



Abstract: In the traditional manual handling work time-consuming, safety problems, based on the design of the
manipulator control system MCGS configuration software, and using PLC programmable control, the configuration
software and the controller is connected with the host computer, to achieve real-time communication between
configuration software and PLC, PC can display real-time running state manipulator, by setting the upper computer,
can realize remote operation of Web. The system can effectively improve the work efficiency, reduce labor intensity
and increase the safety of the work.
Key words: PLC MCGS Manipulator Configuration Amonitor
【中图分类号】TP271 【文献标识码】B 文章编号1606-5123(2017)11-0000-00
1引言
机械手具有较强的灵活性,运行平稳,操作简单,能够适应特殊场合的特殊生产,广泛应用于工业、农业、食品加工业等领域[2]。但是通常意义的机械手存在着可视效果差和动作单一的问题,不能进行远程操控与监视。运用基于PLC的搬运机械手能有效提高生产速率,减轻劳动者的劳动强度。在此基础上,通过上位机连接到可远程控制的MCGS组态软件,可增加系统的安全性,提高可视效果,降低损耗,提高生产
效率[2]。
本文提出了一种基于MCGS组态软件的搬运机械手控制系统设计方案,搬运机械手可垂直升降、水平移动、180°自由水平旋转,运用PLC进行机械手的可编程控制,并连接MCGS组态软件,将机械手的运行状态以动画的形式显示在上位机屏幕上,对机械手的运行情况进行实时监控。将上位机连接网络,并设置上位机的网络设置,即可进行远程Web操作和监视,将生产自动化与网络接轨。
2 机械手作业流程分析
机械手的工作顺序分为十个步骤,如图1所示。
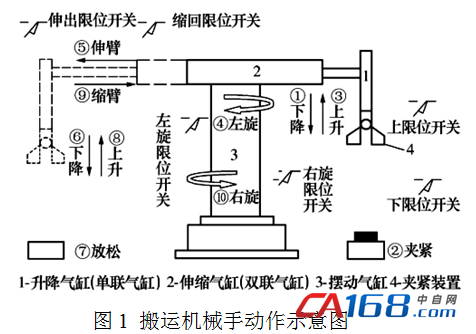
搬运机械手的动作是将右边工作台上的工件搬运到左边的工作台,循环运动,达到持续工作的目的。图1所示的机械手案例通过3个双线圈二位电磁阀,分别控制机械手手臂的升降,机械手手臂的伸缩,
机械手的左右旋转。一个单线圈二位电磁阀控制机械手手爪的夹紧与放松,线圈断电时,执行放松的动作,线圈通电时,执行夹紧的动作。在机械手的各个极限位置都设置了限位开关,对机械手的升降、伸缩、左右旋转进行动作限位,并发出动作到位的输入信号。机械手有循环动作、单周期运行、步进运行、单步运行4种工作方式。
在循环运行下,机械手按照设定好的动作进行工作。启动系统之后,机械手臂下降→手爪夹紧工件→手臂上升→手臂左转→手臂伸出→手臂下降→手爪松开工件→手臂上升→手臂缩回→手臂右转→回到原点等待命令。机械手臂伸缩、升降、左右旋转、手爪夹紧都有传感器判断其到位情况,只有传感器检测动作到位后,方能进行下一个动作。
3 PLC硬件设计
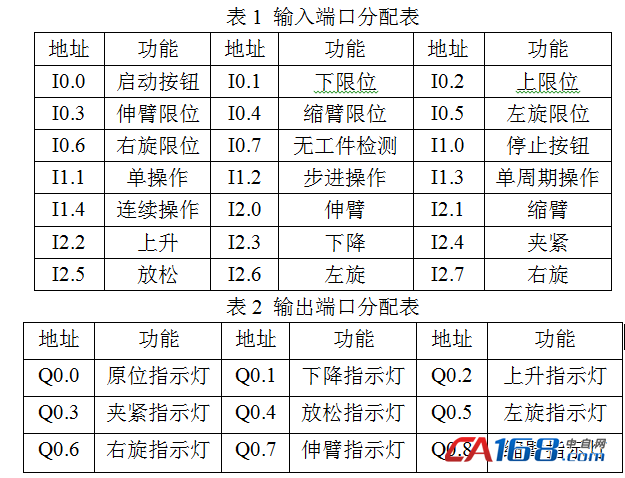
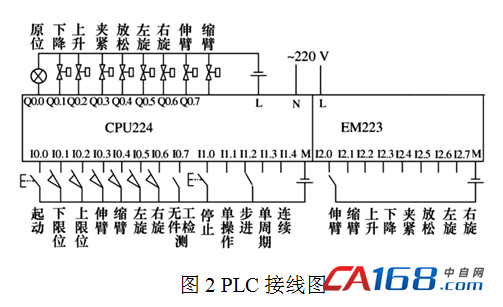
分析本搬运机械手的运动,其控制系统较简单,所需的输入点和输出点较少,故选用小型且具有良好操控能力的西门子S7-200系列中的CPU224,选用扩展点数为32的EM223作为系统的数字扩展模块[3]。输入端与输出端的I/O分配表分别见表1和表2,控制系统PLC的输入输出接线图如图2所示。
4 组态环境设置
MCGS组态软件是一种控制与监视设备运行的通用工控界面编程软件。MCGS操作方便,设置简单,具有生动的构件,画面逼真,可运用于众多的输入输出设备。用户只要将PLC的I/O端配置完成,并将组态软件通过上位机与PLC连接,就可以实现与PLC之间的实时通信。进而实现机械手的运行状态监视和控制。
4.1 组态控制系统设计
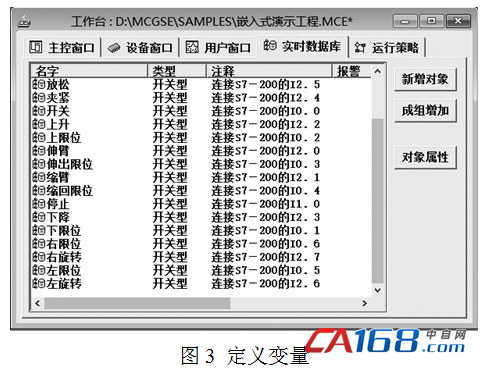
(1)在MCGS组态软件中,新建用户窗口“搬运机械手控制系统”。在实时数据库中,定义搬运机械手所需的各个变量,各个变量的设置参见图3所示。
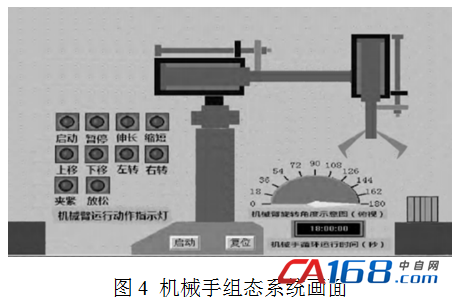
(2)建立组态画面,进行画面编辑和画面连接,绘制出机械手的动画部分。根据机械手的运行动作,进行元件选择。运用与机械手各部分动作相同的构件,以此来实现与机械手相同的动作。并用旋转仪表显示搬运机械手的转动角度,时间显示框显示机械手运行时间,加入动作指示灯和开关按钮,机械手组态系统画面如图4所示。
(3)进行运行策略的编辑,包括编写控制程序(脚本程序)和选用各种功能构件,用户可根据搬运机械手的运动要求进行脚本编辑,编辑的方式与基本的Basic语言编辑相似。运用运行策略达到对机械手运行流程的控制。
4.2 上位机连接PLC
在MCGS的设备窗口,添加通用串口父设备西门子_S7200PPI,设置参数。在设备属性设置中添加设备通道,然后根据PLC的输入输出进行通道连接,使组态画面与PLC实现实时通讯,连接方式见图5中的注释,将上位机的并行串口与PLC的编程口进行连接,达到实时通讯。进行设备的调试,调试的具体方法参见文献[4]。
PLC的运行状态不断被上位机读取并发送到MCGS组态软件,MCGS组态软件的控制指令被实时传送到PLC。上位机连接网络,并进行I/P地址设置和网络设置,工作人员便可通过Web网络操作和监视机械手的运行情况[5]。以此达到无人值守的自动化生产[6]。
5 结束语
运用PLC进行搬运机械手的控制,使机械手运行稳定可靠,对MCGS进行设置,并将MCGS端口与PLC端口连接,实现了自动化生产,并可进行远程监控和操作,也可根据需要进行远程Web操作。在网络盛行的时代,将工业生产与网络接轨具有重大意义。
参考文献
[1]黄斌达,王琦,陈发威.复杂曲面零件的逆向建模及数控加工仿真的研究[J]组合机床与自动化加工技
术,2010(12): 97-100.
[2]张伏,王唯,邱兆美等.基于MCGS组态软件的机械手控制系统设计.机床与液压,2015,43:23-27.
[3]韩伟娜,刘宝华.基于S7-200的搬运机械手的PLC控制.机械科学与技术,2011,30:259-261.
[4]连一峰,戴英侠,王航.基于模式挖掘的用户行为异常检测[J].计算机学报,2002,25(3):325-330.
[5]黄磊,罗振军,许文婧等.一种爬塔机器人的设计.仿真与控制[J],工程设计学报,2015,22: 476-481.
[6]万频,刘永军,李学聪等. PLC与触摸屏在汽车真空助力器在线测试中的应用[J],制造技术与机床,2007,2:
117-119
作者简介
侯 磊 (1992-) 男 工学学士 研究生在读 研究方向:机电一体化方向






共0条 [查看全部] 网友评论