



1 引言
直流电机由于具有速度控制容易,启、制动性能良好[1],且在宽范围内平滑调速等特点而在冶金、机械制造、 轻工等工业部门中得到广泛应用。因此,对直流电机的速度控制方法进行研究仍然有必要[2]。采用虚拟仪器技术构建测试仪器,不仅测试精度、稳定性和可靠性高,而且开发效率高,可维护性强,有很高的性价比,节省投资,利于设备更新和功能的转换与补充[3]。因此,虚拟仪器在生产过程控制中和产品性能测试,设备故障诊断都得到广泛的应用,其研究的意义非常重大。
2 硬件系统的设计
本论文研究的直流电机速度控制系统的硬件系统如图1所示,包括PC机,NI ELVIS 平台工作站和原型实验板。其中实验板上的器件包括1k 电阻、10k 电阻、红外线发光二极管(IR LED)、直流(DC)小电机。其中两个电阻是为了分压的作用,10k 电阻更是作为考察的对象,红外线发光二极管是一对发射红外线和接受红外线的器件,万用表等测量工具。硬件系统实现了功能:通过计算机运行程序,启动数据采集卡,从ELVIS工作平台上采集到模拟数据,然后进行采样,量化,输送到计算机程序界面上,之后程序根据实际情况与需要达到的目的进行比较,发出控制信号,传输到ELVIS 工作平台上,从而实现了速度控制。
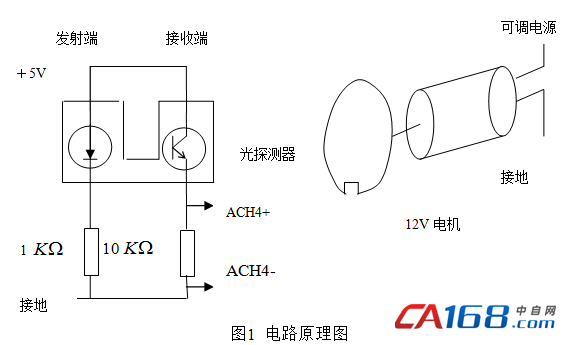
工作原理:当光线被挡住时,传感器接收边接收不到光信号,使右边形成短路,![]() 电阻上电压为低电平,当光线不被挡住时,传感器接收边接收到光信号,使右边形成通路,
电阻上电压为低电平,当光线不被挡住时,传感器接收边接收到光信号,使右边形成通路,![]() 电阻上输出高电平。右边是电机,转轴上安装一个突出薄板,薄板随电机转轴仪器旋转,没转一圈就挡住光电传感器的光线,使传感器输出一个脉冲。这样电机每转一圈,就会产生一个脉冲信号给PC机上的数据采集卡,通过数据采集,利用LabVIEW强大的子VI库中的Pulse Measurements vi,测试脉冲持续时间或波形的周期。
电阻上输出高电平。右边是电机,转轴上安装一个突出薄板,薄板随电机转轴仪器旋转,没转一圈就挡住光电传感器的光线,使传感器输出一个脉冲。这样电机每转一圈,就会产生一个脉冲信号给PC机上的数据采集卡,通过数据采集,利用LabVIEW强大的子VI库中的Pulse Measurements vi,测试脉冲持续时间或波形的周期。
3 控制系统的软件设计
直流电机速度控制系统的软件系统设计包括LabVIEW的前面板设计和框图设计,前面板提供了可视化的控制界面,框图提供了详细的程序控制过程,下面是程序设计的结果。
3.1 控制系统前面板程序设计
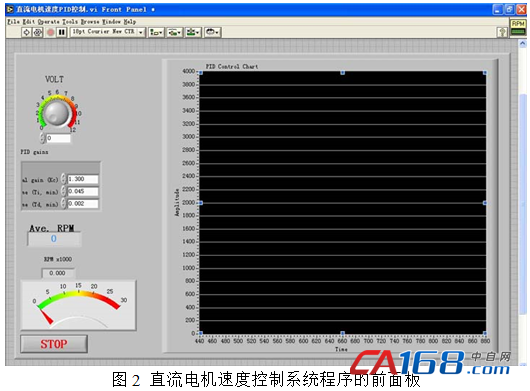
图2为直流电动机速度控制系统前面板的设计。实现的功能:通过在前面板设置PID控制系数以及电压,启动运行,然后通过框图的各部分功能的实现,从而得到了实时的速度图形,以及过程速度变化情况。
3.2 控制系统控制程序框图
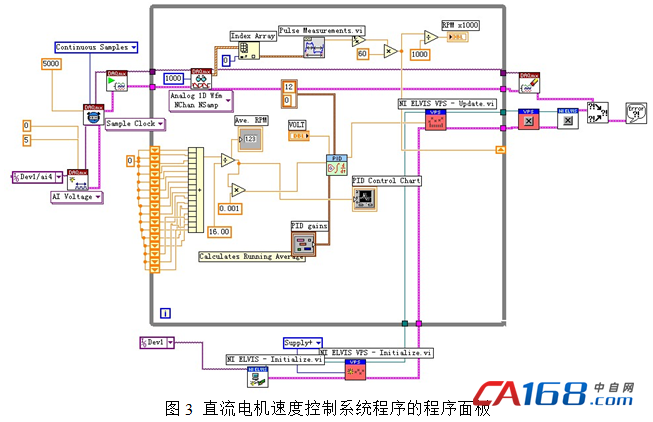
图3为直流电机速度控制系统后置板的流程框图。实现的功能:通过接受控制电压和PID 系数后,采集电机的转速,与预期值进行比较,从而超前性的输出控制电压,控制电机的转速。
4 PID控制器的设计
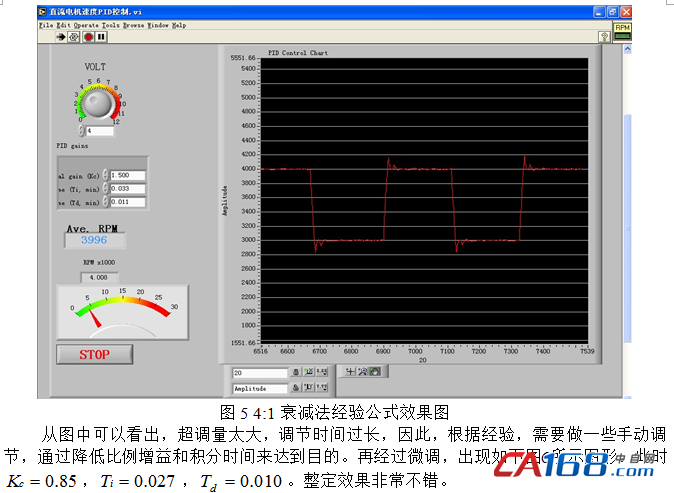
由于直流电机速度控制中,很难调到等幅振荡状态,因此,针对本次控制系统设计,采用4:1衰减法进行整定实验。
4.1 4:1衰减法
4:1衰减法的基本原理是先把积分时间放到最大,微分时间放到零。待调节系统稳定后,逐步增大比例增益,观察输出电压(电流)和调节过程的波动情况, 直到出现4:1衰减过程为止[4]。记录4:1 比例增益![]() 和操作周期
和操作周期![]() ,根据表1所列的经验公式,求得调节器各个参数的具体数值,然后把三个参数加到控制器上进行控制。观察调节过程, 如发现记录曲线不理想,可进行少量调整。
,根据表1所列的经验公式,求得调节器各个参数的具体数值,然后把三个参数加到控制器上进行控制。观察调节过程, 如发现记录曲线不理想,可进行少量调整。
(1)按纯比例系统整定:比例增益![]() ,调节器
,调节器![]() ,
,![]() ,待系统稳定后,逐步增大比例增益,直到出现4:1的衰减曲线,假设此时的调节器比例增益为
,待系统稳定后,逐步增大比例增益,直到出现4:1的衰减曲线,假设此时的调节器比例增益为![]() ,振荡周期为
,振荡周期为![]() 。
。
(2)按表1经验公式, 计算![]() 、
、![]() 、
、![]() 数值.
数值.
(3)整定![]() 、
、![]() 、
、![]() 参数,观察调节过程曲线,曲线不理想时,可适当进行调整。
参数,观察调节过程曲线,曲线不理想时,可适当进行调整。
表1 4:1衰减法经验公式[5]
|
衰减率 |
调节规律 |
|
|
|
|
4:1 |
P |
|
|
|
|
PI |
|
0.5 |
|
|
|
PID |
|
0.3 |
0.1 |
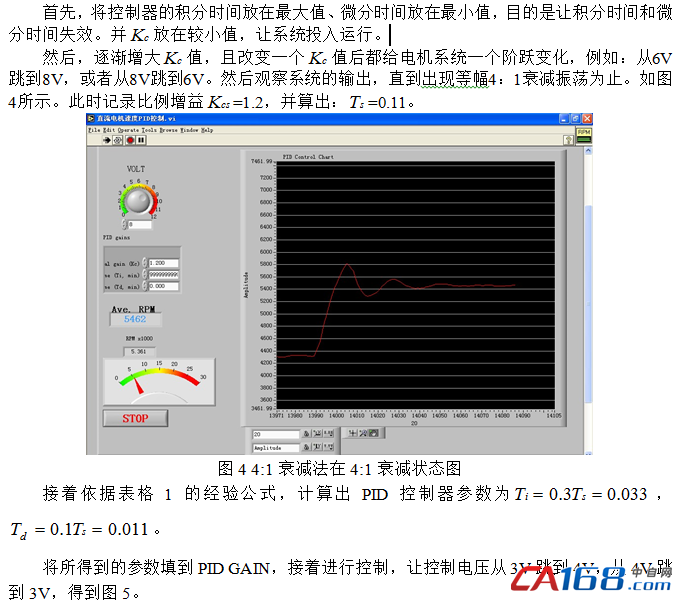
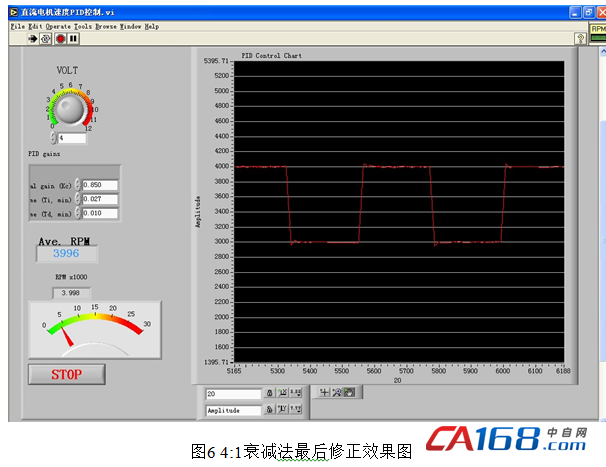
4.2 4:1衰减法的在线实时控制过程
按照上面所讨论的整定步骤进行整定:
5 结束语
通过研究直流电机的结构,建立控制模型,然后设计出PID控制器,最后较好的对直流电机速度进行控制。本文所研究的控制方法对于其他类似控制,乃至工业锅炉控制等也有着积极地意义。
参考文献
[1] 蒋达,梁庆辉,蒋清丰.无刷直流电机PWM调速控制系统的建模与仿真[J].数字技术与应用,2012 (2):144-148.
[2]岳学磊,白鹏,杨瑞坤,华伟民,三相8极无刷直流电机控制系统设计[J].电子技术应用,2016(4):114-118.
[3]李亚康,谢志远,聂盛阳.毕亭亭.基于虚拟仪器的分布式直流电机PID控制系统设计[J].河北大学学报(自然科学版),2015(4):58-62.
[4]杨世勇,徐国林.模糊控制与PID控制的对比及其复合控制[J].自动化技术与应用,2011(11):102-106.
[5]刘慧博,王静.吴彦合.无刷直流电机模糊自适应PID控制研究与仿真[J].控制工程,2014(4):31-33.






共0条 [查看全部] 网友评论