
Abstract: In the salvage process, light visual observation environment and the low visibility caused by divers psychological burden problems cannot be used for divers, designed using sonar technology and organic vision together with visual helmet, the use of TV image 3D phased array sonar acquisition environment underwater, divers show through helmet diffractive optical display, the system the sonar image video into visual light video image, through a small head mounted display two-dimensional images produced by optical diffraction system, amplifying the light through the convex lens to make the image by refraction diffraction distance similar images, reflected to the diver's vision, and the diffraction screen does not affect the observation of divers underwater environment by light vision, with perspective effect.
Key words: Salvage; Visual helmet; Sonar systems
【中图分类号】P756.4 【文献标识码】B 【文章编号】1561-0330(2017)12-0000-00
1 背景
救援打捞是国家应急保障体系的重要组成部分,同时也是国家应对海上重大突发事件的中坚力量,随着我国经济持续发展,海上运输业、海洋油气业、海洋工程建筑业、滨海旅游业及捕捞养殖业等日益活跃和加速发展[1-2],船舶、飞机和人员在海上活动的数量、密度不断加大。救援打捞作为保障海上安全的主力军,起到了“保驾护航”的重要作用,有效地保证了我国海上活动的安全。
在打捞过程中,潜水员往往会碰到由于泥沙、污水和沉积物导致周围环境可见度和通透性比较低,采用光视觉观察周围的环境、沉积物、生物体、遇难人员以及机动设备等比较困难,低能见度环境制约光传感器使用,潜水员也无法用肉眼观察水底环境。同时,由于低能见度造成潜水员视野漆黑一片,造成潜水员的不安全感和极大地心里压力。因此,在打捞过程中,一般先在水面上用RUV声呐扫描进行观察分析,然后下水采用盲人摸象的方法探测水下物体,如韩国客轮“岁月号”打捞、“小白礁Ⅰ号”水下文物打捞和“三峡集航龙518”轮落水的集装箱打捞等都面临过同样的困难。由于声呐图像处理技术与潜水员视觉相脱离,不能合二为一的协同工作,造成声呐感知技术效率低下、反应慢,制约了潜水员的活动能力,甚至会导致潜水员生命遭到威胁。本文基于此目的,设计了一款头盔,将声呐成像技术和视觉头盔两者进行有机集成在一起,构成所谓的“声视觉”,方便潜水员自由灵活的观察和感知周围环境,摆脱传统的利用手摸感知周围环境的束缚,减轻潜水员的视觉漆黑一片的心理压力,提高机动性和应急处置能力。
2 立体视觉成像头盔系统设计
2.1 系统组成框架
考虑到声呐图像处理与光学图像处理的基本原理基本上是一样的,几乎所有的电磁波理论都可以用于声呐。但是,在低能见度条件的水下,电磁波容易被吸收,因而难以发挥作用,声呐具有水下穿透性,却可以发挥其优点。结合电磁波成像理论,利用水声学、相控阵、多普勒等原理,分析声呐成像的畸变致因,消除周围随机噪声和系统噪声,提高成像质量。本项目主要采用相控阵成像技术,在此基础上,结合傅里叶成像、超声弹性成像、合成孔镜成像、超声三维成像等技术,特别是重点探索傅里叶成像模型,分析动态聚焦成像、有限衍射波成像、角谱传播、宽带频谱合成像、单传感器成像方法,提高成像质量。
实时可视化头盔系统的全部功能可以划分为4个部分,即数据模块、三维图像模块、参数控制模块以及头盔显示模块,如图1所示。
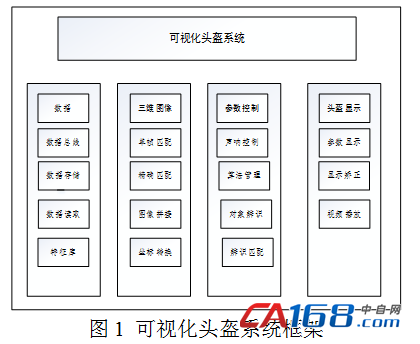
数据模块部分主要保存技术参数、辨识数据库和视角参数,并且通过总线接收相控阵上传的数据。一方面直接对数据进行实时化处理,另一方面将数据保存用于与水面指挥中心进行数据传输。
三维图像模块将检测到的空间数据进行空间变换,以满足潜水员视角。
参数控制模块将分别对三维建模模块和显示模块进行参数控制,对声呐探测的数据与物体辨识模块参数进行识别,识别对象,并将相关特征赋予对象。
显示模块是通过衍射光学的头盔显示系统,将单帧匹配结果显示在小窗口中,将全局配准和拼接结果显示在大窗口中,各窗口皆有交互显示功能。
2.2 系统工作流程
本头盔系统能对水下复杂环境进行实时检测和显示,首先由可视超声波探头对水底进行探测,发射声呐信号,并由该装置内的接收设备接收回波信号,由系统终端对回波信号进行分析处理和模型优化,然后基于潜水员视觉进行三维重构,最后显示在头盔的透明屏上。具体的工作流程如图2。

整个系统的子系统包括如下几个:
(1)声呐发射和接收系统;
(2)图像处理系统;
(3)图像显示系统;
(4)头盔光学成像系统。
3 声呐探头选型以及声呐发射接收系统
3.1 声呐探头选型
在对探头仪器选型之前需要明确的是水下特殊工况以及仪器的技术要求[7-8],经过分析总结可确定在水下的声呐探头应尽量满足下述要求:
(1)功耗较小,抗干扰能力强,性能稳定;
(2)测量精度较高;
(3)适合水下各种复杂环境;
(4)使用经济性好,便于维护安装;
(5)在水下穿透最好能到达5m左右,发射频率为500kHz。
根据这些要求对声呐探头进行选型更为合理和可靠,因此,本系统采用B超TY-6868A-1声呐探头,目前,医用B超技术都能通过现有设备探测,并从纹理、颜色、形态和结构等方面表征,能让潜水员感知物体种类。
3.2 声呐发射接收系统
在整个声呐发射接收系统中,占有重要位置的是其硬件电路设计。硬件电路设计的合理性将直接影响着整个系统的可靠性与稳定性。因此,在能够保证实现所需功能的基础上,还应该需要重点考虑以下几个重要原则:
(1)选择一些典型的芯片和应用电路,这样可以保证电路设计模块的正确,为系统的标准化打下良好的基础。
(2)尽量减小电路的复杂性,多选用集成性芯片。
(3)在芯片选择和电路排板时尽量考虑系统的可靠性和抗干扰性。
声呐发射接收系统主要由超声探头、超声波驱动发射电路、探头阵元选同电路和回波信号处理电路组成,每个部分分别实现不同的功能,共同完成信号的发射接收功能,即:超声波的激发、回波信号的产生、回波信号的接收与处理。该系统的主要功能部分如图3所。
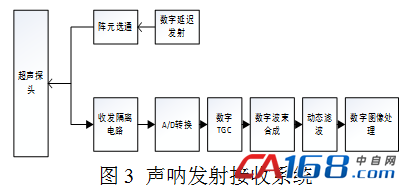
各个模块的数字化工作采用了数字集成芯片,例如FPGA、专用定制的ASIC、高速ADC以及完成数字扫描变换和数字信号处理功能的DSP等芯片。引入FPGA能够对超声波的发射接收两阶段的高精度延迟的实现提供了基础,并且能够在超声回波信号经过ADC之后的数字波束合成部分发挥极大的作用。
超声波的发射和回波信号接收的延时由FPGA完成数字延迟,在精度和控制简单程度上有很大的提高,在A/D后端的数字波束合成完全由FPGA完成,使得在系统灵活性、整体性和稳定性方面有了很大的加强。
4 图像处理系统和显示系统
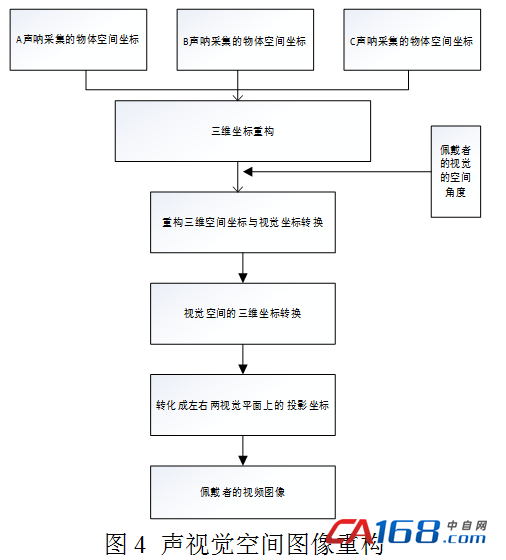
图像处理系统的主要功能是实现声视觉空间图像三维重构,它包括如下四个步骤:原始图像的获取、图像预处理、三维重建、图像的三维显示。三维重构即将经过处理的原始二维图像数据,生成三维可供绘制的几何图元和属性。一种方法是从二维图像序列中分割出有效区域重建,另一种方法是将二维图像序列构建成三维体素。图像的显示算法为表面三维重建,直接体式化,无需任何中间二维图元,最后,将每幅成像结果,进行动态、流畅衔接,构成潜水员的声视觉视频效果,具体工作流程如图4所示。
5 头盔光学成像系统
头盔光学成像系统的原理是将小型二维显示器所产生的影像藉由光学系统放大,具体而言,就是小型显示器所发射的光纤经过凸透镜使影像因折射产生类似远方的效果,利用此效果将远处的物体放大至远处观赏而达到所谓的全向视觉。[3-6]对其设计过程应该考虑以下几个方面:
(1)出瞳距离,理论上出瞳距离最下可以达到6mm,但是实际上,由人眼的光学结构可知,人眼的入瞳位于角膜后大约3mm,眼睑和眼帘毛需要9mm的空间,对于普通观察者而言,出瞳距离应该满足12-15mm,对于佩戴眼镜的观察者而言,至少应该满足20mm。[9-10]
(2)瞳距问题,人眼的瞳距一般在54-70mm之间,双目HMD的瞳距应该能良好的配合使用者的双目瞳距,
(4)质量因素,头盔显示器佩戴在潜水员的头部,它的特殊应用决定了其不仅应该满足一些特殊参数的要求外,同时要考虑人因工程原理,要考虑减少潜水员在使用中的不适感觉[11-12]。
6 结束语
针对水下打捞困难,设计了一款声视觉与潜水员人机合一的衍射光学显示头盔系统,使得未来的低能见度条件下的潜水员的海底视野不再是漆黑一片,看到声视觉图像中物体具有一定的空间感,打捞工作不再是盲人摸象,活动受到视野限制。创建了一种新的低能见度水下声视觉模式,提高潜水员的视觉感知能力,降低了潜水员的心理恐惧。
参考文献
[1]王祖温.救助打捞装备现状与发展[J].机械工程学报,2013,49(20):91-100.
[2]Michael David,Valera,Simmonds, Mohmed Salim.Head mounted display[J].US Patent 8,842,368; Simmonds, etal.September 23,2014.
[3]李华,张新,王超,史广维,付强.自由曲面机载头盔显示器光学系统设计[J].光学学报,2014.3,Vol. 34 No.3:0322001:1-6.
[4]McGuire,James P.Head mounted display devices[J].US Patent,7,450,310, November 11,2008.
[5]万华,周凡,胡银丰.水下三维场景实时成像系统[J].计算机工程,2013.12: Vol.39 No.12:180-184.
[6]吴金建.基于人类视觉系统的图像信息感知和图像质量评价[C].西安电子科技大学,博士论文,2014.
[7]李淑秋,李启虎,张春华.水下声学传感器网络的发展和应用[Z]. 声呐技术及其应用专题,2006,Vol.35 No.11:945-952.
[8]S.W. Smith, G.E. Trahey,O.T.von Ramm Show.Cover image Original contribution Phased array ultrasound imaging through planar tissue layers[J].Ultrasound in Medicine & Biology,Volume 12,Issue 3,March 1986:229–243.
[9]赵亚辉,范长江,应朝福,徐建程.含多层衍射光学元件的折、衍射混合头盔目镜[J].应用光学,2013,May,Vol.34 No.3:402-406.
[10]Bernier, Kenneth L. Mapping images from one or more sources into an image for display[J]. US patent 7,619,626,2009.11.17.
[11]李玉珠,郑卫刚.浅谈一流大学工程训练中心软实力及巧实力建设[J].网友世界2012(12):56-58.
[12]郑卫刚.简述智能机器人及发展趋势展望[J]. 智能机器人,2016,(04):41-43.




共0条 [查看全部] 网友评论