



1 引言
目前国内外机器人发展迅速,各类机器人产品正大量的应用于工业生产中,作为机器人最为关键的几个技术指标的位姿、距离和轨迹的准确度和重复性。而这几项性能指标又以位姿的准确度和重复性为重,机器人的位姿准确度性能的好坏将直接影响到距离和位姿的准确度和重复性。鉴于以上情况及公司发展机器人产业的需求,特提出研发机器人位姿准确度和定位重复性测试设备。[7,8]

2 机器人测试项目
依照国家标准GB12642工业机器人性能规范及其试验方法以及国际标准ISO9283所规定和定义的工业机器人重要的性能指标[5,6],具体测试项目见表1所示。
表1 工业机器人测试项目表
|
序号 |
检测项目 |
循环次数 |
备注 |
|
1 |
位姿准确度和位置重复性 |
30 |
|
|
2 |
多方向位姿准确度变动 |
30 |
|
|
3 |
距离准确度和距离重复性 |
30 |
|
|
4 |
轨迹准确度和轨迹重复性 |
10 |
|
|
5 |
重复定向轨迹准确度 |
10 |
|
3 设计原理
采用3个品牌为基恩士的高精度接触式测距传感器对进入测试区域的标准测试球进行接触测试,计算出标准测试球的球心坐标,通过多次测试的坐标位置变化计算出被测机器人的定位准确度和重复性。
具体操作步骤如下:
第一步:将标准测试球安装到机器人末端进行点位示教,将测试点落在测试设备的3个传感器的测试区域内。
第二步:任意设置机器人非测试点位作为机器人测试时的运动点。
第三步:首次将测试球升入测试设备中,设备传感器分别取出当前变形量,软件自动将各轴当前的变形量作为设备初始测量球的心点位置,系统软件部分接收并将此点记录为机器人此次测试的标准位置。
第四步:连续测试30次,并将每次的测试数据记录下来,与首次测试所得标准位置之间的空间距离相对差值,得出每次测试球的心点变化量。
第五步:系统软件部分将接收所有测试数据根据国标工业机器人性能规范及其试验方法中位姿准确度和重复性计算公式计算出被测机器人的位置准确度和重复性。
4 结构设计
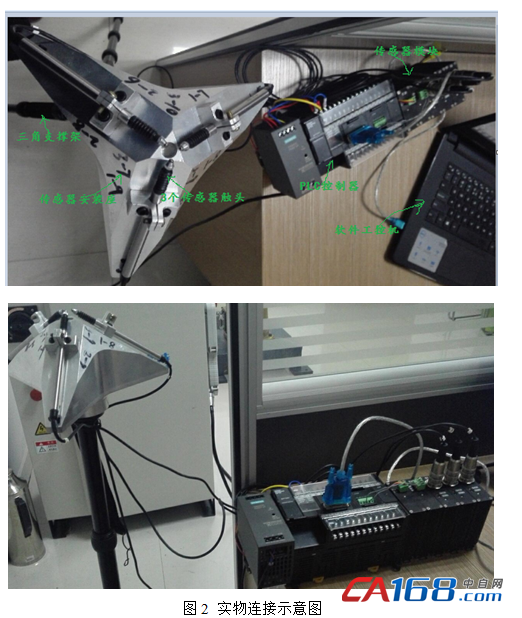
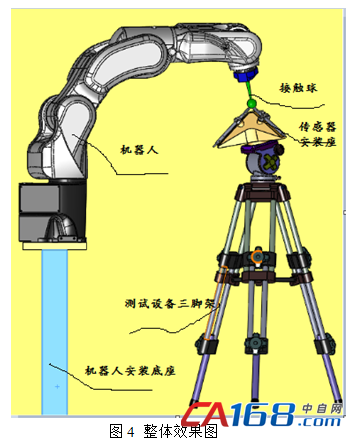
测试设备主体,包括用于测量的三个接触式笔形传感器,接触式笔形传感器选用基恩士品牌,分别安装在三角形状的铝件上面,如下实物图2所示,传感器信号处理模块、通讯模块也同样选用基恩士品牌,三个接触式传感器的轴线通过一固定框相交于一点,三个接触式传感器通过传感器信号处理模块与通讯模块连接,通讯模块与计算机连接,接触式传感器通过专用线缆与传感器信号处理模块连接、传感器信号处理模块与通讯模块通过模块上预留的对接插口连接,通讯模块通过标准RS-232通讯电缆与计算机连接。具体配置如表2所示,结构本体如上所述,被测标准钢球由机器人携带在传感器轴线交点处进入,根据机器人多次的重复进入定位点有差异,通过传感器的输出可测得球心的位置变化,各结构图如图3~图4所示。


4 软件设计及测试曲线
首先开启系统,进行程序初始化,初始化完成后,开启通讯,接收传感器数据,对传感器数据进行解码运算,根据运算结果,对数据进行处理,处理后的结果通过曲线的形式显示,同步计算重复精度,一般对采集到31次的数据进行处理,可以得到测试精度,测试完成,若得不到测试结果,重新采集数据,按上述流程重新运算,得到测试设备到精度。具体流程图如图5所示,测试界面及显示曲线如图6-图7所示。






共0条 [查看全部] 网友评论