
1 引言
目前,国内外机器人发展迅速,各类机器人产品正大量应用于工业生产中,其中AGV即:Automated Guided Vehicle ,是自动导引运输车这一轮式移动机器人在工业生产自动化的自动物料转运过程从有着举足轻重的作用[1]。
当前最常见的应用如:AGV搬运机器人或AGV小车,主要功用集中在自动物流搬转运,AGV搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导;目前最先进扩展性最强是由米克力美科技开发的超高频RFID引导[8-9]。
磁条引导的方式是常用也是成本最低的方式,但是站点设置有一定的局限性以及对场地装修风格有一定影响;激光引导成本最高,对场地要求也比较高,所以一般不采用;RFID引导成本适中,其优点是引导精度高,站点设置更方便,可满足最复杂的站点布局,对场所整体装修环境无影响,其次RFID高安全性稳定性也是磁条导航和激光导航方式不具备的[2-4]。
对于现在高速发展的自动化生产,AGV机器人的运行速度已赶不上生产线的物料转运效率需求,复杂的应用和高额的售价也已无法满足客户需求[5-7]。
针对目前市面上AGV机器人存在的一些不足,本设计提出一种高速无线导航AGV机器人。采用一种高精度低价位的UWB无线导航技术实现AGV机器人高精度无线导航,大尺寸驱动轮和大功率高精度伺服电机实现AGV机器人高速大负载运行,最高时速可达30km/小时。
2 总体设计方案
采用一种高精度低价位的UWB无线导航技术实现AGV机器人高精度无线导航,大尺寸驱动轮和大功率高精度伺服电机实现AGV机器人高速大负载运行,最高时速可达30km/小时。
2.1 设计原则
采用UWB超宽带这种高精度低成本的无线定位技术来实现AGV机器人高精度无线导航。AGV机器人车体借鉴电动车的车体结构设计,通过调整驱动轮的尺寸和驱动电机功率,调高AGV机器人的运行速度,进而调整AGV机器人运行效率。
本设计产品使用方便,易于操作,同时导航定位准确度高,运行速度搞,其具有显著效果和良好作用。
2.2 结构设计
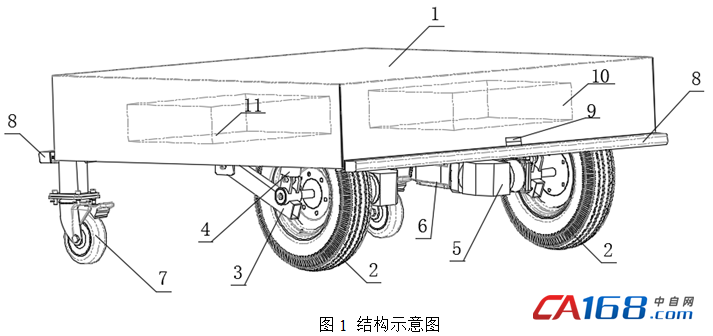
高速AGV机器人主体包含以下部分:1、车架;2、主动轮;3、主动轮支架;4、主动轮减震器;5、减速机;6、伺服电机;7、万向从动轮;8、碰撞传感器;9、障碍物扫描激光传感器;10、无线导航控制器;11、动力电池组。结构示意图如下图1所示:
车架为高速AGV机器人的承载主体,使用过程中被转运物体放于车架顶部平台上,
主动轮通过主动轮支架与车架连接,对车体起到支撑作用并为车体的运行提供动力。主动轮上方安装主动轮减震器减小货物在运输过程中对主动轮轴的载荷冲击。
万向从动轮安装于车架后侧,对车体起到支撑作用。
伺服电机和减速机同轴连接,安装在主动轮支架上,通过联轴器与主动轮轴连接为主动轮提供驱动动力。
动力电池组为高速无线导航AGV机器人提供电能。
障碍物扫描激光传感器用于提前感知机器人运行路线前方存在的障碍物,提醒控制系统进行躲避障碍物处理。
碰撞传感器用于感知机器人与障碍物间的碰撞检测,碰撞传感器如有碰撞感会立刻切断伺服电机的输出,控制高速无线导航AGV机器人停车,以避免意外发生。
无线导航控制器主要负责高速无线导航AGV机器人的路径规划,伺服电机驱动控制,传感器信号检测处理以及相关的功能实现。
2.3 无线导航的工作原理
本设计产品采用UWB无载波通信技术进行无线导航控制。UWB(Ultra Wideband)又名超宽带是一种无载波通信技术,利用纳秒至微微秒级的非正弦波窄脉冲传输数据。有人称它为无线电领域的一次革命性进展,认为它将成为未来短距离无线通信的主流技术。
总的来说,UWB在早期被用来应用在近距离高速数据传输,近年来国外开始利用其亚纳秒级超窄脉冲来做近距离精确室内定位。我们采用UWB特有的“接收信号强度定位法”和“到达时间定位法”共同实现高速无线导航AGV机器人的导航控制。
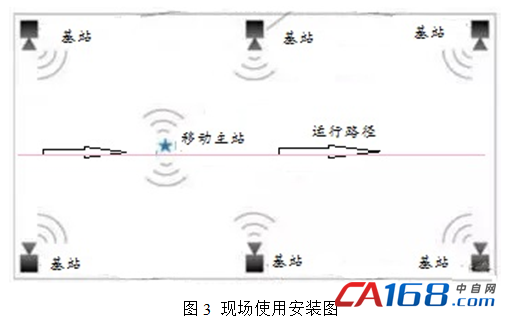
无线导航方式如下图2所示,位于图中间的信号源为车载UBW主站,四周等间隔分布的四个信号源为固定基站,主站随高速无线导航AGV机器人移动,基站按固定间距和位置固定安装在高速无线导航AGV机器人运行路线的两侧,基站之间的相对位置固定且不超过10米,基站相对于主站的安装的高度也是固定的。通过UWB特有的“接收信号强度定位法”和“到达时间定位法”可计算出搭载主站所的高速无线导航AGV机器人与各基站之间的空间直线距离。通过以上数据可以根据空间几何方法计算出高速无线导航AGV机器人当前所在空间位置的坐标,从而实现高速无线导航AGV机器人的无线导航定位。
 、
、
2.3.1 接收信号强度定位法
接收信号强度定位法是通过信号强度和已知信号衰弱模型来估计接收点与待测点的距离,根据多个接收点距离待测点的距离值画出圆,多个圆的重叠部分就是待测物体。
在移动装置中,接收信号强度常用接收信号强度指标RSSI来表示,在理想环境中这种方式可以获得较为精确的定位。
然而RSSI受信号反射、散射、绕射等多重路径衰减与遮挡影响非常严重,实际上存在较大误差。
2.3.2 到达时间定位法
到达时间定位法和接收信号强度定位法类似,只不过计算接收点和测量点之间的距离是采用无线信号传播时间乘以无线信号传输速度。
由于无线信号传播速度是30W km/S。这就要求待测点和多个接收点之间要有非常精确的时间同步。然后高精度时间获取成本非常昂贵,即使微秒级的时间误差也会造成数百米的距离误差。因此在短距离定位上误差较大。
2.3.3 使用过程
具体使用过程如下:
(1)安装固定基站:如图3所示将基站按照图上样式等间距固定安装在为高速无线导航AGV机器人。
(2)在规划好的物料转运路径上选取各个工作位置点,将带有移动主站的高速无线导航AGV机器人移动到这些位置点,通过无线导航定位设备对这些位置点进行定位标定记录。路径导航规划系统将这些点按照高速无线导航AGV机器人运行要去用直线和转角对路径进行规划,将这些定位点连接在一起。
(3)以上两部完成的是高速无线导航AGV机器人的路径规划和标定工作。如有新的工作路径要求,需要重新执行1、2两步操作。
(4)之后高速无线导航AGV机器人就可以和常规的AGV自动导航车一样,按照规划好的路径进行重复的物料转运工作。
4 结束语
测试结果及实际使用表明,通过采用UWB超宽带这种高精度低成本的无线定位技术来实现AGV机器人高精度无线导航。实现高度柔性化作业。该设备具有操作方便、适用范围广、经济实用等特点,促进各行各业自动化生产进步,作为目前最柔性的自动化运输设备就有着广阔的市场。

参考文献
[I]张正义.AGV技术发展综述[J],物流技术与应用,2005,7.
[2]陈顺平,梅德庆,陈子辰.激光导航AGV的自动引导设计[J],工程设计学报,2003(5).
[3]朱从民,黄玉美,上官望义,马斌良.AGV多传感器导航系统研究[J],仪器仪表学报,2008.
[4]史恩秀,黄玉美.自主导航小车AGV定位方法的研究[J]传感技术学报,2007第1期.
[5]张辰贝西,黄志球.自动导航车(AGV)发展综述[J].中国制造业信息化:学术版.2010第l期.
[6]吴玉月,冯能莲,王继先.基于视觉的AGV自动运输车道路识别技术研究[J],机械制造,2010.
[7]方庆瑁,黄建中.基于环境地图的AGV路径规划免疫网络算法研究,起重运输机械,2010.
[8]N.Nilsson.An application of artificial intelligences,Journal of UCAI,1969,2(3):23-26
[9]Giralt Getal.Amulti-level planning and navigation system for a mobile robot:A first approach to HALRE.In:Proc 6th int Joint Conf. Artificial Intelligengt,Tokyo,Japan,1979:335-337
作者简介
苏渊博 (1984-) 男 硕士学位 工程师 研究方向:工业机器人




共0条 [查看全部] 网友评论