


Abstract: Aiming at the disadvantages of the traditional PI controller, such as the poor ability to adapt to the load change, the lack of regulation ability and the poor robustness. The design of speed controller based on ADRC theory and the nonlinear function of fal optimization to make the ADRC have been promoted in direct torque control system of PMSM.The simulation results show that the speed controller based on ADRC theory can improve the response of speed, reduce the overshoot, effectively inhibit the effect on speed and load mutation. Compared with PI controller, it is more robust.
Key words: Active disturbance rejection; PMSM; Direct torque control; PI control
【中图分类号】TM341 【文献标识码】B 【文章编号】1561-0330(2017)12-0000-00
1引言
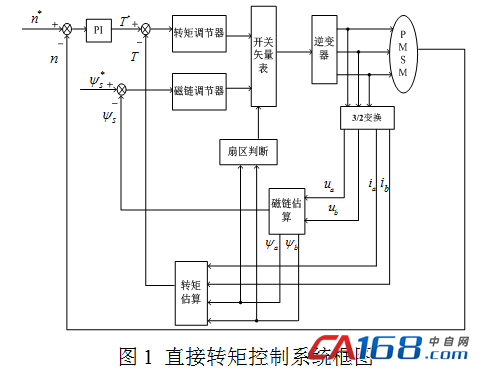
永磁同步电机具有高功率密度、高效率、高可靠及结构简单、体积小、重量轻等优点,尤其在当前节能减排的形式下,永磁电机被更广阔的应用在国民经济、日常生活等各领域。为了能够充分发挥永磁同步电机具有的竞争优势,那就需要结合电机自身的特点,为其配备良好的控制方法。直接转矩控制是继矢量控制之后发展起来的一种新型高性能交流变频调速技术。它通过空间矢量的方法,在定子坐标系下直接实现磁链和转矩的控制,提高了转矩动态响应能力[[i]]。
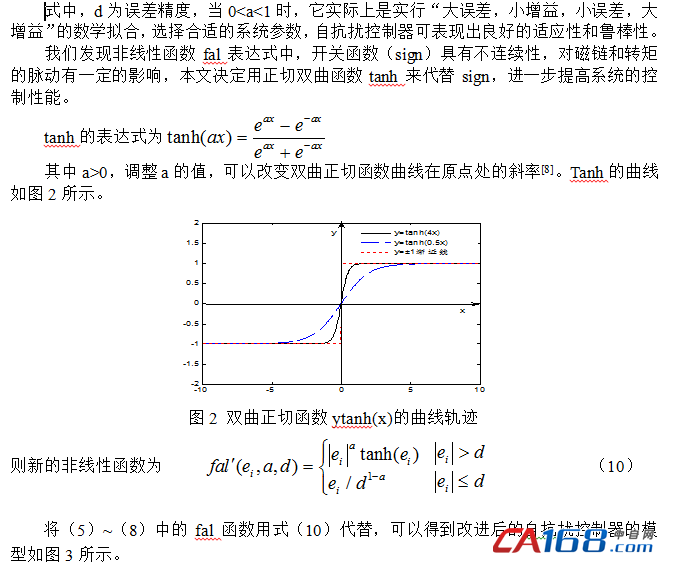
自抗扰控制技术是在20世纪90年代末由中科院研究员韩京清教授提出的一种新型控制策略。自抗扰控制技术可以说是经典控制理论与现代控制理论的有机结合,它一方面解决了被控系统的非线性和参数不确定的问题,另一方面又在一定程度上脱离了被控对象,做到不完全依赖被控对象的精确数学模型[[ii]]。鉴于大部分文献都是使用非线性函数fal进行自抗扰控制,本文考虑到转矩的脉动,利用双曲正切函数来替代fal函数中的开关函数sign,进而间接的减弱脉动。仿真结果表明,采用ADRC后速度无超调,稳态误差小,系统抗内外扰动能力明显增强,转矩波动也有改善。
3 自抗扰理论的转速控制器设计
3.1 自抗扰控制器
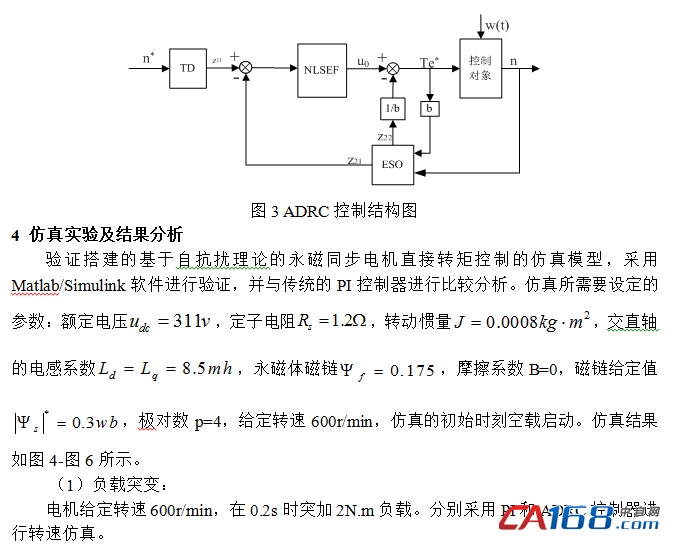
自抗扰控制器最大的优点就是对不确定的系统可以有效的控制,它由跟踪微分器(TD)、扩展状态观测器(ESO)、非线性组合(NLSEF)三部分组成,控制思想基于误差来消除误差,它是不完全依靠系统数学模型的控制律,这是由于扩展状态观测器能够实时估计并补偿系统在运行过程中受到的各种外部与内部扰动(负载扰动和电机本身参数时变扰动)的总和[[i]]。
3.2 基于自抗扰理论的转速调节器设计
当系统的被控对象为一阶时,其表达式为:
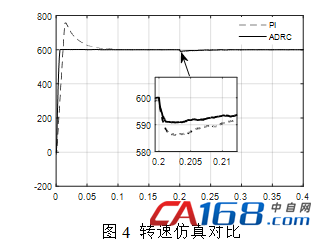
从图4可以看出,在PI控制下0.2s突加2![]() 的负载,电机的转速下降较大,且恢复到给定转速时间较长;当用ADRC控制器后,由于状态观测器ESO的及时补偿,电机的转速下降较小,同时恢复到给定值的时间较短。所以ADRC速度控制器和PI控制器相比,ADRC有较强的自调节能力和抗干扰能力。
的负载,电机的转速下降较大,且恢复到给定转速时间较长;当用ADRC控制器后,由于状态观测器ESO的及时补偿,电机的转速下降较小,同时恢复到给定值的时间较短。所以ADRC速度控制器和PI控制器相比,ADRC有较强的自调节能力和抗干扰能力。
(2) 转速和负载均突变:
给定转速600r/min,空载启动,在0.2s加负载2N.m,在0.3s时将转速突变为700r/min,分别在ADRC和PI控制下仿真并观察系统转速和转矩的波形。
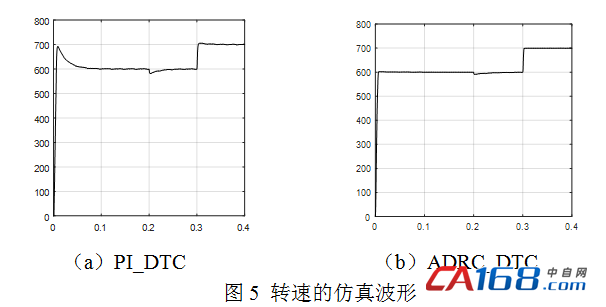
从图5看出,在PI控制下的直接转矩的速度响应稍慢,存在15%的超调,稳态时转速很难保持在给定值上;当转速在0.3s发生突变时,转速达到新的平衡时会有一点波动,静态误差明显。而使用ADRC控制器改进后,转速响应无超调,调节时间短,当转速突变后,由于ESO对扰动的估算并补偿,使转速迅速达到新的给定值700r/min,静态误差小。由此可见,ADRC具有很强的抗扰性和鲁棒性。
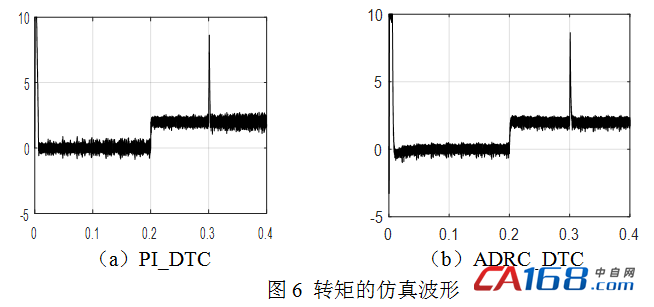
图6是在给定转速600r/min,0.2s时突加2N.m的负载,0.3s将转速突变为700r/min的情况下的转矩波形对比,传统PI控制器的转矩波形脉动较大,当加转速突变的扰动时,转矩脉动更加明显。而使用ADRC控制器后,由于将非线性函数fal中的不连续开关函数用光滑连续的双曲正切函数改进后,并通过ESO的扰动补偿,转矩的响应很及时,使转矩脉动有一定的改善。
5 总结
本文研究基于自抗扰控制理论的永磁同步电机直接转矩控制系统,在转速环中设计自抗扰控制器替代传统PI控制器,并对其中的非线性函数fal进行优化,仿真结果表明,优化后自抗扰控制器对于转速、负载突变带来的扰动具有估算和补偿的能力,同时也有效的解决响应快速性与超调量之间的矛盾,使系统具有很强的鲁棒性和抗扰性。
参考文献
[[1]]杨国良,李建雄.永磁同步电机控制技术[M].北京:知识产权出版社,2015:1-12.
[2]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,1999:11-15.
[3]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2012:3-28.
[4]Depenbrock M. Direct self-control (DSC) of inverter-fed induction machine[J]. Power
Electronics, IEEE Transactions on, 1988, 3(4): 420-429.
[5]胡育文.永磁同步电机直接转矩控制系统[M].北京:机械工业出版社,2015:16-38.
[6]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2013:19-110.
[7]焦娇娇,张兴华.永磁同步电机调速系统的自抗扰控制器设计[J].微电机,2015:77-80.
[8]Wu C, Qi R. The Simplified Active Disturbance Rejection Control for Permanent Magnet
Synchronous Motor Drive System[C]. The 32nd Chinese Control Conference 2013:4172-4176.
作者简介
葛如愿 (1991—) 男 硕士研究生 研究方向为电机传动与控制




共0条 [查看全部] 网友评论