,紧急按键电路,显示电路。紧急按键电路的主要是针对紧急情况的应急使用。本设计采用单按键操作,根据按键次数,路灯显示不同的颜色。其显示颜色与按键次数对照表如表4.1所示,电路原理图如图4.1a和图4.1b所示,退出紧急状态可按系统复位按键。
表4.1 路灯颜色显示与按键次数对照表
|
按键次数 |
路灯显示 |
|
1 |
全红灯 |
|
2 |
全黄灯 |
|
3 |
南北绿灯,东西红灯 |
|
4 |
南北红灯,东西绿灯 |
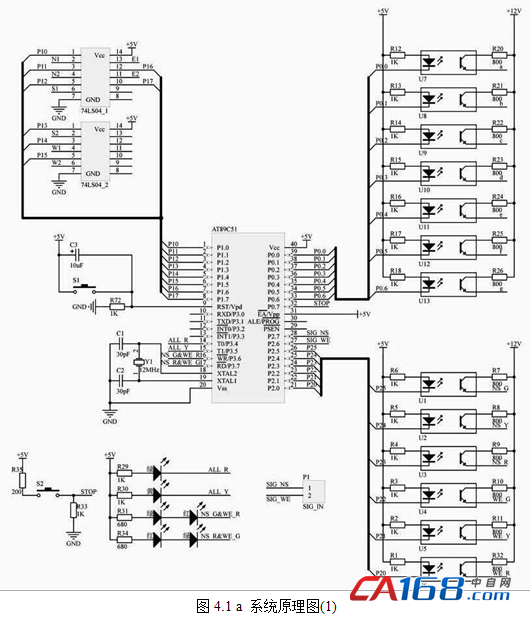
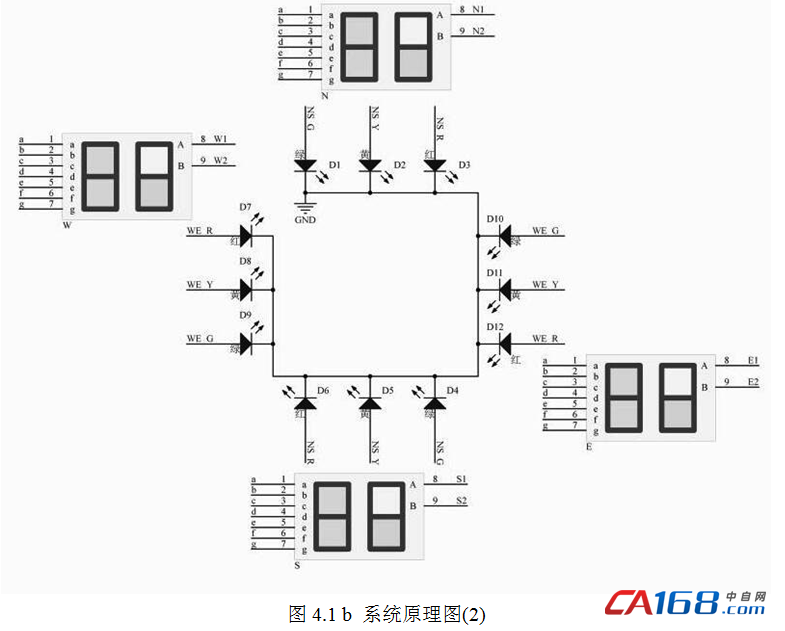
显示电路包括指示灯电路和倒计时灯电路,在一个十字路口,每个方向需要一组灯来运行。每组灯都是有三个灯构成的,分别是红灯绿灯和黄灯。这样的话总共有12只灯,红绿黄灯分别是4只。显示电路利用了7段数码显示管。LED数码管的g~a、dp 8个发光二极管因加正电压而发光,不同亮暗的组合就形成不同的字形,这种组合称为字形码。显然共阳极和共阴极的字形码是不同的,其字形码见表4.2所示。
表4.2 段码表
|
数字 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
代码 |
共阴极 |
|
06 |
5B |
|
66 |
6D |
7D |
07 |
|
|
|
共阳极 |
C0 |
F9 |
A4 |
B0 |
99 |
92 |
82 |
F8 |
80 |
90 |
|
5 控制系统的软件设计
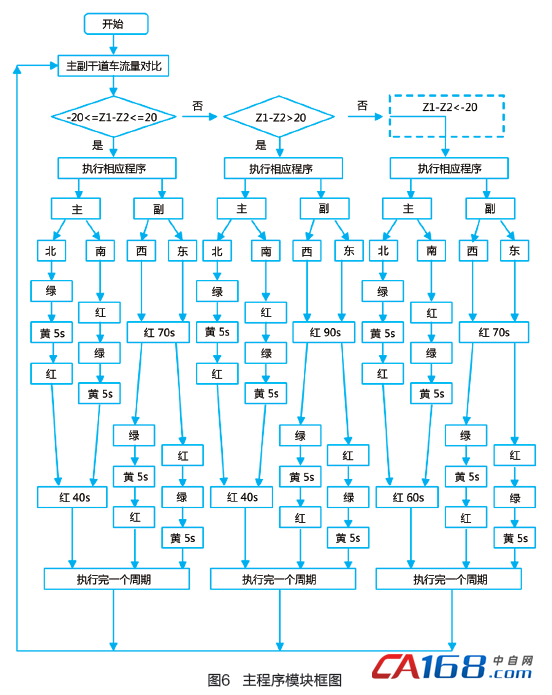
5.1 主程序控制流程
本程序主要是通过一定的程序算法,从主副干道车辆滞留量的高低自动调节主副干道的红绿灯通行时间长短。这里把从主干道绿灯通行到副干道绿灯通行这一时间段称为一个周期。一个周期中主副干道红绿灯亮的情况如表5.1所示。
表5.1 主副干道亮灯一个周期
|
主干道 |
绿灯亮 |
黄灯亮 |
红灯亮 |
|
|
副干道 |
红灯亮 |
绿灯亮 |
黄灯亮 |
|
5.2 控制程序设计
主程序模块接收车流量信号并进行分析,然后控制着亮灯的顺序以及时长,本程序按周期循环设计,其框图如图5.1所示。
6 结束语
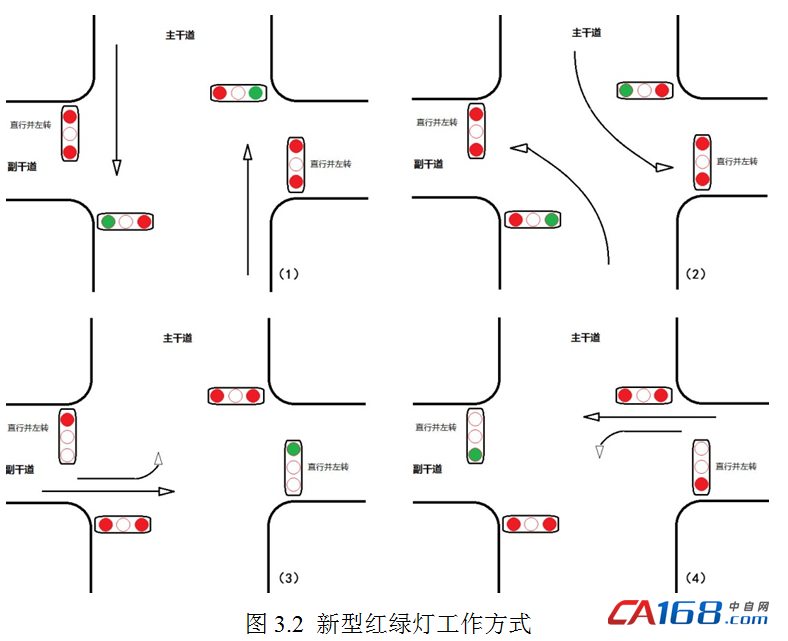
十字路口的疏导问题是城市的发展的一个重要环节,也是保障居民出行安全的一个基本环节。本设计以现有智能交通灯理论为基础,突破传统思路,使问题简化。简化了系统结构,降低经济成本。创新性的提出了车辆对向分离行驶方案,可在多种路口使用,有效的提高车辆通行率。与传统的交通信号机相比,本设计有很强的控制能力以及良好的控制接口,并且安装灵活,设置方便,模块化、结构化的设计具有良好的可扩展性,系统运行安全、稳定、效率高。
参考文献
[1]刘天浩.基于单片机的交通灯控制系统研究[J],实验室科学,2012(32):23-56.
[2]田宇.基于模糊原理的城市交通灯控制方法的研究[J],北京航天工业学院学报,2010,3(20):1673-1690.
[3]陈君.基于AT89S51单片机的智能交通灯设计[J].电子技术与软件工.程,2016,(01):260-261.
[4]徐鑫,杨利亚,周磊等.单片机智能交通灯控制系统的设计[J].电子世界,2013,(23):23-24.
[5]陆海全,李志军,闫非凡等.基于单片机的智能交通灯控制系统[J].电子技术与软件工程,2016,(03):51-53.
[6]孟祥雨.基于单片机的智能交通控制系统设计[J].信息与电脑(理论版),2015,(09):8-9.
作者简介
刘南南 (1993- ) 女 工学学士 研究生 研究方向:先进设计与制造技术方向




共0条 [查看全部] 网友评论